Download presentation
Presentation is loading. Please wait.

1
JSIMS / ASTT Workshop 14 May 1999 Command and Control Modeling for Joint Synthetic Battlespaces Randall W. Hill, Jr. Jonathan Gratch USC Information Sciences Institute

2
JSIMS / ASTT Workshop 14 May 1999 Outline Synthetic Forces Problem Hypothesis Command and Decision Modeling Supporting Technologies Status of Work Maturity of Work Demonstration

3
JSIMS / ASTT Workshop 14 May 1999 Synthetic Forces Problem

4
JSIMS / ASTT Workshop 14 May 1999 Motivation Need cost-effective C2 modeling –Replace / augment human controllers with automated C2 –Represent a wide range of organizations and situations Need realistic C2 behavior –C2 models must make believable decisions –The outcomes of C2 operations need to be credible

5
JSIMS / ASTT Workshop 14 May 1999 Command Force Requirements Continuous Planning –Understand evolving situations –Achieve goals despite unplanned events Collaborative Planning –Understand behavior of other groups friendly forces and opposing forces –Understand organizational constraints communication, coordination, authority

6
JSIMS / ASTT Workshop 14 May 1999 Command Force Requirements Intelligence (Situation Awareness) –Identify information requirements –Focus intelligence collection efforts –Model intelligence constraints on planning
 –Identify information requirements –Focus intelligence collection efforts –Model intelligence constraints on planning")
7
JSIMS / ASTT Workshop 14 May 1999 Hypotheses

8
JSIMS / ASTT Workshop 14 May 1999 Hypotheses (1) Realistic C2 models require flexible group behavior The key to flexible behavior is handling situation interrupts –Understand the nature of the situation and adjust behavior appropriately –Achieve goals in spite of unexpected obstacles
 Realistic C2 models require flexible group behavior The key to flexible behavior is handling situation interrupts –Understand the nature of the situation and adjust behavior appropriately –Achieve goals in spite of unexpected obstacles")
9
JSIMS / ASTT Workshop 14 May 1999 Hypotheses (2) Flexible group behavior requires continuous planning, which interleaves –Situation awareness: understand other groups –Planning: plan for groups against groups –Execution: coordinated plan execution Flexible group behavior requires collaboration
 Flexible group behavior requires continuous planning, which interleaves –Situation awareness: understand other groups –Planning: plan for groups against groups –Execution: coordinated plan execution Flexible group behavior requires collaboration")
10
JSIMS / ASTT Workshop 14 May 1999 Command and Decision Modeling

11
JSIMS / ASTT Workshop 14 May 1999 Mission Capabilities Army Aviation Deep Attack –Battalion command agent –Company command agents –CSS command agent –AH64 Apache Rotary Wing Aircraft

12
BP FARP CSS HA FLOT

13
JSIMS / ASTT Workshop 14 May 1999 Soar-CFOR Planning Architecture Support for continuous planning –Integrates planning, execution and repair –Enhances situation awareness Support for collaborative planning –Reasons about plans of multiple groups –Plan sharing among entities –Explicit plan management activities Military Decision Making Process (MDMP) Organizational models Communication protocols
 Organizational models Communication protocols")
14
JSIMS / ASTT Workshop 14 May 1999 Simulation Architecture Battalion Commander Company A Commander Company X Commander Company A Pilot Helicopter Pilot Helicopter Pilot Helicopter ModSAF Company X Pilot Helicopter Pilot Helicopter Pilot Helicopter …. Operations Order (plan) Operations Order (plan) Operations Order (plan) Situation Report (understanding) Situation Report (understanding) Situation Report (understanding) Percepts Actions Percepts Actions
 Operations Order (plan) Operations Order (plan) Situation Report (understanding) Situation Report (understanding) Situation Report (understanding) Percepts Actions Percepts Actions.")
15
JSIMS / ASTT Workshop 14 May 1999 Command Agent Architecture Plan Management Plans Tactical Plans Tactical Model Management Model Plan Manager Situation Assessment Continuous Planner

