Download presentation
Presentation is loading. Please wait.

1
Topic 8. Gamma Camera (II)
Basic Performance Characteristics Detector Limitations Design and Performance Characteristics of Parallel-Hole Collimators Performance Characteristics of Converging, Diverging, and Pinhole Collimators Measurements of Gamma Camera Performance.

2
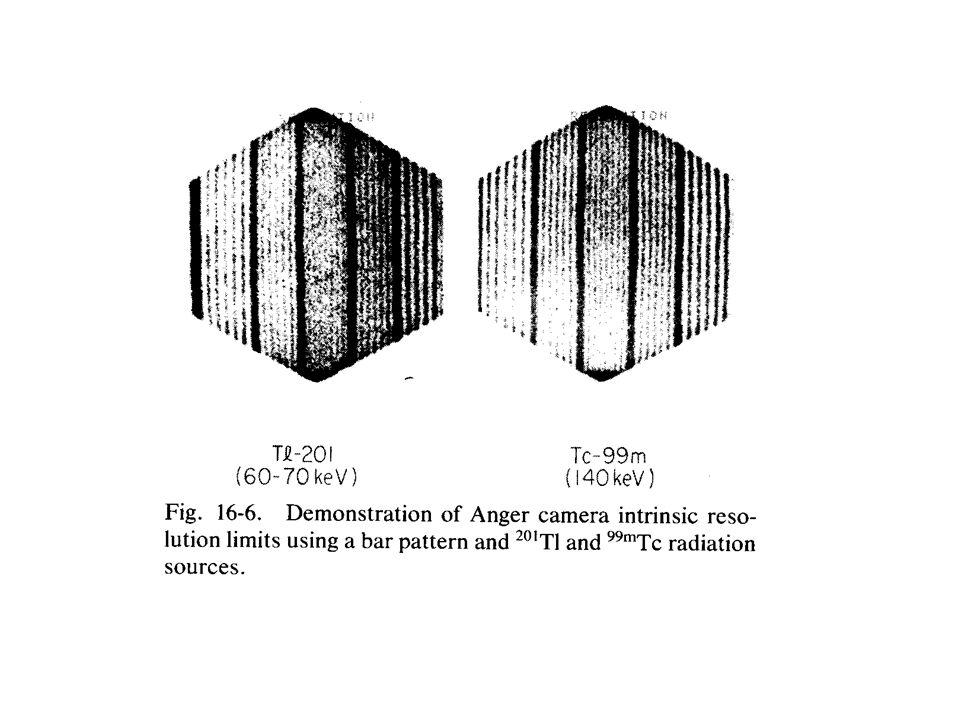
Intrinsic Spatial Resolution Limits
Intrinsic spatial resolution refers to the limit of spatial resolution achievable by the detector and the electronics Intrinsic spatial resolution is limited primarily by two factors: multiple scattering and statistical fluctuation in the distribution of light photons (the later is the main factor). Intrinsic resolution depends on detector crystal thickness and γ ray energy. A thinner crystal is used for Anger camera to achieve better spatial resolution. Larger number of PM tubes and improvement of light collection efficiency result in better resolution.
. Intrinsic resolution depends on detector crystal thickness and γ ray energy. A thinner crystal is used for Anger camera to achieve better spatial resolution. Larger number of PM tubes and improvement of light collection efficiency result in better resolution.")
3
Intrinsic Resolution vs Photon Energy

