Download presentation
Presentation is loading. Please wait.

1
Chap 4 Image Enhancement in the Frequency Domain

2
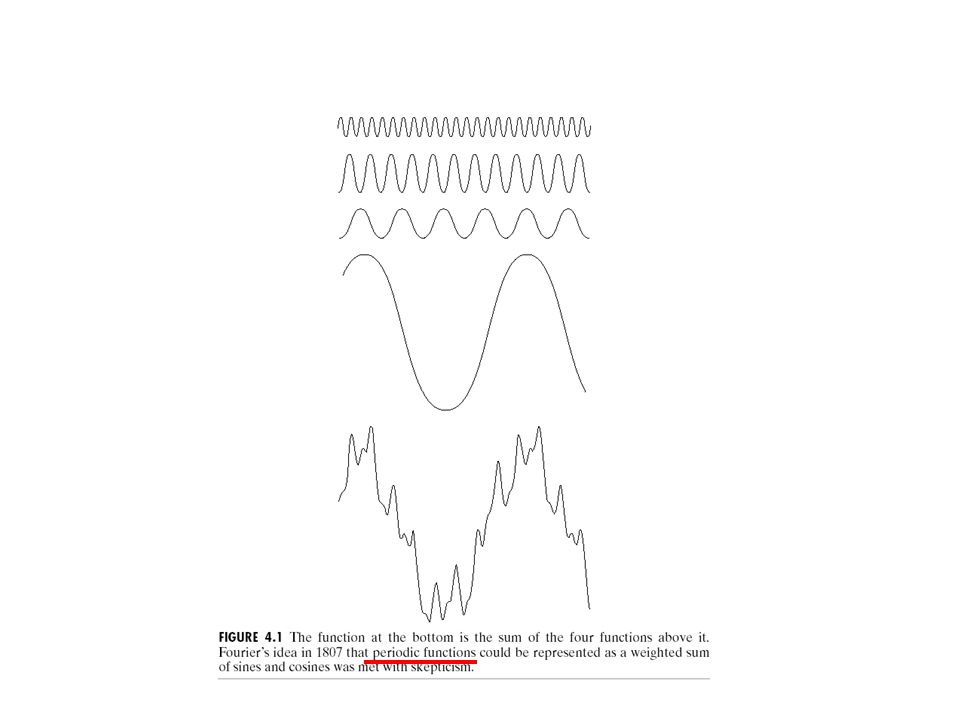
Background Any periodic function can be expressed as the sum of sines and cosines of different frequencies, each multiplied by a different coefficient. –We called this sum a Fourier series. Even function that are not periodic can be expressed as the integral of sines and cosines multiplied by a weighting function. –This formation is the Fourier transform.

4
Periodic Function A function f is periodic with period P greater than zero if –Af(x + P) = Af(x), where A denotes amplitude. f(x) = sinx, P = 2π, frequency=1/ 2π, A=1. f(x) = Asinnx, P = 2π/n, frequency=n/ 2 π. –n↑, frequency↑.
 = sinx, P = 2π, frequency=1/ 2π, A=1. f(x) = Asinnx, P = 2π/n, frequency=n/ 2 π. –n↑, frequency↑..")
5
Fourier Series Suppose f(x) is a function defined on the interval [-π,π]. The Fourier series expansion of f(x) is where an and bn are constants called the Fourier coefficients, and
![Fourier Series Suppose f(x) is a function defined on the interval [-π,π].](http://images.slideplayer.com/14/4225245/slides/slide_5.jpg "The Fourier series expansion of f(x) is where an and bn are constants called the Fourier coefficients, and.")
6
Coefficients of Any Period T = 2L Replace v by πx/L to obtain the Fourier series of the function ƒ(x) of period 2L
 of period 2L")
7
Complex Fourier Series Complex exponentials –According to Euler’s formula and so, Using these two equations we can find the complex exponential form of the trigonometric functions as

8
Complex Fourier Series

9
Continuous Spectra Consider the following function: –Only a single pulse remains and the resulting function is no longer periodic. A function which is not periodic can be considered as a function with very large period.

