Download presentation
Presentation is loading. Please wait.

1
ELE22MIC Lecture 10 & 11 Serial Communications
Serial Data Formats - RS232 6850 ACIA HC-COM’s Serial Port IBM PC UART: The & 16554 RS232 / ITU V.24 / EIA232 Sample Interrupt Service Routine (ISR)
")
2
Serial Data Transmission (1)
Serial I/O is the transmission of data over a single communication line. Cheaper than parallel Data is moved sequentially one bit at a time. Requires a conversion from parallel data format to serial format. This conversion is normally performed by a shift register driven by a clock.

3
Serial Data Transmission (2)
At the receiving end, data must be reconstructed back into parallel format. Some method is required to identify bit boundaries. i.e.: how do you differentiate between 000 and 0000?

4
Serial Data Transmission (3)
Two methods: Synchronous Transmission Use a common clock to synchronise the receiver with the transmitter. Therefore requires a separate tine to carry the clock. Asynchronous Transmission The receiver and transmitter has separate, independent, accurate local clocks.

5
Synchronous Serial Data Transmission (4)
Synchronous Transmission is used with the Serial Peripheral Interface (SPI) See lecture 11. Uses 4 wires: Clock Data Select# Ground
 See lecture 11. Uses 4 wires: Clock. Data. Select# Ground.")
6
Asynchronous Serial Data Transmission (1)
RS232 Voltage Levels & Data Format Line Transciever with Charge Pump - the MAX232 series. Serial Data Format Start Bit, Data Bits, Parity, Stop Bits Errors: Framing, Overrun, False Start The 6850 ACIA (Asynchronous Communications Interface Adapter) AKA: UART (Universal Asynchronous Receiver Transmitter) or ACE (Asynchronous Communications Element) The RS232 Transmission Distance Limits
 AKA: UART (Universal Asynchronous Receiver Transmitter) or ACE (Asynchronous Communications Element) The RS232 Transmission Distance Limits.")
7
Clock Synchronisation (1)
The receiver phase locks its local clock to the transmitter's clock by detecting the start bit and stop bits of a serial frame. Thus it does not require a separate clock line as the data line contains timing information. If the data is sampled in the mid-point of each bit the clock error less than to 5% can be tolerated with communication remaining error-free between transmitter and receiver.

8
RS232 - Data Format

9
Clock Synchronisation (2)
Start bit signifies the beginning of the frame Stop bit(s) identify the end of the frame If the stop bits are received incorrectly it is assumed that the receiver’s clock has drifted out of phase, or some other error has occurred, and a FRAMING ERROR is declared
 identify the end of the frame. If the stop bits are received incorrectly it is assumed that the receiver’s clock has drifted out of phase, or some other error has occurred, and a FRAMING ERROR is declared.")
10
Serial Data Bit Sampling
The signal is sampled by the ACIA in the middle of each bit period.

11
Serial Communication Speed
The rate at which data is transmitted is called the bit-rate Bit-rate is measured in bits per second. Baud rate refers to the rate per second of the bit symbols used to transmit the serial data. i.e.: it includes the synchronisation items: start bit & stop bit(s). For example: If using 10 bit symbols per 8 bit character at 9600 baud equates to a bit rate of 7680 data bits per second (or 960 Bytes per second).
. For example: If using 10 bit symbols per 8 bit character at 9600 baud equates to a bit rate of 7680 data bits per second (or 960 Bytes per second).")
12
Serial Data Bit Error Detection
In any data transfer there is the potential for bit-errors. Parity can be used as a check that the correct bit pattern is received. Parity calculation involves adding the “1” bits in a frame together. Even Parity Adding all bits in frame + parity => ‘0’ Odd Parity Adding all bits in frame + parity => ‘1’

13
Serial Data Bit Error Detection

14
Bit Error Rate (BER) (1) The Bit Error Rate - Probability of bit error - is the number of bit errors measured at the receiver through a communication system. The transmission channel may be Radio, Optical Fibre, Copper Cable, etc. In analog communications the important unit of measure is the Signal to Noise ratio. These measures are useful to characterise a system and can be measured or simulated.

15
Bit Error Rate (BER) (2) If the quality of the system is high, the single bit error rate may be measured in years. In this case a single parity bit would be sufficient to determine data errors & re-transmission could recover the correct data. The probability of double-bit errors would become negligable. Double-bit errors cannot be detected using a single parity bit.