16
JSIMS / ASTT Workshop 14 May 1999 Architecture Planner –Implements continuous planning capabilities Situation Assessment –Fuses sensors, reports, and expectations –generates and updates current world view Plan manager –Augments collaborative planning with: Organizational reasoning Military decision making process Domain Theory –Maintains plan management and tactical knowledge

17
JSIMS / ASTT Workshop 14 May 1999 Supporting Technologies Continuous Planning

18
JSIMS / ASTT Workshop 14 May 1999 Continuous Planning Implements basic planning functions –Generates plans –Controls execution & coordination of subordinates –Recognizes Situation Interrupts and makes repairs INPUT: –Domain theory (tasks, plan fragments, assets) –Mission objectives, friendly/enemy plans (from OPORDER) –Existing plans –Current situation (from Situation Awareness)
 –Mission objectives, friendly/enemy plans (from OPORDER) –Existing plans –Current situation (from Situation Awareness)")
19
JSIMS / ASTT Workshop 14 May 1999 Situation Assessment Hide information gathering details from Planner Derives consolidated picture of current situation from: –Radio reports (via 16 CCSIL message types) OpOrders, SitReps, Status Reps, Replacement Reqs, Flight Advisory, BDA, Request Passage Coordination, etc... –Vehicle Sensors (via MITRE CFOR platform services) –Expectations expected enemy contact (derived from OpOrder) frequency of subordinate Status Reps Rule-based reasoning Can perform limited sensing actions –e.g.. Request situation reports
 –Expectations expected enemy contact (derived from OpOrder) frequency of subordinate Status Reps Rule-based reasoning Can perform limited sensing actions –e.g.. Request situation reports.")
20
JSIMS / ASTT Workshop 14 May 1999 Situation Assessment Output List of facts currently true in the world –16B11 at holding_area ha11 –16B14 presumed dead –Enemy ADA platoon threatening battle_position bp141 –Target in EA nelson has been attritted –I’ve communicated order76 to 16C11 –I’ve received new orders from my commander Facts are echelon and unit type specific –Battalion tracks different information than company –CSS unit tracks different information than RWA unit –Determined by domain theory

21
JSIMS / ASTT Workshop 14 May 1999 What are Plans? Hierarchically ordered sequences of tasks Plans capture assumptions –Column movement assumes enemy contact unlikely Plans capture task dependencies –Move_to_Holding_Area results in unit being at the HA, (precondition to moving to the Battle_Position) –OPFOR and Co must be at the Engage_area simultaneously
 –OPFOR and Co must be at the Engage_area simultaneously.")
22
JSIMS / ASTT Workshop 14 May 1999 Planning Basics Plan generation –Sketch basic structure via decomposition –Fill in details with causal-link planning Plan execution –Explicitly initiate and terminate tasks –Initiate tasks whose preconditions unify with the current world –Terminate tasks whose effects unify with the current world

23
JSIMS / ASTT Workshop 14 May 1999 Plan Generation Example Destroyed(Enemy) Attack(A, Enemy) Move(A,BP) Engage(A,Enemy) at(A,BP)at(A,FARP) at(Enemy,EA) at(A,BP)Destroyed(Enemy) at(A,FARP) at(Enemy,EA) Current World... init

24
JSIMS / ASTT Workshop 14 May 1999 Situation Interrupts Happen! destroyed(Enemy) Attack(A, Enemy) Move(A,BP) Engage(A,Enemy) at(A,BP)at(A,FARP)at(A,BP)destroyed(Enemy) at(A,FARP) at(Enemy,EA) Current World active(A) Start of OP ADA Attack active(A)
 Attack(A, Enemy) Move(A,BP) Engage(A,Enemy) at(A,BP)at(A,FARP)at(A,BP)destroyed(Enemy) at(A,FARP) at(Enemy,EA) Current World active(A) Start of OP ADA Attack active(A).")
25
JSIMS / ASTT Workshop 14 May 1999 Reacting to Situation Interrupt Situations evolve unexpectedly –Goals change, actions fail, intelligence incorrect Planner detects if change affects plan –Invalidate assumptions? –Violate dependency constraints? Repair plans in response to ramifications –Retract tasks invalidated by change –Add new tasks –Re-compute dependencies