10
Continuous Spectra These two integrals form the conclusion of Fourier’s integral theorem.

11
Alternative Forms Note that there are a number of alternative forms for Fourier transform, such as –The third form is popular in the field of signal processing and communications systems.

12
4.2 Fourier Transform in the Frequency Domain Fourier transform F(u) of f(x) is defined as The inverse Fourier Transform is DFT for Discrete function f(x), x=0,1,..M-1 for u=0,1,..M-1 Inverse DFT
 of f(x) is defined as The inverse Fourier Transform is DFT for Discrete function f(x), x=0,1,..M-1 for u=0,1,..M-1 Inverse DFT")
13
Euler’s formula: Each term of the Fourier transform is composed of the sum of all values of the function f(x). –M 2 summations and multiplications –The values of f(x) are multiplied by sines and cosines of various frequencies. –The domain (values of u) over which the values of F(u) range is appropriately called the frequency domain, because u determines the frequency of the components of the transform. –Each of the M terms of F(u) is called a frequency component of the transform.
 are multiplied by sines and cosines of various frequencies. –The domain (values of u) over which the values of F(u) range is appropriately called the frequency domain, because u determines the frequency of the components of the transform. –Each of the M terms of F(u) is called a frequency component of the transform..")
14
Complex Spectra In general, the components of Fourier transform are complex quantities in the following form: F(u) = R(u) + jI(u) and can be written as F(u) = |F(u)|e j (u) The spectra is usually represented by the amplitude of a specific frequency Amplitude or spectrum of Fourier transform |F(u)| = (R 2 (u)+I 2 (u)) 1/2
 = R(u) + jI(u) and can be written as F(u) = |F(u)|e j (u) The spectra is usually represented by the amplitude of a specific frequency Amplitude or spectrum of Fourier transform |F(u)| = (R 2 (u)+I 2 (u)) 1/2")
15
Complex Spectra These complex coefficients couples –Amplitude spectrum value Magnitude of each of the harmonic components. –Phase spectrum value The phase of each harmonic relative to the fundamental harmonic frequency ω 0.

16
The frequency spectrum is centered at 0. To visual easily, we sometimes multiply f(x) by (-1) x before applying the transform.
 by (-1) x before applying the transform..")
17
Why (-1) x ?
 x")
18
4.2.2 The Two-dimensional Discrete Fourier Transform (DFT) 2D-DFT of f(x, y) of size M N Inverse 2-D DFT
 2D-DFT of f(x, y) of size M N Inverse 2-D DFT")
19
Modulation in the space domain F[(-1) x+y f(x, y)]= F(u-M/2,v-N/2) Shift the origin of F(u,v) to frequency coordinates (M/2, N/2), –the center of (u, v), u=0,…M-1, v=0,…N-1. –frequency rectangle Average of f(x,y) For real f(x,y) F(u, v) = F*(-u, -v) |F(u, v)| = |F(-u, -v)| –The spectrum of the Fourier transform is symmetric.
![Modulation in the space domain F[(-1) x+y f(x, y)]= F(u-M/2,v-N/2) Shift the origin of F(u,v) to frequency coordinates (M/2, N/2), –the center of (u, v), u=0,…M-1, v=0,…N-1.](http://images.slideplayer.com/14/4225245/slides/slide_19.jpg "–frequency rectangle Average of f(x,y) For real f(x,y) F(u, v) = F*(-u, -v) |F(u, v)| = |F(-u, -v)| –The spectrum of the Fourier transform is symmetric..")
20
Implementation