16
Improving Noise Immunity
One way of improving noise immunity: sample multiple times through each bit and at each sample time, check the status of each bit. Take the most common value of the sample as the bit value.

17
6850 : Status Register 0 RDRF Receive Data Register Full
1 TDRE Transmit Data Register Empty 2 DCD Data Carrier Detect 3 CTS Clear To Send 4 FE Framing Error 5 OVRN Receiver Overrun 6 PE Parity Error 7 IRQ IRQ pending

18
6850 : Bus Interface

19
6850 : Control Register Clock divisor: 0 Counter Divisor Select 1
Communication Settings: 2 Word Select 1 3 Word Select 2 4 Word Select 3 Interrupt Control: 5 Transmit Control 1 6 Transmit Control 2 7 Receiver Interrupt Enable

20
6850 : Configuration - Divisor
An ACIA may be configured to suit a range of serial communications formats by setting the appropriate bits in the control register Clock divisor: Control Register bits CR1, CR0 CR0 Counter Divisor Select 1 CR1 Counter Divisor Select 2 CR1 CR0 Description divide by 1 0 1 divide by 16 1 0 divide by 64 1 1 Master reset

21
6850 : Configuration - Word Format
Data word format Settings: CR2 Word Select 1 CR3 Word Select 2 CR4 Word Select 3 CR4 CR3 CR2 Description data bits, 2 stop bits, even parity data bits, 2 stop bits, odd parity data bits, 1 stop bit, even parity data bits, 1 stop bit, odd parity data bits, 2 stop bits, no parity data bits, 1 stop bit, no parity data bits, 1 stop bit, even parity data bits, 1 stop bit, odd parity

22
6850 : Configuration - Interrupts
Handshake and Interrupt Control: CR5 Transmit Control 1 CR6 Transmit Control 2 CR6 CR5 0 0 Set RTS = 0, Inhibit Transmit Interrupt 0 1 Set RTS = 0, Enable Transmit Interrupt 1 0 Set RTS = 1, Inhibit Transmit Interrupt 1 1 Set RTS = 0, Transmit “Break” and Inhibit Transmit Interrupt CR7 Receiver Interrupt Enable CR7 = 0 - Disable Interrupt in receive mode CR7 = 1 - Enable Interrupt in receive mode

23
HCCOM’s RS232 interface HCCOM uses Rockwell 6551 ACIA - similar to the M6850. The MAX238 converts from 0-5 volt signals to the +/- 10V signals required for RS232 standard. - Charge Pump.