4
Intrinsic Resolution vs Crystal Thickness

6
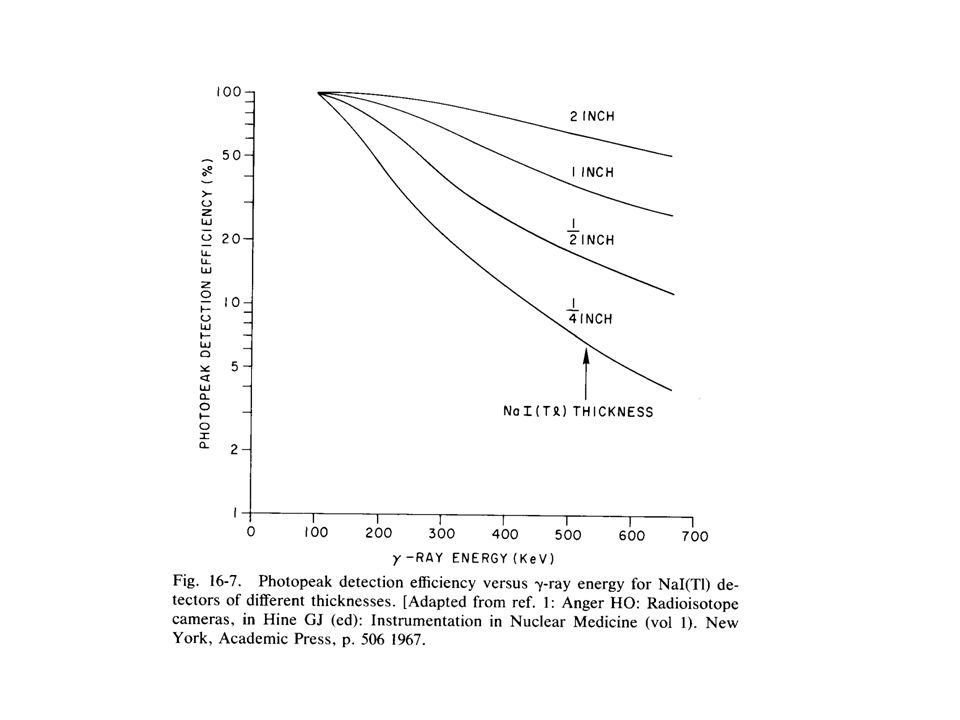
Detection Efficiency The crystal thickness of NaI(Tl) in Anger camera is smaller (6-12mm) than that of a well counter (2-5cm). Anger camera is designed for optimal detection of γ ray energies of keV.

8
Energy Resolution

9
Problems at High Counting Rates
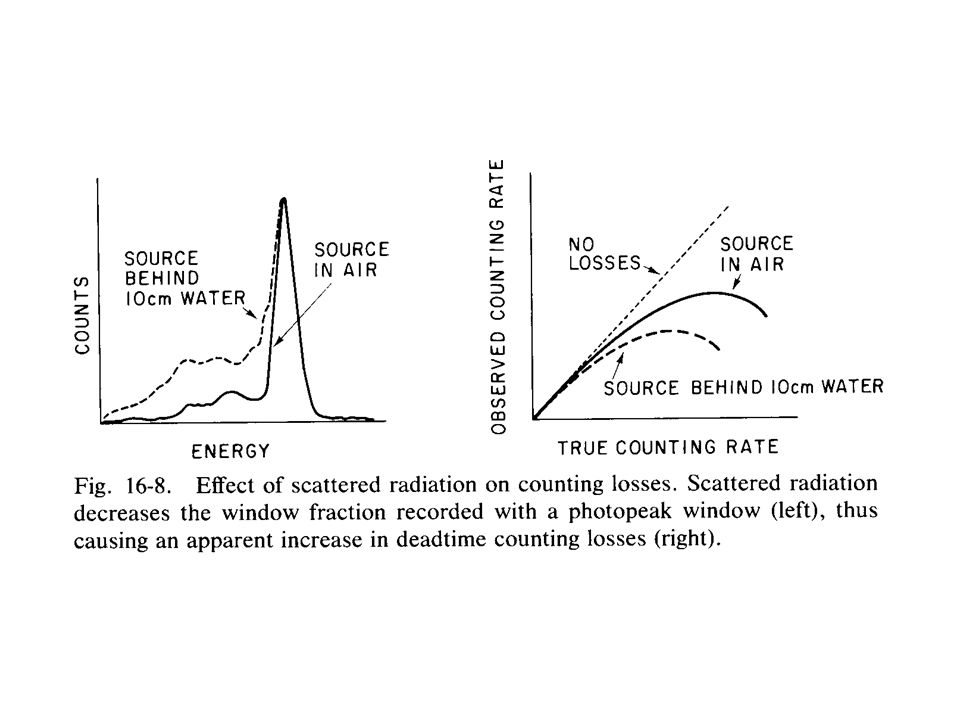
Pulse pile-up is the problem at high count rate and it results in count loss and image distortion. Count loss depends on the whole energy spectrum but the apparent dead-time depends on the window fraction. Scatter causes narrower of the window fraction therefore longer dead-time.