26
JSIMS / ASTT Workshop 14 May 1999 Supporting Technologies Collaborative Planning

27
JSIMS / ASTT Workshop 14 May 1999 Collaborative Planning Reason about plans of other entities –Friendly forces, OPFOR Reason about interactions between plans Reason about protocols for resolving conflicts Reason about my role in the organization

28
JSIMS / ASTT Workshop 14 May 1999 Interaction Example Move(A,BP) Engage(A,Y) Dead(Y) Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(A,BP) at(gas,FAA) Operation Begins Combat Service Support Plan Attack Helicopter Company Plan resupplied(HQ)
 Engage(A,Y) Dead(Y) Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(A,BP) at(gas,FAA) Operation Begins Combat Service Support Plan Attack Helicopter Company Plan resupplied(HQ)")
29
JSIMS / ASTT Workshop 14 May 1999 Planning Stances Authoritative –Order subordinate to alter his plans Tell CSS to abandon re-supply operation Deferential –Change my plans to de-conflict with superior Find a way to work around re-supply activity Adversarial –Try to introduce conflict in other agent’s plan

30
JSIMS / ASTT Workshop 14 May 1999 Plan Management Must model when to use different stances –Involves organizational issues Where do I fit in the organization –Stances may need to change over time During COA Analysis, adopt an adversarial stance towards ones own plans Must model how stances influence planning –How do we alter COA generation

31
JSIMS / ASTT Workshop 14 May 1999 When to Use a Stance Model the collaborative planning process –Includes management tasks that modulate the generation of tactical plans Tasks refer to specific tactical plans Specify preconditions on changing stance –Includes knowledge of one’s organizational role Planner constructs management plans –Use same mechanisms as tactical planning

