Download presentation
Presentation is loading. Please wait.

1
DETECTING REGIONS OF INTEREST IN DYNAMIC SCENES WITH CAMERA MOTIONS

2
OUTLINE Introduction Related Work Detecting Regions of Interest Evaluation and Results Conclusion

3
INTRODUCTION Automation of where to move the camera, which is driven by activities and events in the scene,requires 1.knowledge of how the objects move in the scene 2.affordances related to how a camera can move to best capture these movements 3.ability to predict from motions of the camera and the dynamics of the scene where regions of interest are in the scene

4
INTRODUCTION

5
Our contributions in this paper are: 1.A method to generate a stochastic motion field that represents a global motion tendency using Gaussian process regression (GPR). 2.Techniques for predicting important future locations from mean and variance fields computed from the stochastic vector field. 3.An evaluation method for measuring the goodness of predicted important regions.

6
RELATED WORK Kim et al [6] introduced an approach to measure global tendencies from sparse set of motion with radial basis function (RBF) interpolation. This approach is used to predict the regions of importance in the scene of the soccer videos captured from multiple-static cameras
![RELATED WORK Kim et al [6] introduced an approach to measure global tendencies from sparse set of motion with radial basis function (RBF) interpolation.](http://images.slideplayer.com/13/3857848/slides/slide_6.jpg "This approach is used to predict the regions of importance in the scene of the soccer videos captured from multiple-static cameras.")
7
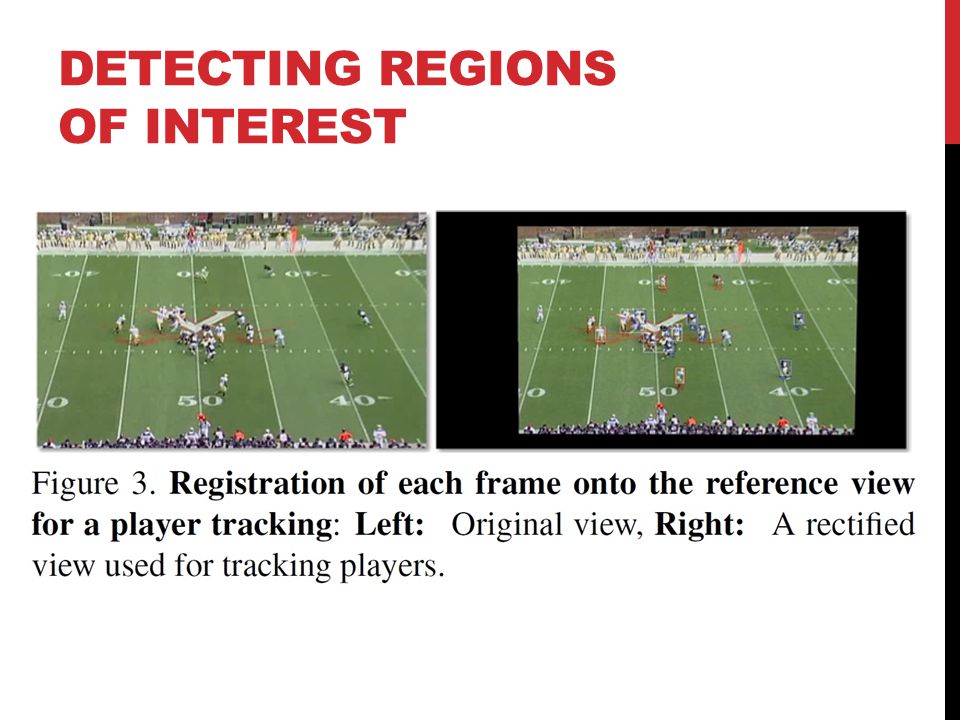
DETECTING REGIONS OF INTEREST

9
COVARIANCE 共變異數( Covariance )在機率論和統計學中用於衡量兩個變量的 總體誤差。 如果兩個變數的變化趨勢一致,也就是說如果其中一個大於自身的 期望值,另外一個也大於自身的期望值,那麼兩個變數之間的共變 異數就是正值。 如果兩個變數的變化趨勢相反,那麼兩個變數之間 的共變異數就是負值。
在機率論和統計學中用於衡量兩個變量的 總體誤差。 如果兩個變數的變化趨勢一致,也就是說如果其中一個大於自身的 期望值,另外一個也大於自身的期望值,那麼兩個變數之間的共變 異數就是正值。 如果兩個變數的變化趨勢相反,那麼兩個變數之間 的共變異數就是負值。")
10
COVARIANCE Covariance Function : Specifies the covariance between pairs of random variables. Covariance Matrix : In probability theory and statistics, a covariance matrix is a matrix whose element in the i, j position is the covariance between the i th and j th elements of a random vector.

11
REGRESSION

12
GAUSSIAN PROCESSES: DEFINITION

13
STOCHASTIC MOTION FIELD Let be a set of locations of extracted motion Each location x has a set of noisy observed velocity vector components: yu (the velocity component in the u-axis), yv (the velocity component in the v-axis), (and optionally yt for modeling the component in the time-axis). We assume that each velocity component at the location follows the regression model i.e., Normal distribution.

