Download presentation
Presentation is loading. Please wait.

1
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Continuous Planning and Collaboration for Command and Control in Joint Synthetic Battlespaces Jonathan Gratch Randall W. Hill, Jr. USC Information Sciences Institute

2
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Motivation Need cost-effective C2 modeling –Replace / augment human controllers with automated C2 –Represent a wide range of organizations and situations Need realistic C2 behavior –C2 models must make believable decisions –The outcomes of C2 operations need to be credible

3
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Project Goals Develop autonomous command forces –Act autonomously for days at a time Reduce load on human operators –Behave in human-like manner Produce realistic training environment –Perform C 3 I functions Reduce the number of human operators Create realistic organizational interactions

4
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Command Force Requirements Continuous Planning –Understand evolving situations –Achieve goals despite unplanned events Collaborative Planning –Understand behavior of other groups friendly forces and opposing forces –Understand organizational constraints communication, coordination, authority

5
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Command Force Requirements Intelligence –Identify information requirements –Focus intelligence collection efforts –Model intelligence constraints on planning Companion paper: –Deriving Priority Intelligence Requirements for Synthetic Command Entities

6
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Mission Capabilities Army Aviation Deep Attack –Battalion command agent –Company command agents –CSS command agent –AH64 Apache Rotary Wing Aircraft

7
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training BP FARP CSS HA FLOT

8
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Soar-CFOR Planning Architecture Support for continuous planning –Integrate planning, execution and repair –Continuous situation awareness Support for collaborative planning –Reasons about plans of multiple groups –Facilitates plan sharing among entities –Explicit plan management activities

9
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Simulation Architecture Battalion Commander Company A Commander Company X Commander Company A Pilot Helicopter Pilot Helicopter Pilot Helicopter ModSAF Company X Pilot Helicopter Pilot Helicopter Pilot Helicopter …. Operations Order (plan) Operations Order (plan) Operations Order (plan) Situation Report (understanding) Situation Report (understanding) Situation Report (understanding) Percepts Actions Percepts Actions
 Operations Order (plan) Operations Order (plan) Situation Report (understanding) Situation Report (understanding) Situation Report (understanding) Percepts Actions Percepts Actions.")
10
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Architecture Planner –Implements continuous planning capabilities Situation Assessment –Fuses sensors, reports, and expectations –Generates and updates current world view Plan manager –Supports collaborative planning capabilities Domain Theory –Declarative knowledge base of domain knowledge

11
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Continuous Planning Implements basic planning functions –Generates plans –Controls execution & coordination of subordinates –Recognizes Situation Interrupts and makes repairs INPUT: –Domain theory (tasks, plan fragments, assets) –Mission objectives, friendly/enemy plans (from OPORDER) –Existing plans –Current situation (from Situation Awareness)
 –Mission objectives, friendly/enemy plans (from OPORDER) –Existing plans –Current situation (from Situation Awareness)")
12
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training What are Plans? Hierarchically ordered sequences of tasks Plans capture assumptions –Column movement assumes enemy contact unlikely Plans capture task dependencies –Move_to_Holding_Area results in unit being at the HA, (precondition to moving to the Battle_Position) –OPFOR and Co must be at the Engage_area simultaneously
 –OPFOR and Co must be at the Engage_area simultaneously.")
13
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Company A plan Company B plan CSS plan Move Engage Return Move OPFOR Plan Move Battalion Tactical Plans Co Deep Attack Co Deep Attack FARP Operations

14
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Situation Interrupts Happen! destroyed(Enemy) Attack(A, Enemy) Move(A,BP) Engage(A,Enemy) at(A,BP)at(A,FARP)at(A,BP)destroyed(Enemy) at(A,FARP) at(Enemy,EA) Current World active(A) Start of OP ADA Attack active(A)
 Attack(A, Enemy) Move(A,BP) Engage(A,Enemy) at(A,BP)at(A,FARP)at(A,BP)destroyed(Enemy) at(A,FARP) at(Enemy,EA) Current World active(A) Start of OP ADA Attack active(A).")
15
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Reacting to Situation Interrupt Situations evolve unexpectedly –Goals change, actions fail, intelligence incorrect Planner detects if change affects plan –Invalidate assumptions? –Violate dependency constraints? Repair plans in response to ramifications –Retract tasks invalidated by change –Add new tasks –Re-compute dependencies

16
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Collaborative Planning Reason about plans of other entities –Friendly forces, OPFOR Reason about interactions between plans Reason about protocols for resolving conflicts Reason about my role in the organization

17
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Interaction Example Move(A,BP) Engage(A,Y) Dead(Y) Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(A,BP) at(gas,FAA) Operation Begins Combat Service Support Plan Attack Helicopter Company Plan resupplied(HQ)
 Engage(A,Y) Dead(Y) Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(A,BP) at(gas,FAA) Operation Begins Combat Service Support Plan Attack Helicopter Company Plan resupplied(HQ)")
18
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Planning Stances Authoritative –Order subordinate to alter his plans Tell CSS to abandon re-supply operation Deferential –Change my plans to de-conflict with superior Find a way to work around re-supply activity Adversarial –Try to introduce conflict in other agent’s plan