24
Serial communications
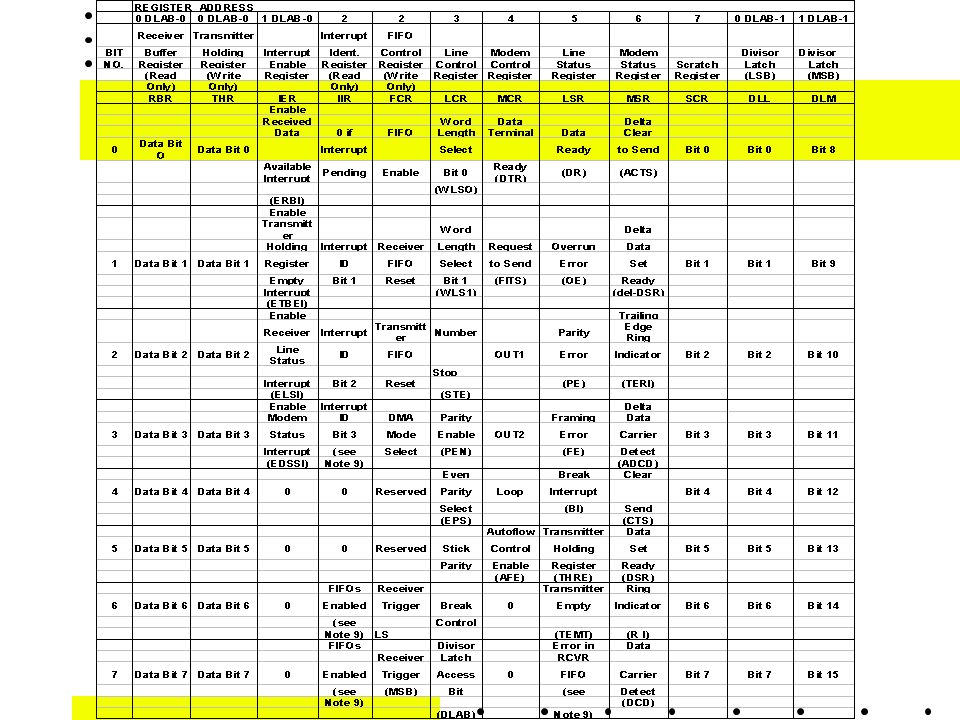
16550 UART Configuration

25
Serial communications
16550 UART Configuration At IO Address COM1 3F8..3FF, COM2 2F8..2FF, COM3 3E8..3EF, COM4 2F8..2FF