11
Problems at High Counting Rates
Pulse pile-up causes image distortion. Two scattered event may be added to form a photo-peak which produces a location between the two scattered events.

12
Problems at High Counting Rates
The general effect of the pulse pile-up is to cause a loss of image contrast and details

13
Problems at High Counting Rates
Pulse pile-up rejection circuit can be used to improve the pulse pile-up but it will reduce the maximum achievable count rate Deadtime can be improved by shortening the effective charge integration time for the output signal from the PM tube but it will reduce the amount of light collected by the PM tube, therefore, degrade the intrinsic resolution.

14
Problems at High Counting Rates
Count rate performance should be one of the important factors for Anger cameras

15
Pulse Pile-up Correction

16
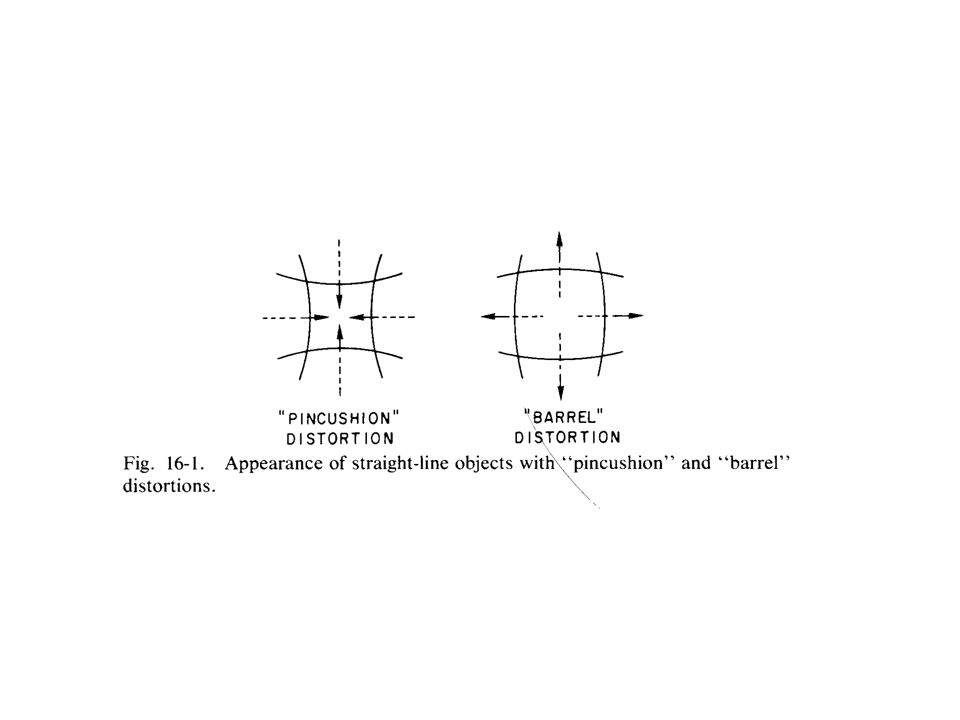
Image Non-Linearity Non-linearity refers to that a straight line object appear as curved line image Non-linearity occurs when the X and Y positional signals do not change linearly with the displacement distance. “Pincushion” distortion is an inward “bowing” image and “Barrel” distortion is an outward “bowing” image A PM tube may have high light collection efficiency in the centre which may result in a “pincushion” in the centre and “barrel” between PM tubes. This kind of images could results in a “wavy” line pattern.