32
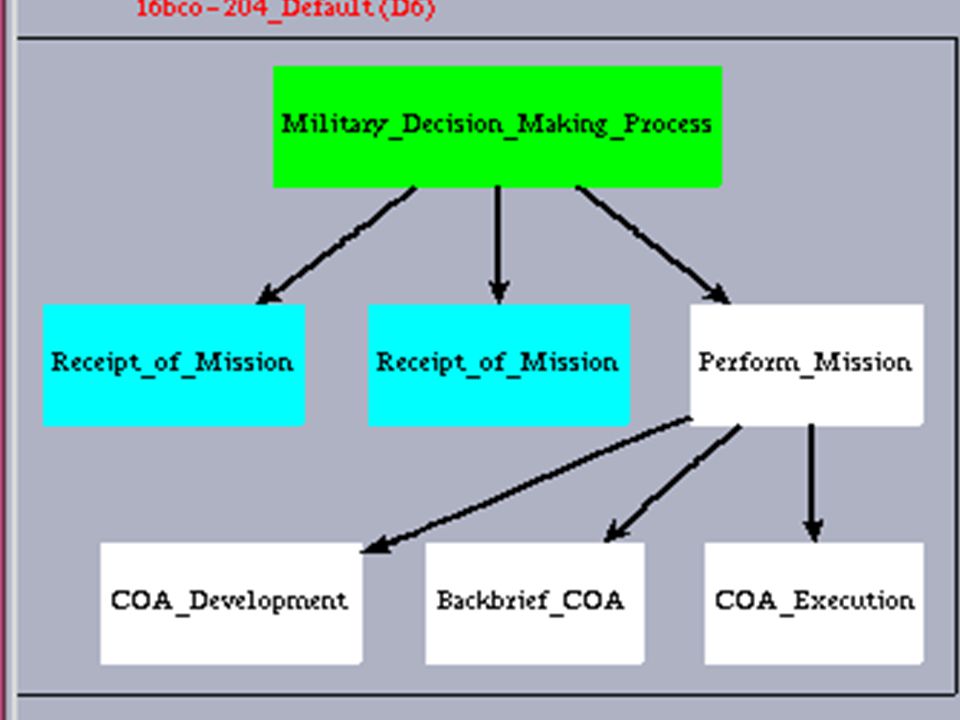
JSIMS / ASTT Workshop 14 May 1999 Example Management Plan Explicitly modeling Military Decision Making Process COA Development Authoritative towards subordinates Deferential towards superiors Adversarial towards OPFOR COA Analysis Authoritative towards OPFOR Adversarial towards self (war gaming) TasksStances
 TasksStances")
33
JSIMS / ASTT Workshop 14 May 1999 Implementing Stances Implemented as search control on planner –Plan manager: Takes executing management tasks Generates search control recommendations Example: Deferential Stance –When giving orders to subordinates Indicate subset of plan is fixed ( defer to this ) Indicate rest of plan is flexible –Plan manager enforces these restrictions
 Indicate rest of plan is flexible –Plan manager enforces these restrictions")
34
JSIMS / ASTT Workshop 14 May 1999 Interaction Example Move(A,BP) Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(gas,FAA) Initial State Planner Retract Deferential towards Combat Service Support Plan Make CSS Planner defer to Company A’s Plan Manager
 Move(CSS,HQ) at(CSS,HQ) at(CSS,FAA) at(gas,FAA) at(gas,HQ) at(A,BP) at(A,FAA) at(gas,FAA) Initial State Planner Retract Deferential towards Combat Service Support Plan Make CSS Planner defer to Company A’s Plan Manager")
35
JSIMS / ASTT Workshop 14 May 1999 Approach Encode theory of organizational interaction –Represent stances, authority relationships Processed by plan manager general purpose Reasoner (Planner) Plan Manager Management Plans Tactical Plans Management Theory domain independent Tactical Domain Theory
 Plan Manager Management Plans Tactical Plans Management Theory domain independent Tactical Domain Theory")
36
JSIMS / ASTT Workshop 14 May 1999 Supporting Technologies Intelligence Modeling

37
JSIMS / ASTT Workshop 14 May 1999 Motivation Largely ignored intelligence issues e.g. STOW program did model Sensor platforms like JSTARS Information networks like CGS Intelligence system Did not model How information transformed into intelligence Collection management

38
JSIMS / ASTT Workshop 14 May 1999 Intelligence critical for realistic C 2 Close interplay between intelligence and COA Development Intelligence guides COA development COA development drives intelligence needs Intelligence availability constrains actions –Some COA must be abandoned if one can’t gather adequate intelligence

39
JSIMS / ASTT Workshop 14 May 1999 Intelligence critical for realistic C 2 Intelligence constrains pace of battle When can a satellite observe? How long to insert surveillance (LRSU)? How long before I must commit to COA?
. How long before I must commit to COA .")
40
JSIMS / ASTT Workshop 14 May 1999 Intelligence critical for realistic C 2 Intelligence collection must be focused –Commanders must: Prioritize their intelligence needs Understand higher-level intelligence priorities Provide intelligence guidance to subordinates e.g. Simulation Information Filtering Tool [Stone et. al]

41
JSIMS / ASTT Workshop 14 May 1999 Priority Intelligence Requirements Focus on specification and use of PIR Information that directly feeds the key decisions that will determine the success or failure of the mission –Key component of Army mission planning Specified in CCIR section of Operation Orders –Specifies what Cdr wants to know about OPFOR –Drives position of sensors and observation posts