21
What is the “frequency” of an image? –Since frequency is directly related rate of change, it is not difficult intuitively to associate frequencies with pattern of intensity variations in an image. The low frequencies correspond to the slowly varying components of an image. The higher frequencies begin to correspond to faster and faster gray level changes in the image. –such as edges. –F(0, 0): the average gray level of an image. 4.2.3 Filtering in the Frequency Domain
: the average gray level of an image Filtering in the Frequency Domain.")
23
1)Multiply the input image by (-1) x+y to center the transform. 2)Compute DFT F(u, v) 3)Multiply F(u,v) by a filter function H(u,v) G(u,v) = F(u,v)H(u,v) 4)Computer the inverse DFT of G(u,v) 5)Obtain the real part of g(x,y) 6)Multiply g(x,y) with (-1) x+y Filtering steps:
Compute DFT F(u, v) 3)Multiply F(u,v) by a filter function H(u,v) G(u,v) = F(u,v)H(u,v) 4)Computer the inverse DFT of G(u,v) 5)Obtain the real part of g(x,y) 6)Multiply g(x,y) with (-1) x+y Filtering steps:.")
25
Notch filter: H(u,v) = 0 if (u,v) = (M/2, N/2), H(u,v) = 1 otherwise
 = 0 if (u,v) = (M/2, N/2), H(u,v) = 1 otherwise")
26
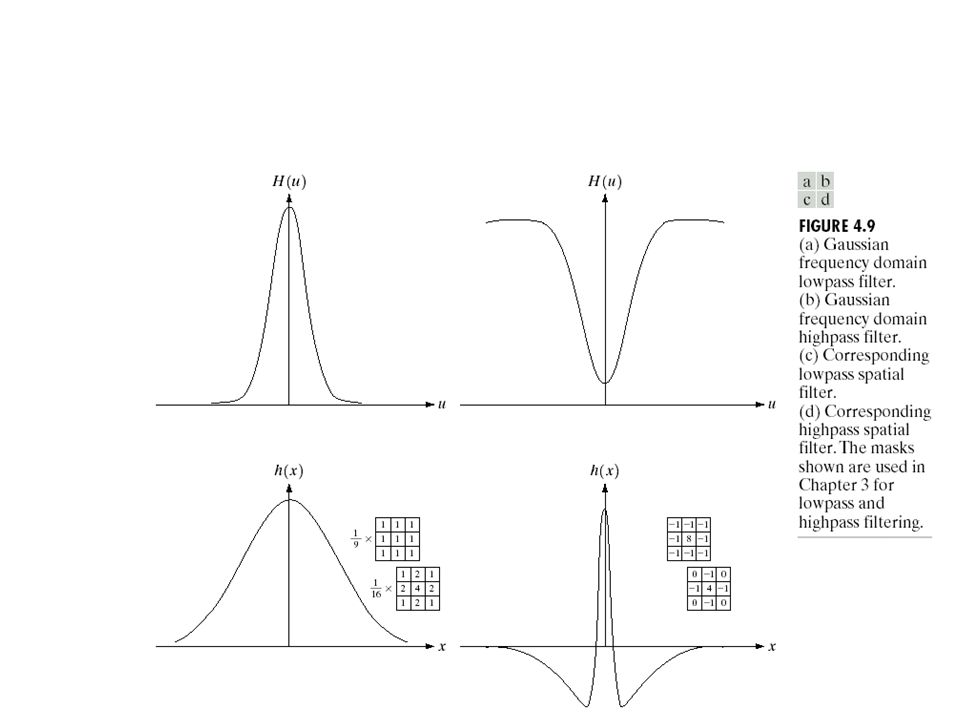
Lowpass filter Highpass filter