27
Serial communications
Interrupt Enable Register (IER) The IER enables each of the five types of interrupts and enables INTRPT in response to an interrupt generation. The IER can also disable the interrupt system by clearing bits 0 through 3. The contents of this register are summarised in the previous table
 The IER enables each of the five types of interrupts and enables INTRPT in response to an interrupt generation. The IER can also disable the interrupt system by clearing bits 0 through 3. The contents of this register are summarised in the previous table.")
28
Serial communications
Interrupt Identification Register (IIR) P1 The ACE has an on-chip interrupt generation and prioritization capability. The ACE provides four prioritized levels of interrupts: Priority 1 - Receiver line status (highest priority) Priority 2 - Receiver data ready/receiver character time-out Priority 3 - Transmitter holding register empty Priority 4 - Modem status (lowest priority) When an interrupt is generated, the IIR indicates that an interrupt is pending and encodes the type of interrupt in its three least significant bits (bits 0, 1, and 2).
 P1. The ACE has an on-chip interrupt generation and prioritization capability. The ACE provides four prioritized levels of interrupts: Priority 1 - Receiver line status (highest priority) Priority 2 - Receiver data ready/receiver character time-out. Priority 3 - Transmitter holding register empty. Priority 4 - Modem status (lowest priority) When an interrupt is generated, the IIR indicates that an interrupt is pending and encodes the type of interrupt in its three least significant bits (bits 0, 1, and 2).")
29
Serial communications
Interrupt Identification Register (IIR) P2 Detail on each bit is as follows: Bit 0: When bit 0 is cleared, an interrupt is pending Bits 1 and 2: These two bits identify the highest priority interrupt pending as indicated in the previous table. Bit 3: This bit is always cleared in 16C450 mode. In FIFO mode, bit 3 is set with bit 2 to indicate that a time-out interrupt is pending. Bits 4 and 5: not used (always cleared). Bits 6 and 7: These bits are always cleared in 16C450 mode. They are set when bit 0 of the FIFO control register is set.
 P2. Detail on each bit is as follows: Bit 0: When bit 0 is cleared, an interrupt is pending. Bits 1 and 2: These two bits identify the highest priority interrupt pending as indicated in the previous table. Bit 3: This bit is always cleared in 16C450 mode. In FIFO mode, bit 3 is set with bit 2 to indicate that a time-out interrupt is pending. Bits 4 and 5: not used (always cleared). Bits 6 and 7: These bits are always cleared in 16C450 mode. They are set when bit 0 of the FIFO control register is set.")
30
Serial communications
Line Control Register (LCR) In addition, the programmer is able to retrieve, inspect, and modify the contents of the LCR; this eliminates the need for separate storage of the line characteristics in system memory. Bits 0 and 1: Number of bits in each serial character. 00=5 bits, 01=6 bits, 10=7 bits, 11=8 bits Bit 2: Specifies either 1, 1.5 or 2 stop bits If Bit 3=: parity bit is generated in transmitted data between the last data word bit and the first stop bit. In received data parity is checked. If Bit 3=0: no parity is generated or checked.
 In addition, the programmer is able to retrieve, inspect, and modify the contents of the LCR; this eliminates. the need for separate storage of the line characteristics in system memory. Bits 0 and 1: Number of bits in each serial character. 00=5 bits, 01=6 bits, 10=7 bits, 11=8 bits. Bit 2: Specifies either 1, 1.5 or 2 stop bits. If Bit 3=: parity bit is generated in transmitted data between the last data word bit and the first stop bit. In received data parity is checked. If Bit 3=0: no parity is generated or checked.")
31
Serial communications
Line Control Register (LCR) When parity is enabled and: Bit 4=1 Even Parity - An even number of logic 1s in the data and parity bits is selected. Bit4=0 odd parity - An odd number of logic 1s is selected. Bit 5=1 Stick Parity. The parity bit set to 0. Bit 5=0 Stick parity is disabled.
 When parity is enabled and: Bit 4=1 Even Parity - An even number of logic 1s in the data and parity bits is selected. Bit4=0 odd parity - An odd number of logic 1s is selected. Bit 5=1 Stick Parity. The parity bit set to 0. Bit 5=0 Stick parity is disabled.")
32
Serial communications
Line Control Register (LCR) Bit 6: Break control bit. Bit 6 is set to force a break condition; i.e., a condition where SOUT is forced to the spacing (cleared) state. Bit 7: Divisor Latch Access Bit (DLAB). Bit 7 must be set to access the divisor latches of the baud generator during a read or write. Bit 7 must be cleared during a read or write to access the receiver buffer, the THR, or the IER.
 Bit 6: Break control bit. Bit 6 is set to force a break condition; i.e., a condition where SOUT is forced to the spacing (cleared) state. Bit 7: Divisor Latch Access Bit (DLAB). Bit 7 must be set to access the divisor latches of the baud generator during a read or write. Bit 7 must be cleared during a read or write to access the receiver buffer, the THR, or the IER.")
33
Serial communications
Line Status Register (LSR) Bit 0: Data Ready (DR) indicator for the receiver. DR is set whenever a complete incoming character has been received and transferred into the RBR or the FIFO. DR is cleared by reading all of the data in the RBR or the FIFO. Bit 1 : Overrun Error (OE) indicator. When OE is set, it indicates that before the character in the RBR was read, it was overwritten by the next character transferred into the register.
 Bit 0: Data Ready (DR) indicator for the receiver. DR is set whenever a complete incoming character has been received and transferred into the RBR or the FIFO. DR is cleared by reading all of the data in the RBR or the FIFO. Bit 1 : Overrun Error (OE) indicator. When OE is set, it indicates that before the character in the RBR was read, it was overwritten by the next character transferred into the register.")
34
Serial communications
Line Status Register (LSR) Bit 2: Parity Error (PE) indicator. When PE is set, it indicates that the parity of the received data character does not match the parity selected. In the FIFO mode, this error is associated with the particular character in the FIFO to which it applies. This error is revealed to the CPU when its associated character is at the top of the FIFO. Bit 3: Framing Error (FE) indicator. When FE is set, it indicates that the received character did not have a valid (set) stop bit. Bit 4: Break Interrupt (BI) indicator. When BI is set, it indicates that the received data input was held low for longer than a full-word transmission time.
 Bit 2: Parity Error (PE) indicator. When PE is set, it indicates that the parity of the received data character does not match the parity selected. In the FIFO mode, this error is associated with the particular character in the FIFO to which it applies. This error is revealed to the CPU when its associated character is at the top of the FIFO. Bit 3: Framing Error (FE) indicator. When FE is set, it indicates that the received character did not have a valid (set) stop bit. Bit 4: Break Interrupt (BI) indicator. When BI is set, it indicates that the received data input was held low for longer than a full-word transmission time.")
35
Serial communications
Line Status Register (LSR) Bit 5: Transmit Hold Register Empty (THRE) indicator. THRE is set when the THR is empty, indicating that the ACE is ready to transmit a new character. Bit 6: Transmitter Empty (TEMT) indicator. TEMT bit is set when the THR and the TSR are both empty. When either the THR or the TSR contains a data character, TEMT is cleared. In the FIFO mode, TEMT is set when the transmitter FIFO and shift register are both empty. Bit 7: Used In the FIFO mode to indicate an error condition in the FIFO buffer.
 Bit 5: Transmit Hold Register Empty (THRE) indicator. THRE is set when the THR is empty, indicating that the ACE is ready to transmit a new character. Bit 6: Transmitter Empty (TEMT) indicator. TEMT bit is set when the THR and the TSR are both empty. When either the THR or the TSR contains a data character, TEMT is cleared. In the FIFO mode, TEMT is set when the transmitter FIFO and shift register are both empty. Bit 7: Used In the FIFO mode to indicate an error condition in the FIFO buffer.")
36
Serial communications
Modem Control Register (MCR) Bit 0: This bit (DTR) controls the DTR output. Bit 1: This bit (RTS) controls the RTS output. Bit 2: This bit (OUT1) controls OUT1, a user-designated output signal. Bit 3: This bit (OUT2) controls OUT2, a user-designated output signal. Bit 5: AutoFlow Control Enable (AFE). When set, the autoflow control is enabled.
 Bit 0: This bit (DTR) controls the DTR output. Bit 1: This bit (RTS) controls the RTS output. Bit 2: This bit (OUT1) controls OUT1, a user-designated output signal. Bit 3: This bit (OUT2) controls OUT2, a user-designated output signal. Bit 5: AutoFlow Control Enable (AFE). When set, the autoflow control is enabled.")
37
Serial communications
Modem Control Register (MCR) Bit 4=1 Local Loop Back feature for diagnostic testing. The transmitter SOUT is set high. The receiver SIN is disconnected. The output of the TSR is looped back into the receiver shift register input. -The four modem control inputs (CTS, DSR, DCD, and RI) are disconnected. – The four modem control outputs (DTR, RTS, OUT1, and OUT2) are internally connected to the four modem control inputs. – The four modem control outputs are forced to the inactive (high) levels.
 Bit 4=1 Local Loop Back feature for diagnostic testing. The transmitter SOUT is set high. The receiver SIN is disconnected. The output of the TSR is looped back into the receiver shift register input. -The four modem control inputs (CTS, DSR, DCD, and RI) are disconnected. – The four modem control outputs (DTR, RTS, OUT1, and OUT2) are internally connected to the four. modem control inputs. – The four modem control outputs are forced to the inactive (high) levels.")
38
Serial communications
16550 UART BAUD RATE Generation using a MHz Crystal