42
JSIMS / ASTT Workshop 14 May 1999 Brigade Planning (simplified) –Identify Engagement Area (EA Pad) Should canalize OPFOR and restrict movement –Identify launch time Require 2-hour notice EA Pad AA Lincoln Attack 2 nd echelon tank division (TD)
 –Identify Engagement Area (EA Pad) Should canalize OPFOR and restrict movement –Identify launch time Require 2-hour notice EA Pad AA Lincoln Attack 2 nd echelon tank division (TD)")
43
JSIMS / ASTT Workshop 14 May 1999 PL ECHO Brigade PIR –When will TD leave AA Lincoln? Verifies enemy intent –When will TD reach PL Echo? Satisfies the need for 2-hour notice Further verifies enemy intent Location of PL Echo driven by PIR EA Pad AA Lincoln 2hrs

44
JSIMS / ASTT Workshop 14 May 1999 EA Pad PL ECHO Intelligence Plan SLAR Monitor movement from assembly area LRSU Trigger attack: TD 2hrs from EA Pad Assembly Area

45
JSIMS / ASTT Workshop 14 May 1999 Final Brigade Plan Execute Mission Arrive at EA Break Contact Decision Point H H+2 H+3H-8 H-10 Insert LRSULRSU monitor PL Echo Deep Attack SLAR monitor AA

46
JSIMS / ASTT Workshop 14 May 1999 Automating PIR Identify PIR in my own plans –Find preconditions, assumptions, and triggering conditions that are dependent on OPFOR behavior Extract PIR from higher echelon orders –Specialize as appropriate for my areas of operation Derive tasks for satisfying PIR –Sensor placement Ensure consistency of augmented plans

47
JSIMS / ASTT Workshop 14 May 1999

48
JSIMS / ASTT Workshop 14 May 1999 Summary Realistic, cost-effective C2 modeling –Automate C2 processes –Need flexible, multi-agent planning Continuous Planning –Integrates situation awareness, planning, execution, and repair Collaborative Planning –Reason about others’ plans, plan interactions –Represent wide range of organizational interactions using planning stances

49
JSIMS / ASTT Workshop 14 May 1999 Status of Work

50
JSIMS / ASTT Workshop 14 May 1999 Status C2 Agent Work To Be Done –Augment temporal –Finish PIR prototype –Sit assessment augmentation –Supporting Documentation –Evaluation –Abstract specification of planner –More work on stances as time avails

51
JSIMS / ASTT Workshop 14 May 1999 C2 Knowledge Base C2 knowledge base (KB) –Domain theory for Attack Helicopter Battalion / Company –Domain-independent planning and collaboration KB
 –Domain theory for Attack Helicopter Battalion / Company –Domain-independent planning and collaboration KB")
52
JSIMS / ASTT Workshop 14 May 1999 RWA Soar Agents Intelligent Synthetic Forces –RWA-Soar pilots capable of taking direction from C2 agent

53
JSIMS / ASTT Workshop 14 May 1999 Maturity of Work

54
JSIMS / ASTT Workshop 14 May 1999 Maturity Conceptually mature (algorithmic) –continuous planning mature weak link is search control issues –collaboration approaching maturity Needs work before transition to operational status –robustification –KA issues tools –Are there issues in modeling other platforms?
 –continuous planning mature weak link is search control issues –collaboration approaching maturity Needs work before transition to operational status –robustification –KA issues tools –Are there issues in modeling other platforms")
55
JSIMS / ASTT Workshop 14 May 1999 Demonstration