19
Nonlinearity Example

20
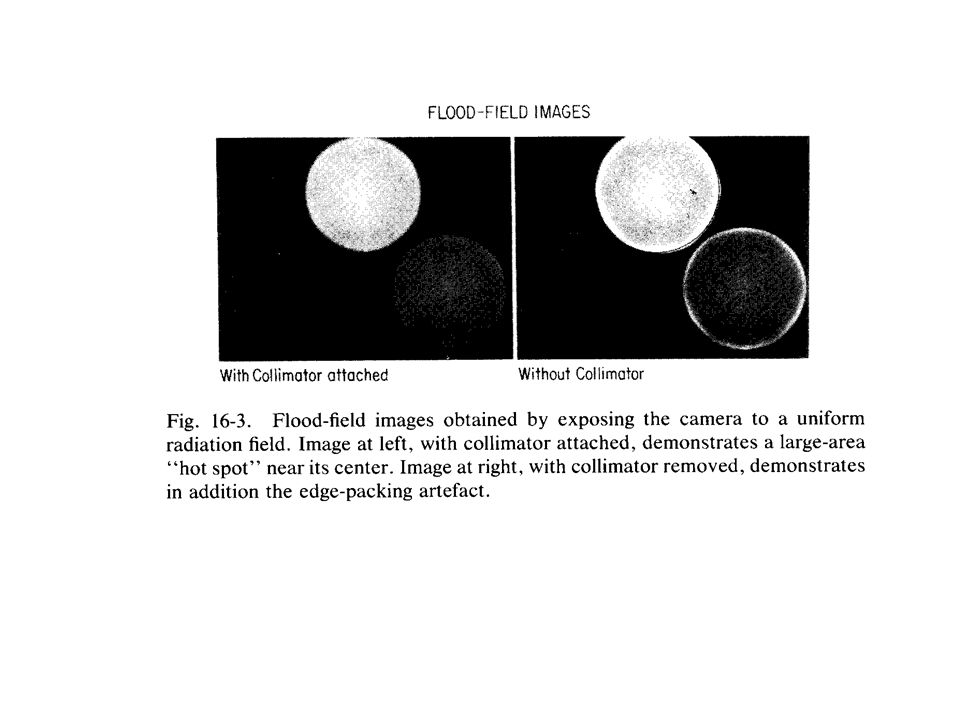
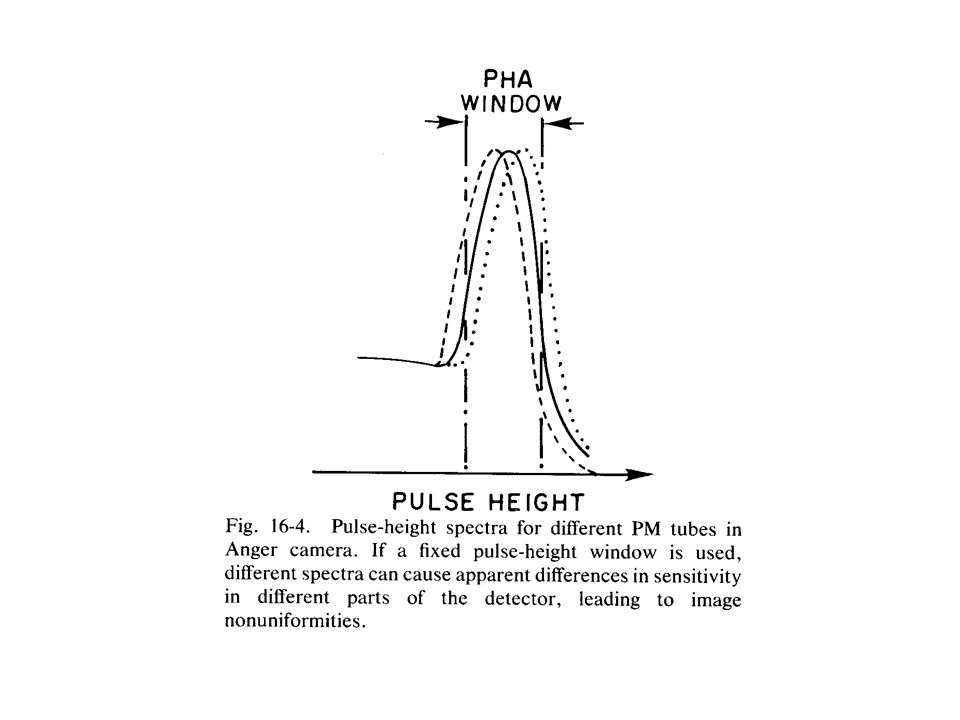
Image Non-Uniformity Non-Uniformity refers to the intensity variation from a uniform flood source The causes could be the non-uniform detection efficiency (small differences in pulse height spectrum) and non-linearity of PM tubes (more server) or instrument malfunctions. “Edge packing” refers to the bright ring around the edge of the image. It is caused by the internal light reflection of the detector crystal. “Edge packing” is usually masked and the useful field of view is smaller than the actual detector size
 and non-linearity of PM tubes (more server) or instrument malfunctions. Edge packing refers to the bright ring around the edge of the image. It is caused by the internal light reflection of the detector crystal. Edge packing is usually masked and the useful field of view is smaller than the actual detector size.")
24
Non-Uniformity Correction Techniques
Cosmetic approach: Adjust individual PM tube gains (compensate for the detection efficiency difference) “Correction factors” matrix. Test image is normalised and the correction factor for each matrix element is used to add or subtract from the image. Advanced approach: A set of microprocessors are used to store correction matrices for regional differences in pulse height spectra and for position distortion. Images are corrected on event by event basis (on fly).
 Correction factors matrix. Test image is normalised and the correction factor for each matrix element is used to add or subtract from the image. Advanced approach: A set of microprocessors are used to store correction matrices for regional differences in pulse height spectra and for position distortion. Images are corrected on event by event basis (on fly).")
25
Non-uniformity Correction Example

