Download presentation
Presentation is loading. Please wait.

1
9 Timing Issues Contents 1. Clocking Schemes and Storage Elements
2. Clock Distribution Network 3. Self-Timed Logic Circuits 4. Synchronizers 5. Clock Generation & Synchronization

2
1. Clocking Schemes based on each storage element
Waveforms for D-latch, +ve edge-triggered D-f/f, and 2-phase double latch(latter two are equivalent to each other)
")
3
Clk1 and clk2 are non-overlapping each other
Finite State Machines based on each storage element Clk1 and clk2 are non-overlapping each other

4
CL Clock jitter(skew) positive skew negative skew signal direction clk
1 2 CL +ve clk clk’ -ve Positive skew tdelay,min must be obeyed. Otherwise, 2nd f/f, at the current sample point, samples the next value, not the current one (which is the correct one). called double clocking negative skew Tp-(tdelay,max + tsetup) must be obeyed. Otherwise, 2nd f/f, at the next sample point, samples the old value, not the updated value(which is the correct one).
. called double clocking. negative skew Tp-(tdelay,max + tsetup) must be obeyed. Otherwise, 2nd f/f, at the next sample point, samples the old value, not the updated value(which is the correct one).")
5
Single-phase system with edge-triggered flip-flops
negative skew의 경우임

6
i) maximum allowable clock skew = tskew,max (Race equation)
to prevent race condition, i.e., to prevent f/f from deciding Q with next input rather than current input. when hold time is ignored, tskew,max < tf/f,min+tcl,min when hold time is considered, tskew,max < tf/f,min+tcl,min- thold,max (thold:min. time a signal needs to stay stable after clock edge) ii) min. clock cycle time for correct operation with stable f/f inputs considering clock skew(Delay equation) Tp,min>tf/f,max+tcl.max+tsetup,max- tskew,max iii) tclk-width>thold, to guarantee correct data capture. 이만큼의 추가적인 여유가 있어야 next sample이 아닌 current 신호가 제대로 (hold time requirement를 만족하며) sample 된다. tskew가 +ve이면 실제로 TP가 tskew 만큼 늘어나는 효과가 있다. 즉, TP값이 그만큼의 여유가 생긴다. 아무리 edge-triggered f/f이지만(tve f/f의 경우) sampling edge 후에 thold 만큼은 clock이 high로 stay 해야 함.
 ii) min. clock cycle time for correct operation with stable f/f inputs considering clock skew(Delay equation) Tp,min>tf/f,max+tcl.max+tsetup,max- tskew,max. iii) tclk-width>thold, to guarantee correct data capture. 이만큼의 추가적인 여유가 있어야 next. sample이 아닌 current 신호가 제대로. (hold time requirement를 만족하며) sample 된다. tskew가 +ve이면 실제로 TP가 tskew 만큼. 늘어나는 효과가 있다. 즉, TP값이. 그만큼의 여유가 생긴다. 아무리 edge-triggered f/f이지만(tve f/f의 경우) sampling edge 후에. thold 만큼은 clock이 high로 stay 해야 함.")
7
Single-phase system with latches
- ve skew의 경우임