39
Serial communications
16550 UART BAUD RATE Generation using a MHz Crystal

40
Establishing A Comms Link

41
Serial communications

42
Serial communications

43
Modern Serial communications
The 16C550x are functional upgrades of the of the 16C450 - equivalent to the 16C450 on power up, but can be placed in an alternate FIFO mode. The automatic FIFO mode relieves the CPU of excessive software overhead by buffering received and transmitted characters. The receiver and transmitter FIFOs store up to 16 bytes including three additional bits of error status per byte for the receiver FIFO.

44
Modern Serial communications
In the FIFO mode, there is a selectable autoflow control feature that can significantly reduce software overload and increase system efficiency by automatically controlling serial data flow using RTS output and CTS input signals.

45
Automatic Flow Control
ACE - Asynchronous Communications Element ACIA - Asynchronous Communications Interface Adapter UART - Universal Asyncronous Receiver Transmitter

46
RS232 Cables DTE (Data Terminal Equipment eg: Computers & Terminals)
DTE Pin Descriptions:

47
RS232 Cables DCE to DTE Straight Through Computer to Modem Cable

48
RS232 Cables Popular Wiring Methods for RS232
DTE to DTE “Null Modem” - Eg “Laplink”

49
RS232 Cables DTE to DTE “3-Wire Null Modem”
Serial Terminal to Computer Cable. Requires XON-XOFF flow control

50
RS232 Cables 9 Pin to 25 Pin Connector DTE-DTE cable

51
Serial communications
Typical 3-wire serial connection

52
Transmission Distance (1)
RS232 Communications has limited slew rate to decrease EMI radiation. The slew rate is due to driver current limiting and capacitance between the wires. The longer the wire, the greater the capacitance. Cable with capacitance of 40pF/m => 100m = 4nF.

53
Transmission Distance (2)
Speed versus distance limitations for EIA/TIA-232. Data Rate (baud) Distance (metres)
 Distance (metres)")
54
Interrupts (1) There are two ways of telling when an I/O device is ready: 1. polling 2. interrupts An interrupt is a way of diverting the processor's attention away from its current program so that it may deal with some event that has occurred. change in state of a peripheral error from a peripheral Using interrupts means the processor does not have to continuously poll (check) the status of I/O devices.
 the status of I/O devices.")
55
Interrupts (2) In some processors, an interrupt is also known as a TRAP. In other cases TRAPs refer to system-generated interrupts for example: errors such as : division by 0, invalid opcode, access invalid memory address There are two types of interrupt • hardware • software A hardware interrupt may be thought of as a hardware-generated call to a special subroutine.