26
Uniformity Profiles

27
Gamma Camera Tuning

28
Design and Performance Characteristics of Parallel Hole Collimators
Basic limitations in collimator performance Septal thickness Geometry of collimator holes System resolution

29
Basic Limitation in Collimator Performance
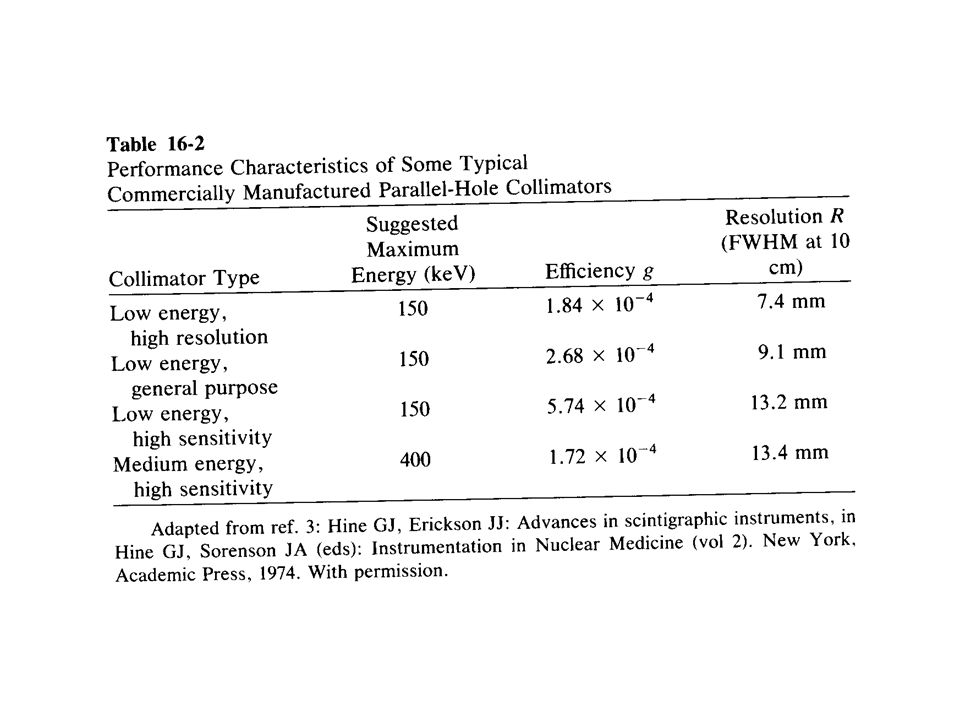
Collimator is a limiting factor in camera system performance. Collimator resolution refers to the sharpness or details of the γ ray image projected onto the detector --- worse than the intrinsic resolution. Collimator efficiency refers to the fraction of γ rays that pass through it -- a few percent or less.

