Download presentation
Presentation is loading. Please wait.

1
Programming and Electronics Training
Monica Begnaud Cody Stafford

2
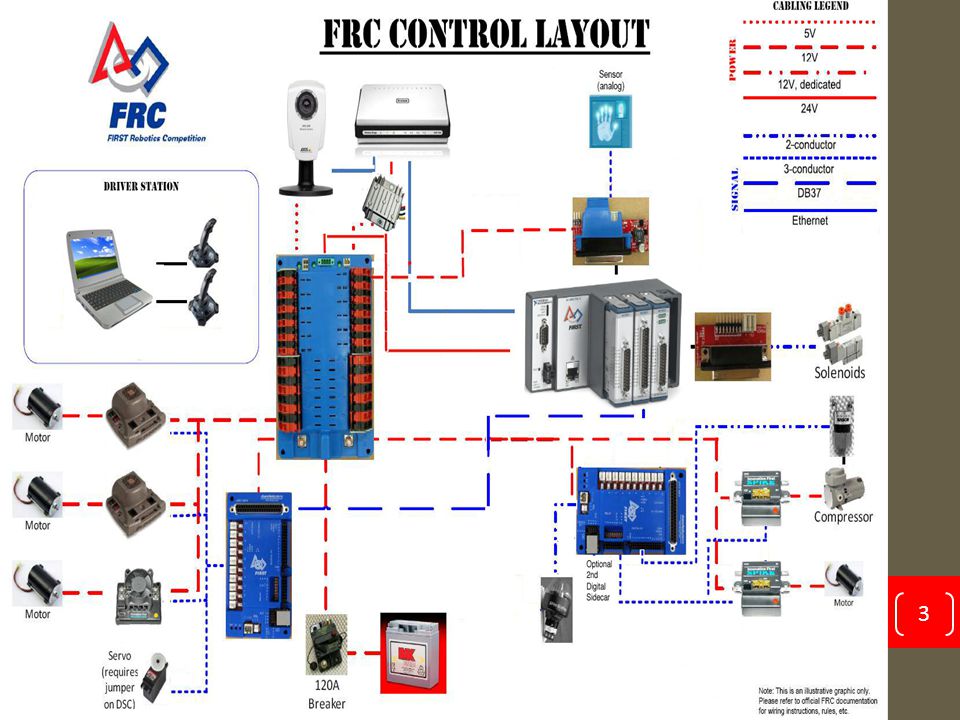
Electronics Monica Begnaud

4
Compact Rio (CRIO) Brain of the Robot
Is connected to the Dlink by Ethernet cable Outputs signals to the PD Board and Digital Sidecar Has different slots depending on what your robot does Ex: pneumatics

5
Dlink and Camera Dlink Router that the drive station connects to
Camera so the drivers can see from the robot’s perspective on the dashboard

6
Power Distribution (PD) Board
Connected to the CRio Send power out to the motor controls and the circuit breaker

7
Digital Sidecar Gets power from the PD board and signal from the CRio
Has signal outputs for the motor controls, servos, and the signal light

8
Jaguar (Jags) Motor controller
Motor Connections Motor controller Connected to the Sidecar with a PWM wire and to the PD Board Can control the amount of power sent to the motors Power Connections PWM Connections

9
Spikes Like a Jag, it’s a motor controller but it doesn’t vary the amount of power. It’s just on or off.

10
CIM Motors Connected to and controlled by the Jags Jag Connections

11
Types of Wires Power Wires PWM Wires

12
Breaker and Battery Battery connected to the breaker
Connections Battery connected to the breaker Breaker controls the power to the robot. Turn the breaker OFF before messing with any of the wiring!!! Power Button

14
Programming a FRC Robot
Cody Stafford

15
What is LabVIEW? Why Is programming important?
What Robotics programs use LabVIEW?

16
LabVIEW Programming basics
What is a VI? Robot Main.vi Begin.vi Autonomous.vi TeleOp.vi Finish.vi

17
‘Programming’ Flowchart
State hardware that will be used Hardware’s function and speed Decide controller layout Create a flowchart of the program

18
‘Programming’ Flowchart Example
You have a robot with two motors, two jags, a CRio, and an Xbox control. You want the motors to run at ½ speed whenever you hit forward on the right stick but that is all you want it to do

19
Example Flowchart

20
Group ‘Programming’ Flowchart
Get into your groups Decide on what hardware you are going to use Create a flowchart for the manipulator your team choose

Similar presentations






. Students should lead their teams in the building, design, and all other aspects of the robot. Knowledge of the Kit.>")











 MVRT. Main Circuit Breaker Connected to the red wire (power) of the battery When turned off, all power is cut off and robot.>")

 40 amp Circuits (4) (6) 20/30 amp Circuits (6)>")