8
i) Race condition: double-sided constraint on clock width, tclk-width
clock width must be greater than tsetup.( tsetup for latch is the min. time a signal should remain stable before the fall of clock edge) tclk-width tsetup,max clock width must be shorter than the sum of 1-stage delay(consisting of tlatch and tcl) minus hold time and skew, to prevent any signal from passing through more than one stage. Tclk-width tlatch,min + tcl,min - thold,max - tskew,max ii) min. cycle time(in the critical stage) tcycle,min > tlatch,max + tcl,max + tsetup,max + tskew,max- tclk-width,min some delay as much as this can be transferred to the preceding or succeeding non-critical stages. -ve skew의 경우 이만큼 clk width가 effectively 줄어듬. clk이 후에도 current 신호가 이 시간만큼 유지되어야 함. 즉, clk이 하기 thold.max 만큼 전에는 next 신호가 오면 안됨. 합친 term 시간 이내에 delay와 setup까지 이루어져야 함. -ve skew의 경우에는 skew만큼 그 시간(tP+tW)이 줄어드는 것과 같다. tclk.width
 tclk-width tsetup,max. clock width must be shorter than the sum of 1-stage delay(consisting of tlatch and tcl) minus hold time and skew, to prevent any signal from passing through more than one stage. Tclk-width tlatch,min + tcl,min - thold,max - tskew,max. ii) min. cycle time(in the critical stage) tcycle,min > tlatch,max + tcl,max + tsetup,max + tskew,max- tclk-width,min. some delay as much as this can be transferred to the preceding or succeeding non-critical stages. -ve skew의 경우 이만큼 clk width가. effectively 줄어듬. clk이 후에도 current 신호가 이 시간만큼 유지되어야 함. 즉, clk이 하기 thold.max 만큼 전에는 next 신호가 오면 안됨. 합친 term 시간 이내에 delay와 setup까지 이루어져야 함. -ve skew의 경우에는 skew만큼. 그 시간(tP+tW)이 줄어드는 것과 같다. tclk.width.")
9
2-phase non-overlapping clock using double latchl

10
Single-phase, edge.trig f/f에 비해 이만큼 여유가 더 있음.
i) Race condition: thold-max < tnon-ol,min + tlatch,min + tlogic,min - tskew,max ii) min. cycle time(delay equation) tcycle,min > tnon-ol,max + tlatch,max + tlogic,max + tsetup,max - tskew,max iii) data capture condition tsetup < tclk-width 바꾸어 생각하면 편리
 Race condition: thold-max < tnon-ol,min + tlatch,min + tlogic,min - tskew,max. ii) min. cycle time(delay equation) tcycle,min > tnon-ol,max + tlatch,max + tlogic,max + tsetup,max - tskew,max. iii) data capture condition. tsetup < tclk-width. 바꾸어 생각하면 편리.")
11
Intentional clock skew

12
tcl2,min > tcl1,min , tcl3,min 일 때
CLK’ 은 앞으로 CLK” 은 뒤로 shift 시킴으로써 CL1, CL3에서 남은 시간을 CL2에서 활용 이때 CLK’ 을 너무 advance(혹은 CLK”를 너무 delay)시키면 CL2의 min. delay path가 ta(edge-triggered f/f 인 경우) 혹은 tb(latch인 경우) 보다 짧게 되어 race가 발생할 수 있다.
시키면 CL2의 min. delay path가 ta(edge-triggered f/f 인 경우) 혹은 tb(latch인 경우) 보다 짧게 되어 race가 발생할 수 있다.")
13
Relation between race condition( on max, clock skew) and delay condition( on min. clock period)
i) when data & clk are running in the same direction(positive skew) Clock skew should be tightly controlled to prevent race condition. With +ve skew, clock frequency can be increased for higher performance. ii) when data and clock are running in opposite direction(negative skew) No need to worry about race condition, But, -ve skew degrades the performance by increasing the min. clock period according to the delay equation.
 when data & clk are running in the same direction(positive skew) Clock skew should be tightly controlled to prevent race condition. With +ve skew, clock frequency can be increased for higher performance. ii) when data and clock are running in opposite direction(negative skew) No need to worry about race condition, But, -ve skew degrades the performance by increasing the min. clock period according to the delay equation.")
14
How to suppress race condition
1) routing clock in the opposite direction of data(easy to implement in datapath) at the cost of performance degradation 2) controlling the non-overlap periods of clock( in 2-phase clocking) 3) Try to obtain good clock distribution network to obtain as uniform clock skew as possible at the local clock point.( Absolute skew between clock source and local clock point is irrelevant) 4) Clock dist. Network interconnect material shape of the dist. Network clock driver/buffering schemes load, i.e., fan-out on the clock lines rise/fall time of the clock 5) Avoid global clock/ Use self-timed approach
 routing clock in the opposite direction of data(easy to implement in datapath) at the cost of performance degradation. 2) controlling the non-overlap periods of clock( in 2-phase clocking) 3) Try to obtain good clock distribution network to obtain as uniform clock skew as possible at the local clock point.( Absolute skew between clock source and local clock point is irrelevant) 4) Clock dist. Network. interconnect material. shape of the dist. Network. clock driver/buffering schemes. load, i.e., fan-out on the clock lines. rise/fall time of the clock. 5) Avoid global clock/ Use self-timed approach.")
15
2. Clock Distribution Network
H-tree as clock dist. Network clock receiver(photo-diode) at the center receiving sharp laser pulse through a glass window in the package
 at the center receiving sharp laser pulse through a glass window in the package.")
16
Two-level buffering(Hierarchy)
")
17
Composition of a PLL(Phase-Locked Loop)
i) Loop filter : loop filter is introduced to remove clock jitter. 1st to 3rd-order LPF is generally needed, as excessive phase shift due to high-order filtering can cause instability in this feedback structure. ii) Lock range : range of input frequency over which output follows input frequency over which output follows input with given relationship. iii) Lock time : time for PLL to lock into the input iv) Jitter : Loop filter(LPF) helps remove jitter.
 Loop filter : loop filter is introduced to remove clock jitter. 1st to 3rd-order LPF is generally needed, as excessive phase shift due to high-order filtering can cause instability in this feedback structure. ii) Lock range : range of input frequency over which output follows input frequency over which output follows input with given relationship. iii) Lock time : time for PLL to lock into the input. iv) Jitter : Loop filter(LPF) helps remove jitter.")
18
Simply generating local clocks from global clock generates clock skew causing inter-chip communication impossible.