30
Septal Thickness Septal thickness is designed to prevent γ rays from penetrating from one hole to another (allow less than 5% to pass through). Septal thickness should be as small as possible in order to gain maximum efficiency High atomic number and density material should be used (lead is the choice)
")
31
Septal Thickness The required thickness t=2dw/(l-w) where (t/w)=(2d+t)/l if θ is small If 5% penetration is allowed, t>[6d/μ]/[l-(3/ μ)] because e-μw<0.05 therefore μw>3
] because e-μw<0.05 therefore μw>3.")
32
General Comments The septal thickness depends on the γ ray energies to be used because μ depends on the γ ray energy. Energy ranges in nuclear medicine are often classified as: low energy <150keV; medium energy <400keV and high energy <1Mev. Low energy collimators are generally fragile because they are only a few tenth of mm. Low energy collimators are used whenever possible to obtain maximum collimator efficiency (“foggy” background may be superimposed on the image for high energy).
.")
33
Geometry of Collimator Holes
The performance of a collimator is affected by its shape, length and diameter (round or hexagonal are the best) Spatial resolution and detection efficiency are the two important performance parameters Collimator spatial resolution is defined as the FWHM of the radiation profile from a point or line source of radiation projected by the collimator onto the detector.
 Spatial resolution and detection efficiency are the two important performance parameters. Collimator spatial resolution is defined as the FWHM of the radiation profile from a point or line source of radiation projected by the collimator onto the detector.")
34
Collimator Resolution
A parallel holes collimator resolution is given by Rc=[d(le+b)]/le where le =l-2μ-1 is the effective collimator length (taking into account of the γ ray penetration)
]/le where le =l-2μ-1 is the effective collimator length (taking into account of the γ ray penetration)")
35
Collimator Resolution (2)
Spatial resolution of a parallel collimator increases (worse) as the distance between the collimator and the source increased
 as the distance between the collimator and the source increased.")
36
Collimator Efficiency
The detection efficiency is given by g=K2(d/le)2[d2/(d+t)2] where K is a constant that depends on the holes shape. The first part is the geometric factor (solid angle subtended by a collimator hole) and the second part is the fraction that is not covered by the septa (the area ratio of the holes and total detector).
2[d2/(d+t)2] where K is a constant that depends on the holes shape. The first part is the geometric factor (solid angle subtended by a collimator hole) and the second part is the fraction that is not covered by the septa (the area ratio of the holes and total detector).")
37
Collimator Efficiency
Collimator efficiency for a source in air is independent of source-to-collimator distance b.

38
Collimator Efficiency
Invariance of collimator efficiency with source to collimator distance applies to point sources, line sources and uniform sheet source in air with parallel hole collimators.

39
Resolution and Efficiency
The relationship between the resolution and efficiency is gœRc2 For a given septal thickness, collimator resolution is improved only at the expense of decreased collimator efficiency and vice versa.