27
4.2.4 Filtering in spatial and frequency domains The discrete convolution f(x,y)*h(x,y) f(x,y)*h(x,y) F(u,v)H(u,v) f(x,y)h(x,y) F(u,v)*H(u,v)
*h(x,y) f(x,y)*h(x,y) F(u,v)H(u,v) f(x,y)h(x,y) F(u,v)*H(u,v)")
29
4.3 Smoothing Frequency-Domain Filters Frequency-Domain Filtering: G(u,v) = H(u,v)F(u,v) Filter H(u,v) –Ideal filter –Butterworth filter –Gaussian Filter
 = H(u,v)F(u,v) Filter H(u,v) –Ideal filter –Butterworth filter –Gaussian Filter")
30
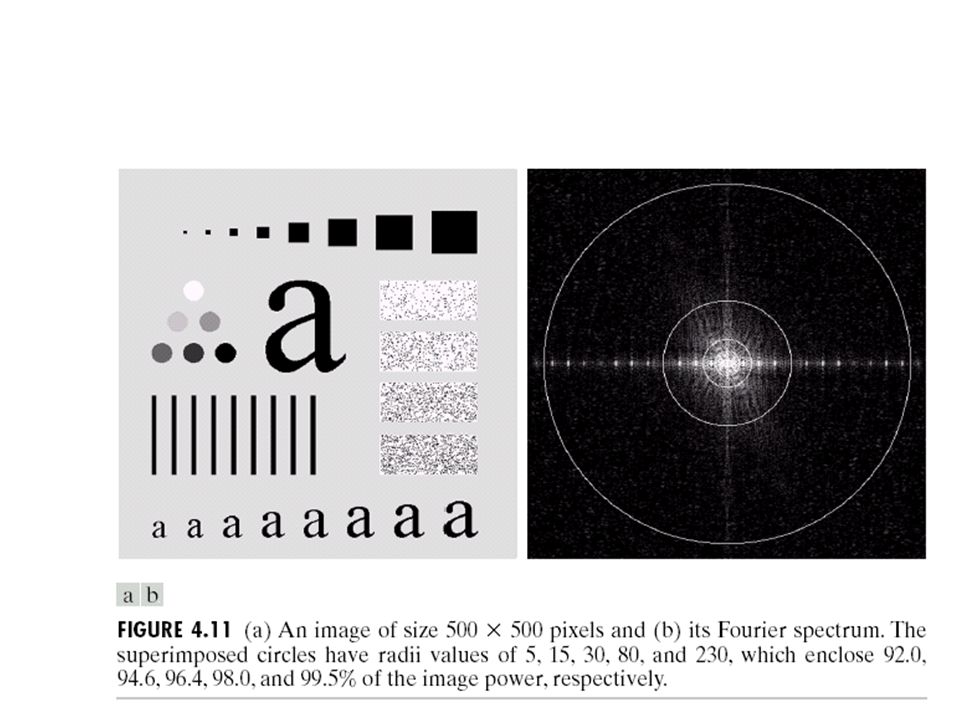
4.3.1 Ideal Low pass filter H(u,v) = 1 if D(u,v) D 0 = 0 if D(u,v) > D 0 The center is at (u,v)=(M/2, N/2) D(u,v)=[(u-M/2) 2 + (v-N/2) 2 ] 1/2 Cutoff frequency is D 0 Power estimate: The percentage α of power enclosed in the circle is:
![4.3.1 Ideal Low pass filter H(u,v) = 1 if D(u,v) D 0 = 0 if D(u,v) > D 0 The center is at (u,v)=(M/2, N/2) D(u,v)=[(u-M/2) 2 + (v-N/2) 2 ] 1/2 Cutoff frequency is D 0 Power estimate: The percentage α of power enclosed in the circle is:](http://images.slideplayer.com/14/4225245/slides/slide_30.jpg "4.3.1 Ideal Low pass filter H(u,v) = 1 if D(u,v) D 0 = 0 if D(u,v) > D 0 The center is at (u,v)=(M/2, N/2) D(u,v)=[(u-M/2) 2 + (v-N/2) 2 ] 1/2 Cutoff frequency is D 0 Power estimate: The percentage α of power enclosed in the circle is:")
33
The blurring in this image is a clear indication that most of the sharp detail information in the picture is contained in the 8% power removed by the filter. The result of α =99.5 is quite close to the original, indicating little edge information is contained in the upper 0.5% of the spectrum power.