19
How to minimize clock skew in multi-chip system, i. e
How to minimize clock skew in multi-chip system, i.e., board or multiple-board system. i) Global dist. Network. ii) On-chip clock generator/buffer PLL can help here only. iii) Local dist. Network. Global Clock Source
 Global dist. Network. ii) On-chip clock generator/buffer. PLL can help here only. iii) Local dist. Network. Global. Clock. Source.")
20
Each Component of Skew :
i) Chip-to-chip clock skew due to global dist. Network ; can be suppressed by ; placing clock pins/pads at the identical positions on the chip carrier/chip. Keeping the lead length and capacitive loading of clock pins and wires from the global clock source to each clock pin as identical as possible. ii) Skew due to on-chip clock generator/buffer can be suppressed by PLL;
 Chip-to-chip clock skew due to global dist. Network ; can be suppressed by ; placing clock pins/pads at the identical positions on the chip carrier/chip. Keeping the lead length and capacitive loading of clock pins and wires from the global clock source to each clock pin as identical as possible. ii) Skew due to on-chip clock generator/buffer can be suppressed by PLL;")
21
Each Component of PLL(Phase detector, LPF, voltage-controlled delay line)
")
22
Methodology for dealing with timing problems in LARGE systems ;
1) Divide the whole system into a number of regions, with each region operating in synchronous manner. 2) Communication among each region is either i) through a global clock slower(N) than local clock or ii) asynchronously using self-timed discipline.
 Divide the whole system into a number of regions, with each region operating in synchronous manner. 2) Communication among each region is either. i) through a global clock slower(N) than local clock or. ii) asynchronously using self-timed discipline.")
23
Using PLL for local synchronization between global & local clocks.
Delay of local clock is adjusted via. PLL to make the local clock edge occurring simultaneously with global clock edge.

24
Minimal skew system 1) equal-length chip-to-chip interconnection 2) PLL-based clock generator/buffer, and 3) equal-length on-chip distribution(H-tree)
 equal-length on-chip distribution(H-tree)")
25
Symmetric clock trees(H- vs X- tree)
- H-tree is better than X-tree in that i) in H-tree, no corners sharper than 90, thus with smaller inductive discontinuity, reflection is small. ii) in H-tree, fan-out is only 2, simplifying impedance matching
 in H-tree, no corners sharper than 90, thus with smaller inductive discontinuity, reflection is small. ii) in H-tree, fan-out is only 2, simplifying impedance matching.")
26
Reduction of inductive discontinuities at the corners of H-tree.