56
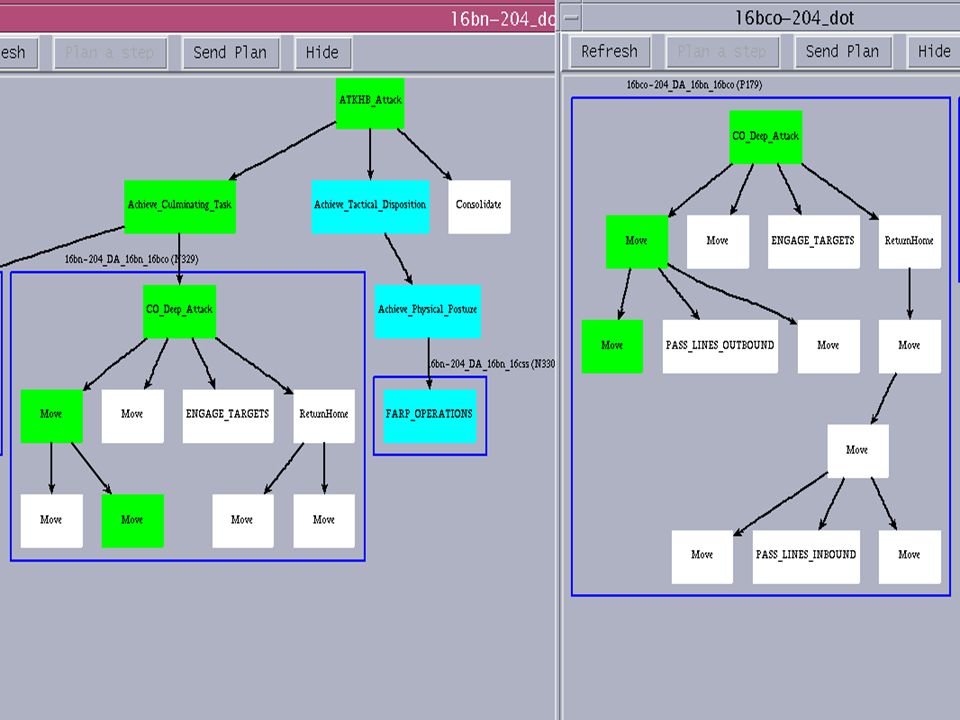
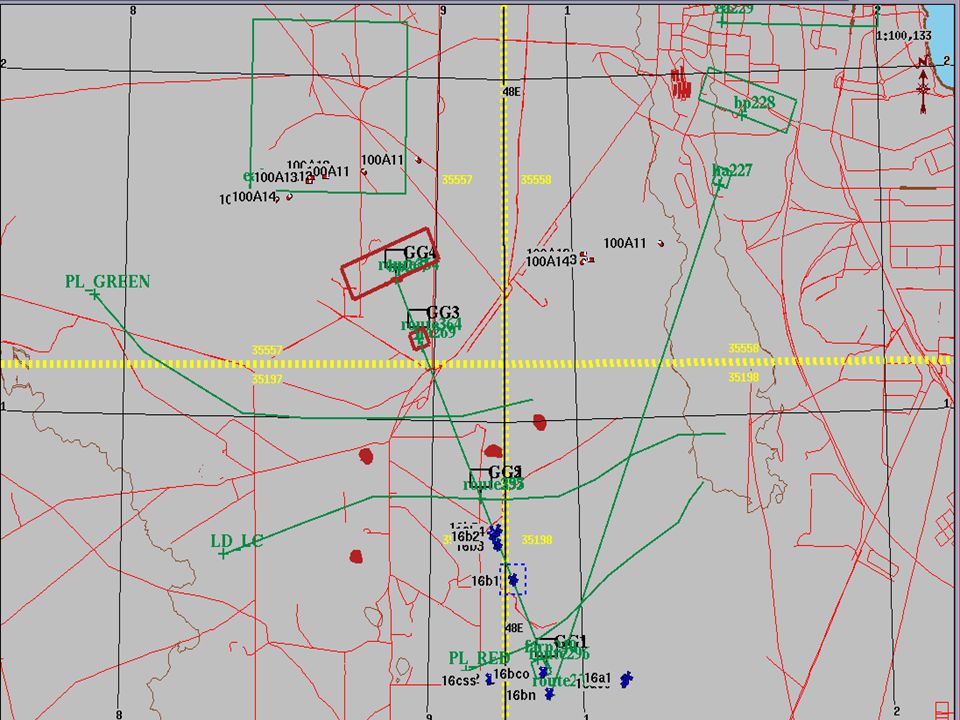
JSIMS / ASTT Workshop 14 May 1999 Demonstration Scenario Attack Helicopter Battalion (AH-64) –Battalion Commander –3 Helicopter Companies Company Commanders Apache Pilots –1 Combat Service Support Commander Deep Attack Mission Scenario –Companies move from Assembly Area to Holding Area –Situation interrupt: unexpected