35
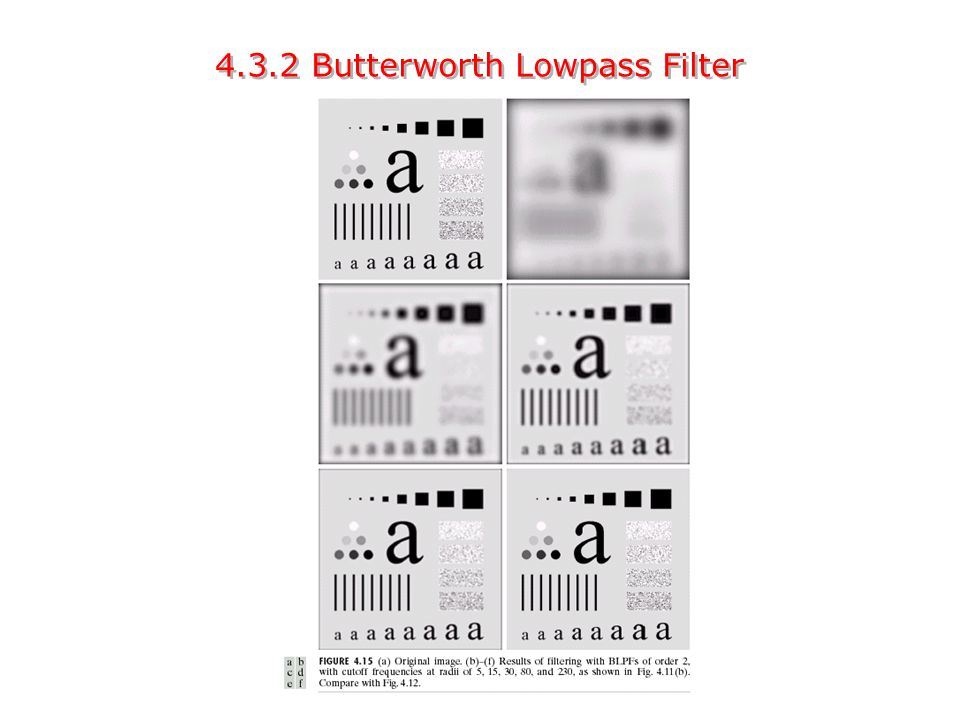
4.3.2 Butterworth Lowpass Filter Butterworth lowpass filter (BLPF) of order n At the frequency as an half of the cutoff frequency D 0, H(u, v)=0.5.
 of order n At the frequency as an half of the cutoff frequency D 0, H(u, v)=0.5.")
36
4.3.2 Butterworth Lowpass Filter

39
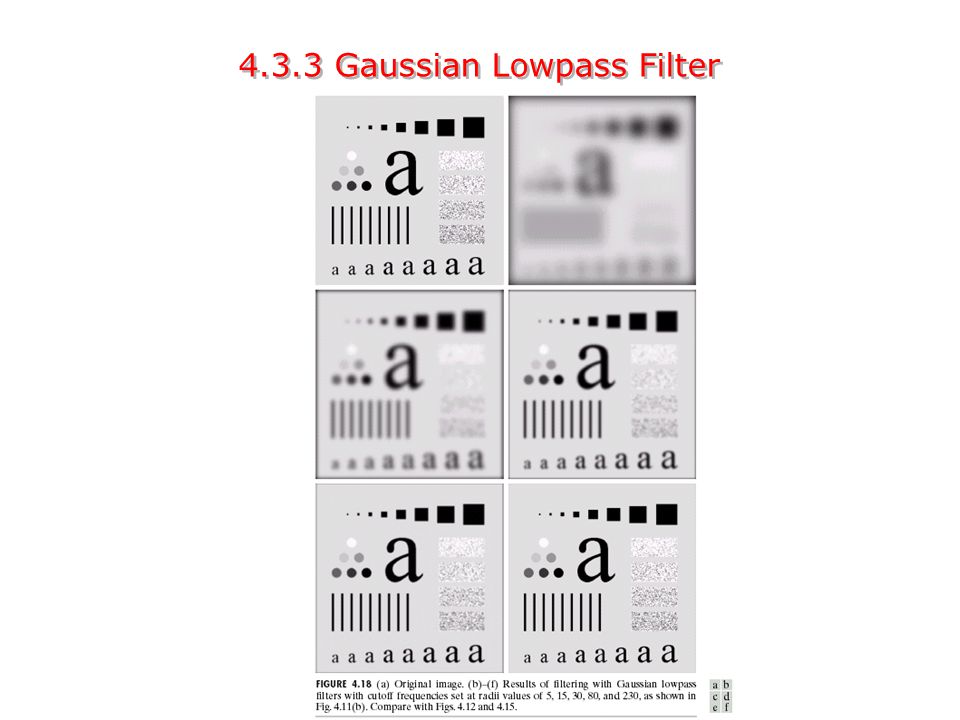
4.3.3 Gaussian Lowpass Filter Gaussian filter Let =D 0 When D(u, v)=D 0, H(u, v)=0.667
=D 0, H(u, v)=0.667")
40
4.3.3 Gaussian Lowpass Filter