56
Interrupts (3) The 68HC11 has three direct hardware interrupts.
1. IRQ saves the state of the processor - loads the IRQ vector - executes the IRQ ISR - restores the state of the processor - orginal program in resumed. IRQ is maskable 2. XIRQ high priority interrupt - non-maskable 3. RESET - RESET line is held low for 8 cycles, loads RESET vector, computer restarts and previous CPU state is lost. RESET used on power-up or after catastrophic hardware or software failure non-maskable (highest priority). Some processors have special interrupts known as fast interrupts. (They are fast as they don’t save the cpu state, but leave that to the ISR writer’s discretion)
. Some processors have special interrupts known as fast interrupts. (They are fast as they don’t save the cpu state, but leave that to the ISR writer’s discretion)")
57
Interrupts (4) When a processor receives an interrupt, it:
completes its current instruction masks further interrupts saves it current state loads address of routine to handle interrupt executes Interrupt Service Routine (ISR) to exit the ISR: Returns from interrupt using RTI instruction which restores the previous state
 to exit the ISR: Returns from interrupt using RTI instruction. which restores the previous state.")
58
Interrupts (5) Upon IRQ interrupt:
current instruction completes, if interrupts are not masked: the interrupt mask is set, then the 68HC11 saves on the stack: program counter Y index register X index register accumulator A accumulator B CCR Upon returning from any interrupt - uses the RTI instruction the 68HC11 pulls (pops) back from the stack:
 back from the stack:")
59
Interrupts (6) The Interrupt Service Routine (ISR) is a subroutine specifically designed to handle a given interrupt. An ISR is run when the processor receives an interrupt. The CPU loads the vector corresponding to that interrupt that points to the appropriate ISR. Each interrupt usually has a separate ISR associated with it. An ISR will then - determine the source of the interrupt - deal with event appropriately - Return from Interrupt (execute an RTI instruction)
")
60
Interrupts (7) Interrupts may be handled in two ways
Interrupt polling: - ISR checks each device to find the device that generated the interrupt - used when processor has limited number of interrupt lines (wired-OR IRQ#) - used when I/O device has several sources of interrupt Vectored interrupts: - each device corresponds to a single interrupt line and therefore a single vector or - an I/O operation will supply the processor with a vector appropriate for the event that has occurred
 - used when I/O device has several sources of interrupt. Vectored interrupts: - each device corresponds to a single interrupt line and therefore a single vector or. - an I/O operation will supply the processor with a vector appropriate for the event that has occurred.")
61
Vectored Interrupts (1)
Figure 3 Use of Priority Interrupt Controller (PIC) to handle multiple interrupt sources M68000 with Intel 8259A PIC.
 to handle multiple interrupt sources M68000 with Intel 8259A PIC.")
62
Software Interrupts (1)
The 68HC11 has just one software interrupt (swi). It is used to Call BUFFALO on HCCOM. On 80x86 systems the software interrupt is used by programs to request services from the operating system. ROM BIOS / DOS. eg: Print this character Read a character Read a string of characters Read from the disk xxxx bytes to memory yyyy Check for network errors Request for termination How software interrupts are implemented depends on the operating system.
. It is used to Call BUFFALO on HCCOM. On 80x86 systems the software interrupt is used by programs to request services from the operating system. ROM BIOS / DOS. eg: Print this character. Read a character. Read a string of characters. Read from the disk xxxx bytes to memory yyyy. Check for network errors. Request for termination. How software interrupts are implemented depends on the operating system.")
63
Software Interrupts (2)
Some computers may only have a few calls supported. Other processors may hundreds of different software interrupts and thousands of operating system calls supported. When an operating system is requested, via a Software Interrupt, to perform a task for a program, it has to have some way of determining which task is needed. This is accomplished using handles. A handle is a flag or indicator to the operating system indicating what is wanted. Each service available in the operating system has a handle associated with it.

64
Software Interrupts (3)
Read a character from the keyboard, and print a character to the screen, and print a string of characters to the screen. So we decide to assign three handles: 0 means Input a character from a keyboard 1 means print a character to the screen 2 means print a string of characters to the screen Further decide that the handle will be passed in the AccB. Hence, whenever an operating system processes a software interrupt, it checks the Acc. B and with the number found there, it knows what service is required of the calling program.