19
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Plan Management Must model when to use different stances –Involves organizational issues Where do I fit in the organization –Stances may need to change over time During COA Analysis, adopt an adversarial stance towards ones own plans Must model how stances influence planning –How do we alter COA generation

20
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training When to Use a Stance Model the collaborative planning process –Includes management tasks that modulate the generation of tactical plans Tasks refer to specific tactical plans Specify preconditions on changing stance –Includes knowledge of one’s organizational role Planner constructs management plans –Use same mechanisms as tactical planning

21
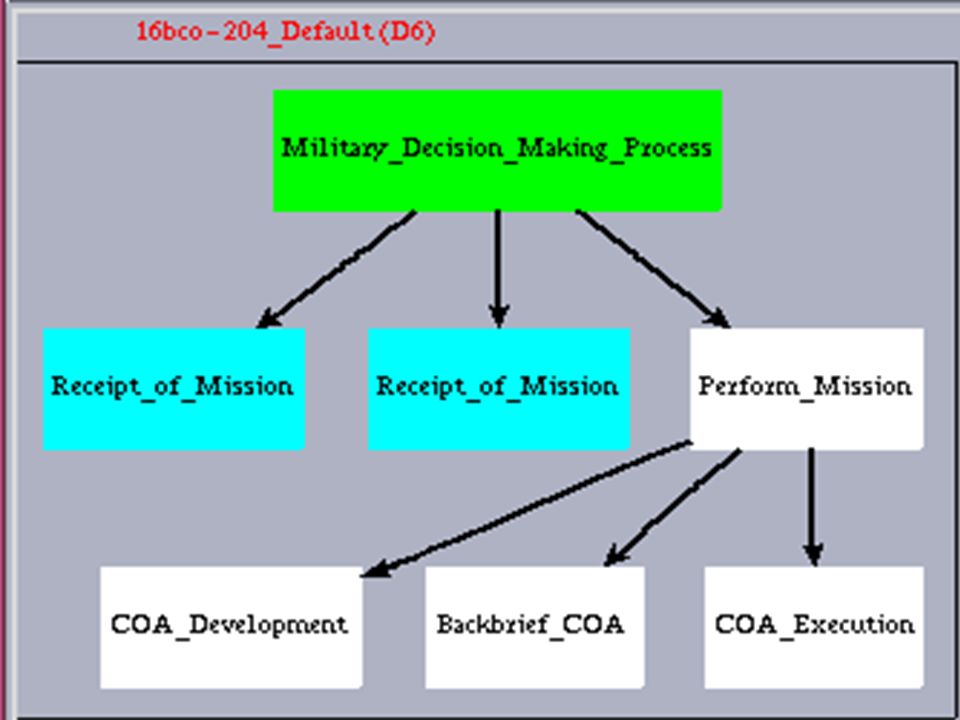
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Example Management Plan Explicitly modeling Military Decision Making Process COA Development Authoritative towards subordinates Deferential towards superiors Adversarial towards OPFOR COA Analysis Authoritative towards OPFOR Adversarial towards self (war gaming) TasksStances
 TasksStances")
22
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Implementing Stances Implemented as search control on planner –Plan manager: Takes executing management tasks Generates search control recommendations Example: Deferential Stance –When giving orders to subordinates Indicate subset of plan is fixed ( defer to this ) Indicate rest of plan is flexible –Plan manager enforces these restrictions
 Indicate rest of plan is flexible –Plan manager enforces these restrictions")
23
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Interaction Example Move(A,BP) Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(gas,FAA) Initial State Planner Retract Deferential towards Combat Service Support Plan Make CSS Planner defer to Company A’s Plan Manager
 Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(gas,FAA) Initial State Planner Retract Deferential towards Combat Service Support Plan Make CSS Planner defer to Company A’s Plan Manager")
24
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Architecture Encode theory of organizational interaction –Represent stances, authority relationships Processed by plan manager general purpose Reasoner (Planner) Plan Manager Management Plans Tactical Plans Management Theory domain independent Tactical Domain Theory
 Plan Manager Management Plans Tactical Plans Management Theory domain independent Tactical Domain Theory")
25
8th CGF & BR Conference 11 - 13 May 1999 Copyright 1999 Institute for Simulation & Training Summary Realistic, cost-effective C2 modeling –Automate C2 processes –Need flexible, multi-agent planning Continuous Planning –Integrates situation awareness, planning, execution, and repair Collaborative Planning –Reason about others’ plans, plan interactions –Represent wide range of organizational interactions using planning stances

Similar presentations




 with Collaborative Planning Agents Randall Hill and Jonathan Gratch University.>")





 Dr. Tom Ioerger.>")

 command and controlwarfare command.>")



>")