42
4.3.4 Other Lowpass filtering examples

44
4.4 Sharpening Frequency-Domain Filter Highpass filtering: H hp (u,v)=1-H lp (u,v) Given a lowpass filter H lp (u,v), find the spatial representation of the highpass filter (1)Compute the inverse DFT of H lp (u,v) (2)Multiply the real part of the result with (-1) x+y
=1-H lp (u,v) Given a lowpass filter H lp (u,v), find the spatial representation of the highpass filter (1)Compute the inverse DFT of H lp (u,v) (2)Multiply the real part of the result with (-1) x+y")
45
4.4 Sharpening Frequency-Domain Filter

47
4.4.1 Ideal Highpass Filter H(u,v)=0 if D(u,v) D 0 =1 if D(u,v)>D 0 The center is at (u,v)=(M/2, N/2) D(u,v)=[(u-M/2) 2 +(v-N/2) 2 ] 1/2 Cutoff frequency is D 0
![4.4.1 Ideal Highpass Filter H(u,v)=0 if D(u,v) D 0 =1 if D(u,v)>D 0 The center is at (u,v)=(M/2, N/2) D(u,v)=[(u-M/2) 2 +(v-N/2) 2 ] 1/2 Cutoff frequency is D 0](http://images.slideplayer.com/14/4225245/slides/slide_47.jpg "4.4.1 Ideal Highpass Filter H(u,v)=0 if D(u,v) D 0 =1 if D(u,v)>D 0 The center is at (u,v)=(M/2, N/2) D(u,v)=[(u-M/2) 2 +(v-N/2) 2 ] 1/2 Cutoff frequency is D 0")
48
4.4.1 Ideal Highpass Filter

49
4.4.2 Butterworth Highpass Filter Butterworth filter has no sharp cutoff At cutoff frequency D 0 : H(u, v)=0.5
=0.5")
50
4.4.2 Butterworth Highpass Filter

51
4.4.3 Gaussian Highpass Filter Gaussian highpass filter (GHPF) Let =D 0
 Let =D 0")
52
4.4.3 Gaussian Highpass Filter

53
5.4 Periodic Noise Reduction by Frequency Domain Filtering Periodic noise is due to the electrical or electromechanical interference during image acquisition. Can be estimated through the inspection of the Fourier spectrum of the image.

54
Periodic Noise Reduction by Frequency Domain Filtering

55
5.4 Periodic Noise Reduction by Frequency Domain Filtering Bandreject filters –Remove or attenuate a band of frequencies. D 0 is the radius. D(u, v) is the distance from the origin, and W is the width of the frequency band.
 is the distance from the origin, and W is the width of the frequency band..")
56
Butterworth bandreject filter (order n) Gaussian band reject filter Butterworth and Gaussian Bandreject Filters
 Gaussian band reject filter Butterworth and Gaussian Bandreject Filters")
57
Bandreject Filters

58
Bandpass filter Obtained form bandreject filter H bp (u,v)=1-H br (u,v) The goal of the bandpass filter is to isolate the noise pattern from the original image, which can help simplify the analysis of noise, reasonably independent of image content.
=1-H br (u,v) The goal of the bandpass filter is to isolate the noise pattern from the original image, which can help simplify the analysis of noise, reasonably independent of image content.")
59
Result of The BandPass Filter

60
5.4.3 Notch filters Notch filter rejects (passes) frequencies in predefined neighborhoods about a center frequency. where

61
Butterworth notch filter Gaussian notch filter Note that these notch filters will become highpass when u 0 =v 0 =0 5.4.3 Notch filters

62
Notch filters

63
Example 5.8 Use 1-D Notch pass filter to find the horizontal ripple noise

Similar presentations







>")


>")



>")

 Image processing (spatial &frequency domain) College of Science Computer Science Department 2013-2014 E-mail:>")




![Reminder Fourier Basis: t [0,1] nZnZ Fourier Series: Fourier Coefficient:](/16/4936498/big_thumb.jpg "Reminder Fourier Basis: t [0,1] nZnZ Fourier Series: Fourier Coefficient:>")