65
Software Interrupts (4)
Along with handles, such things as where the character to be printed is to be found where the input character is to be stored, are also defined. Let us suppose that we use the A accumulator to hold the character in both of the above instances. Then from application point of view, to read a character from the keyboard and then display it or screen, we have: LDAB # 0 ; load handle for reading a character SWI ; read in character, returns with ; character in accumulator A LDAB # 1 ; load handle for printing a character SWI ; print character

66
Software Interrupts (5)
Now, if the B accumulator had an important value which we wanted to keep, we would naturally push it to the stack before we loaded the first handle, then pull it back whet have finished. So the above program becomes: PSHB ; save accumulator B to the stack LDAB #0 ; load handler for reading a character SWI ; get operating sys to read into AccA LDAB #1 ; load handle for printing character SWI ; get operating system to print char PULB ; pull accumulator B from the stack

67
Software Interrupts (6)
Why use software interrupts? Why use handles? Operating systems and computers change with each new release. Locations of I/O devices and operating system subroutines may be different in each new version. The only thing that is constant is the location and function of the vector table. The vectors in a computer will always correctly locate the appropriate routines. By requesting the operating system function via a software interrupt, you avoid the possibility of your code not working on a new machine or operating system.

68
Software Interrupts (7)
When processing an interrupt, the processor loads the vector associated with that interrupt. The vector is the start address of the Interrupt Service Routine (ISR) for that interrupt. Vectors are located at a predefined location in the memory space. (Buffalo uses well-defined jump table locations for access to I/O routines. SWI is used to call Buffalo)
 for that interrupt. Vectors are located at a predefined location in the memory space. (Buffalo uses well-defined jump table locations for access to I/O routines. SWI is used to call Buffalo)")
69
Interrupt Vector Table
For the 68HC11, the main vectors are: Address Vector FFF2..FFF3 IRQ (external) FFF4..FFF5 XIRQ (external) FFF6..FFF7 SWI (Software Interrupt) FFF8..FFF9 Illegal opcode trap FFFA..FFFB COP Failure FFFC..FFFD Clock Monitor Fail FFFE..FFFF RESET The 68HC11 has many other vectors, but these are less relevant to this introductory course.
 FFF4..FFF5 XIRQ (external) FFF6..FFF7 SWI (Software Interrupt) FFF8..FFF9 Illegal opcode trap. FFFA..FFFB COP Failure. FFFC..FFFD Clock Monitor Fail FFFE..FFFF RESET. The 68HC11 has many other vectors, but these are less relevant to this introductory course.")
70
Example simple ISR LDX BUF_HEAD ; Get the buffer pointer
LDAA $7000 ; load character from ACIA STAA 0, X ; store character in buffer INX ; point to next byte in buffer CPX BUF_END ; is (X > end of buffer), then BLO NO_WRAP ; circular buffer - wrap to start LDX BUF_START ; NO_WRAP: STX BUF_HEAD ; save the pointer back RTI ; & return from interrupt BUF_HEAD RMB 2 BUF_START EQU 7FF0 BUF_END EQU 7FFF
, then. BLO NO_WRAP ; circular buffer - wrap to start. LDX BUF_START ; NO_WRAP: STX BUF_HEAD ; save the pointer back. RTI ; & return from interrupt. BUF_HEAD RMB 2. BUF_START EQU 7FF0. BUF_END EQU 7FFF.")
71
ISR cycle timing 59 cycles (minimum) * 0.5us = ISR time = 29us
Instruction Completion ; 9 Interrupt Entry ; 14 LDX BUF_HEAD ; 3 LDAA $7000 ; 2 STAA 0, X ; 4 INX ; 1 CPX BUF_END ; 4 BLO NO_WRAP ; 3 LDX BUF_START ; 3 NO_WRAP: STX BUF_HEAD ; 4 RTI ; 12 59 cycles (minimum) * 0.5us = ISR time = 29us What is this maximum data reception rate? 33898 interrupts / second, best case on 2MHz 68HC11 (8 MHz Crystal).
 * 0.5us = ISR time = 29us. What is this maximum data reception rate interrupts / second, best case on 2MHz 68HC11. (8 MHz Crystal).")
72
Acknowledgements I used Altium Protel 98 and Protel DXP to create these schematic diagrams Motorola 11rm.pdf Reference Manual IEEE Electronics Engineers’ Handbook, 4th Edn, Donald Christiansen - Definitions of BAUD & BER Seng Goh’s original notes

Similar presentations






>")