27
Zk+1 Zk Zk+1 Matching condition at the branch point :
- impedance matching occurs when Zk=Zk+1//Zk+1= Zk+1 Zk Zk+1 Zk+1 2

28
Driving the clock lines :

29
Sharpening clock signal at the receiver front before distribution in the subblock using schmitt trigger or source-end-terminated buffer.(Look at sharp rise of Vb in previous slide.)
")
30
RC network representation of H-clock tree(simplified as a distributed RC line):
When tailored H-clock tree is used, I.e., if the line width is halved at each branching point, above distributed RC tree network is equivalent to a uniformly distributed RC line.(R1= R2= R3=…, C1=2C2=4C3=...)
")
31
1) From distributed RC model ;
Requirement of the cross-sectional geometry(height, width) of interconnection line : 1) From distributed RC model ; Total distance from clock source to end point(ltot) in H-tree : Time required for the last node to reach 90% of its final value : Rint : resistance of interconnection per unit length Cint : capacitance per unit length
 of interconnection line : 1) From distributed RC model ; Total distance from clock source to end point(ltot) in H-tree : Time required for the last node to reach 90% of its final value : Rint : resistance of interconnection per unit length. Cint : capacitance per unit length.")
32
2) From lossy transmission line RC model :
Eq. (1), (2) need to be considered in determining H&W. For high frequency, skin effect prevents thickening the interconnection by more than 2-4 times the skin depth ineffective. For 1GHz, skin depth of aluminum is 2.8m.
, (2) need to be considered in determining H&W. For high frequency, skin effect prevents thickening the interconnection by more than 2-4 times the skin depth ineffective. For 1GHz, skin depth of aluminum is 2.8m.")
33
Simulation of H-clock tree with the last stage unmatched.

34
Reflections in the final unmatched branch :

35
3. Self-Timed Logic Circuits
Synchronous vs. Asynchronous(Self-Timed) i) In pipelined systems, performance(throughput) depends on worst case stage delay in synchronous systems, while it depends on average delay in self-timed systems. ii) (cons of synchronous system) : Distribution of high-speed clock over all region is a very difficult problem. iii) (cons of asynchronous systems) : Hand-shaking logic overhead.
 i) In pipelined systems, performance(throughput) depends on worst case stage delay in synchronous systems, while it depends on average delay in self-timed systems. ii) (cons of synchronous system) : Distribution of high-speed clock over all region is a very difficult problem. iii) (cons of asynchronous systems) : Hand-shaking logic overhead.")
36
Pipelined, synchronous datapath :
Self-timed pipelined datapath : R1 F1 R2 F2 R3 F3 R4 In Out tpreg tpF1 tpF2 tpF3 1 5 Req Req Req Req HS HS HS 2 6 Ack Ack Ack Ack 3 Start Done 4 7 Start Done 8 Start Done R1 F1 R2 F2 R3 F3 In Out tpF1 tpF2 tpF3