enemy forces in Holding Area –Dynamically re-plan and execute mission
 –Battalion Commander –3 Helicopter Companies Company Commanders Apache Pilots –1 Combat Service Support Commander Deep Attack Mission Scenario –Companies move from Assembly Area to Holding Area –Situation interrupt: unexpected enemy forces in Holding Area –Dynamically re-plan and execute mission")
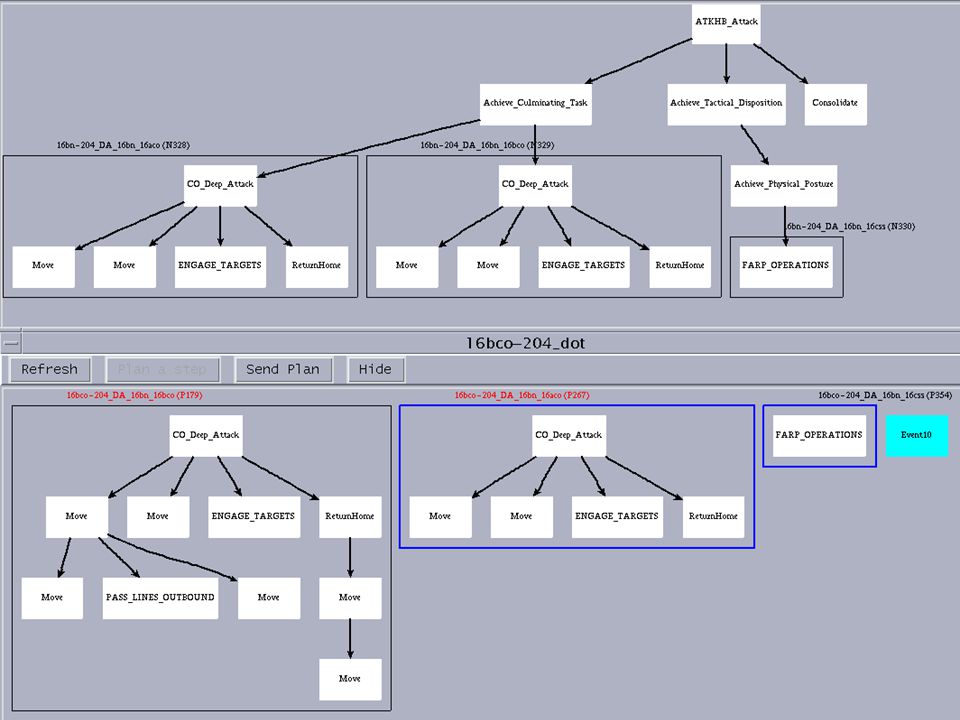