14
GAUSSIAN PROCESS REGRESSION We propose using the Gaussian process regression model, where f(x) is a zero-mean Gaussian process with covariance function It is completely specified by a mean function (typically assumed to be 0) and a covariance function
 is a zero-mean Gaussian process with covariance function It is completely specified by a mean function (typically assumed to be 0) and a covariance function")
15
GAUSSIAN PROCESS REGRESSION If we have training data The N x N covariance matrix K is now defined as We then define the observation vector y = y can be shown as a zero mean Gaussian process with a covariance matrix The posterior density for a test point is a normal distribution with the mean y and the variance var(y):
:")
16
GAUSSIAN PROCESS REGRESSION We can then express the mean flow as a vector field for two dimensional motions, and for three dimensional motions as with a variance for each velocity component respectively.

17
GAUSSIAN PROCESS REGRESSION

18
DETECTING LOCATIONS OF CONVERGENCE Two problems. 1.Propagating every vector in the field has been shown to be computationally intensive. 2.extrapolated velocity vectors with large magnitudes can seriously bias accumulation and yield an unstable localization of converging points.

19
DETECTING LOCATIONS OF CONVERGENCE 1.Instead of propagating a magnitude of velocity, we transport certainty levels computed from GPR. 2.We transport the certainties only for the locations with high certainty levels. 3.Transporting the certainty level requires updating only the last destination point and is computationally more efficient.

20
DETECTING LOCATIONS OF CONVERGENCE We first define an evaluating function,where is a motion field (mean field) For example, if we denote the location of a motion as the evaluating function iterates the locations by,where is computed from
 For example, if we denote the location of a motion as the evaluating function iterates the locations by,where is computed from")
21
DETECTING LOCATIONS OF CONVERGENCE

22
MEASURING THE SIMILARITY WITH FIELD OF VIEW

23
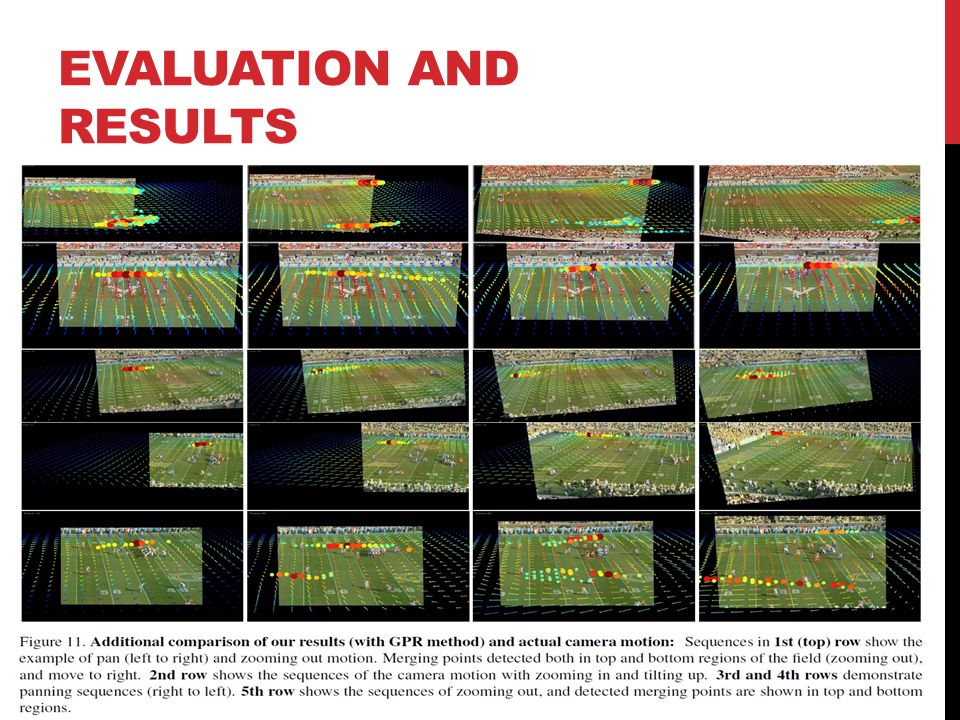
EVALUATION AND RESULTS

29
CONCLUSION We have shown that the prediction of the region of interests from stochastic field using Gaussian Process Regression provides robust results even with noisy motions from moving cameras. In our future work, we will work on 1.Improving the scalability of the code-base acceleration since most computations consist of matrix-matrix products 2.Applying our approach for controlling actual robotic cameras in real-time.

Similar presentations






 Qi Purdue CS Oct. 8 2008.>")





 ;而另一些 事件則會受到該事件現階段的狀況影響。>")



>")
 來判斷是否為場景變換,以方便使用者來 找出所要的片段。>")
 By 黃昱珽. 小考題目 大華用 SPSS 得到以下的資料: (圖表見下面) 說明 : BABYMORT = 嬰兒死亡率, GDP_CAP = 一國國民生產毛額, LIT_FEMA = 女性識字率。 資料來源 : 聯合國,>")
 Social Research Methods 2109 & 6507 Spring, 2006 March 8, 9, 13, 2006.>")

 一種質性資料, 其觀察值可歸類於數個不相交的項目內, 例 : 性別, 滿意度, …, 一般以各項的統計次數表現. 分析此種資料,通常用卡方檢定 類別資料分析 ----- 卡方檢定 卡方檢定基本理論 一個含有 k 項的試驗,設 p i.>")