37
Sequence of Events : i) As input word arrives at the input of R1, I.e., at the input buffer(IN buffer) Req(to F1) is raised. If F1 is then available(inactive), data is transferred to R1 and Acknowledges it to IN buffer. ii) F1 is then enabled by ‘start’ signal ‘Done’ signal goes high indicating the completion of the computation. iii) Request to F2-module is issued. If F2 is available, Ack is raised, and the output from F1 is transferred to R2. F1 continues with its next sample for computing.
, data is transferred to R1 and Acknowledges it to IN buffer. ii) F1 is then enabled by ‘start’ signal. ‘Done’ signal goes high indicating the completion of the computation. iii) Request to F2-module is issued. If F2 is available, Ack is raised, and the output from F1 is transferred to R2. F1 continues with its next sample for computing.")
38
in transition(or reset)
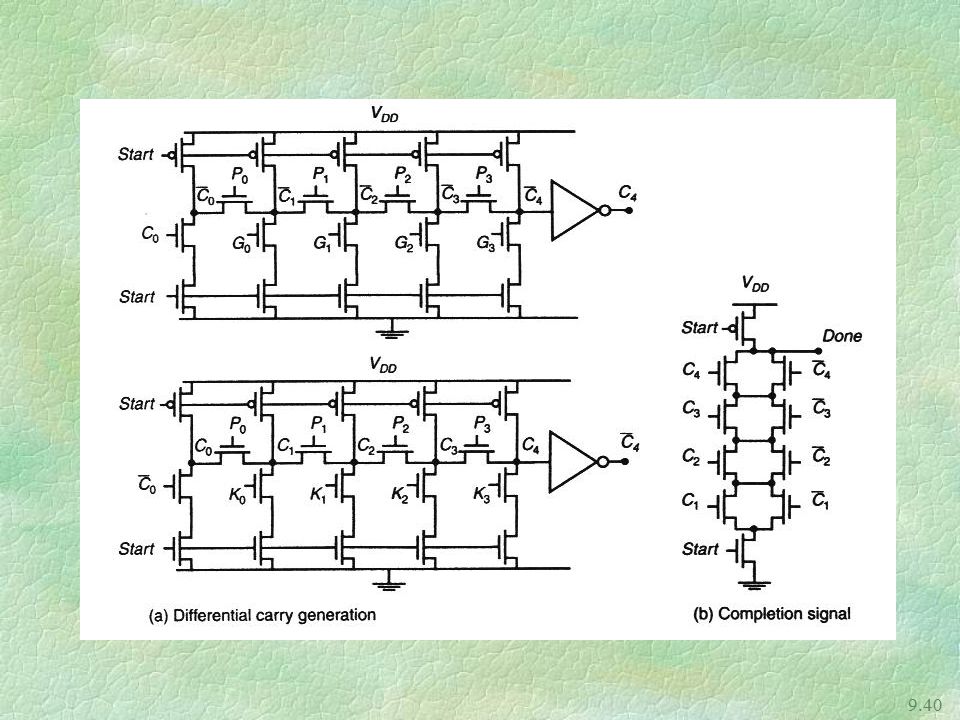
Completion(Done) signal generation : - redundant signal generation. Ex. 2bit per signal : 00 : out 11 : out 01 or 10 : out retains its current value. B B0 B1 in transition(or reset) 1 1 1 illegal 1 1
 signal generation : - redundant signal generation. Ex. 2bit per signal : 00 : out : out or 10 : out retains its current value. B. B0. B1. in transition(or reset) illegal")
39
Completion signal generation

41
Self-Timed signaling(2-cycle Hand shaking protocol)
")
42
Muller C-element

43
Implementation of Muller C(-element) element :
 element :")
44
An example showing Muller C-element.
1) 2) 2-, self-timed FIFO
 2) 2-, self-timed FIFO.")
45
4-cycle(4-phase) handshaking protocol :
ex) Implementation of 4-phase handshaking protocol
 Implementation of 4-phase handshaking protocol.")
46
Muller C element : Its output is 1 when all inputs are 1, and 0 when all inputs are 0 ; otherwise remains at its earlier state. Called as rendezvous, join or last-of circuit.

47
Implementation :

48
Implementation :

49
Conversion between single rail plus request and double rail data :

50
Conversion form chip to package pins :

51
ex) Self-timed CMOS PLA
Dummy line의 extra parasitic C에 의해 AND-plane의 모든 product line이 충분히 stable해진 후에 DONE이 “1”로 올라간다.

52
DONE 신호는 여러 개의 PLA를 cascade 시킬때 next PLA의 PC로 사용된다
DONE 신호는 여러 개의 PLA를 cascade 시킬때 next PLA의 PC로 사용된다. 이때 2nd PlA는 inverting input을 갖지 못한다.(정 필요하면 따로 1st PLA에서 만들어 주어야 함( unintended discharge) 어느 PLA의 입력이 여러 PLA에서 올때 : 가장 늦은 DONE을 PC로 받아야 함.
 어느 PLA의 입력이 여러 PLA에서 올때 : 가장 늦은 DONE을 PC로 받아야 함. ")
Similar presentations











 Shift Registers and Application Counters (Types,>")

 S – R Latch “Cross-Coupling” two NAND gates gives the S -R Latch:>")


. Finite-state machine (FSM) which is composed of a set of logic input feeding a block of combinational logic resulting in a set.>")