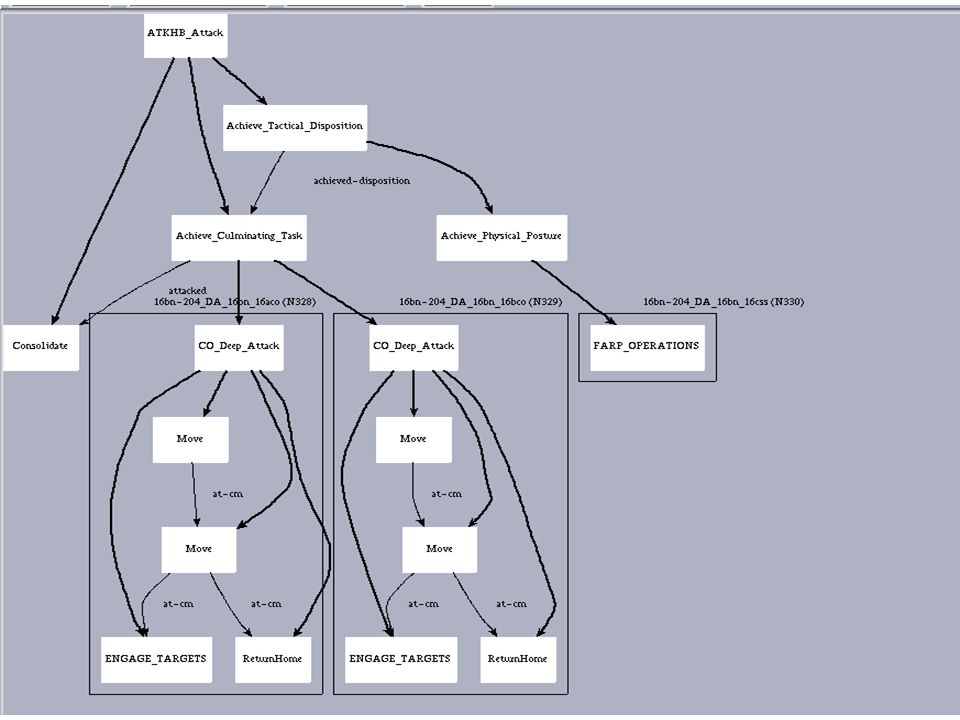
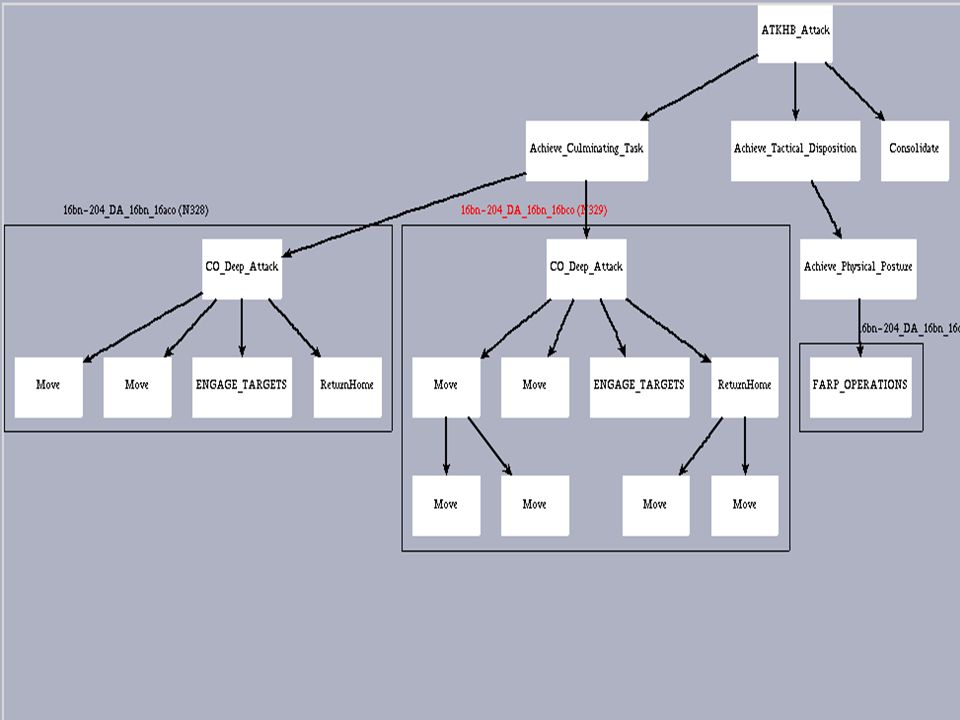
63
Company A plan Company B plan CSS plan Move Engage Return Move OPFOR Plan Move Battalion Tactical Plans Co Deep Attack Co Deep Attack FARP Operations

Similar presentations



 with Collaborative Planning Agents Randall Hill and Jonathan Gratch University.>")


 Dr. Tom Ioerger.>")




>")