41
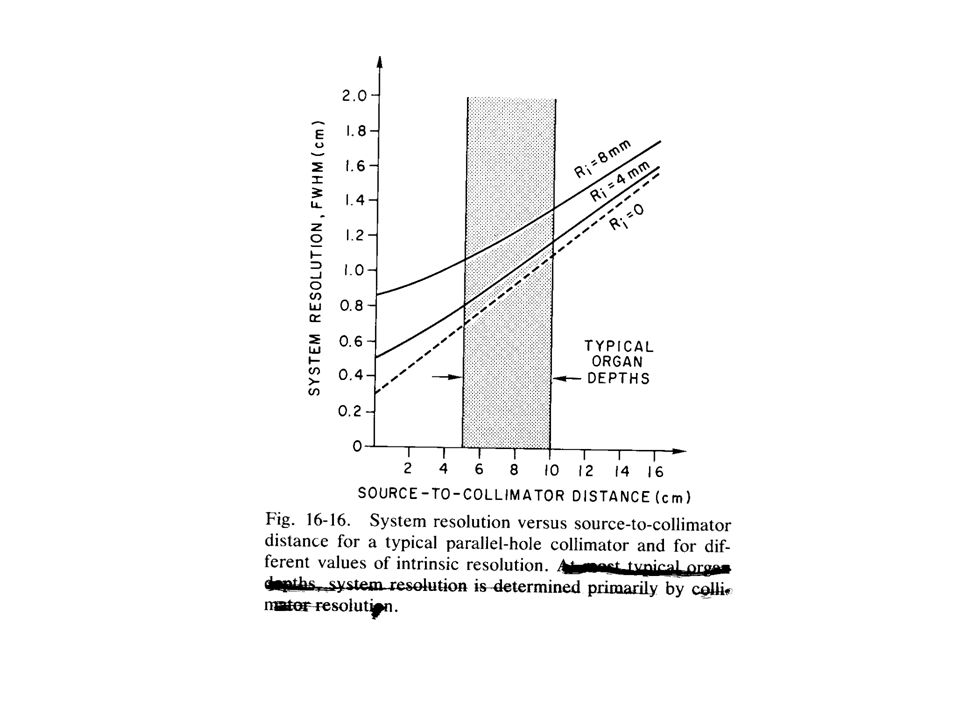
System Resolution System resolution depends on a number of factors such as, scattering, septal penetration, intrinsic resolution and collimator resolution with the collimator and intrinsic resolutions are the main factors. System resolution (consider intrinsic and collimator only) can be expressed as Rs2=Ri2+Rc2 System resolution is determined primarily by collimator resolution.
 can be expressed as Rs2=Ri2+Rc2. System resolution is determined primarily by collimator resolution.")
43
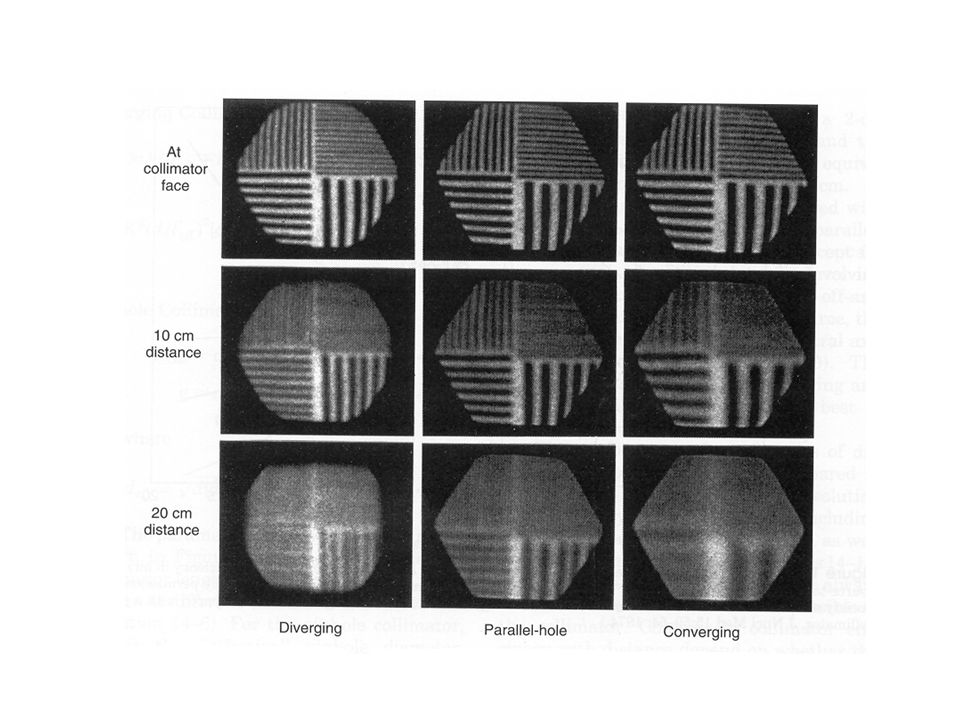
Performance Characteristics of Converging, Diverging and Pinhole Collimators

44
Performance Characteristics of Converging Collimator

45
Performance Characteristics of Diverging Collimator

46
Performance Characteristics of Pinhole Collimator

47
Performance Characteristics of Converging, Diverging and Pinhole Collimators

48
Some Comments Resolution always is best with the source as close as possible to the collimator For point source in air, the efficiency increases as the source to collimator distance increase with converging collimator (maximum at focus point) and decreases for diverging and pinhole collimators. No change for flood source as long as the source cover the entire detector. Diverging, converging and pinhole collimators may be useful for the change of field of view but the image distortion caused by the magnification with depth may be a problem.
 and decreases for diverging and pinhole collimators. No change for flood source as long as the source cover the entire detector. Diverging, converging and pinhole collimators may be useful for the change of field of view but the image distortion caused by the magnification with depth may be a problem.")
50
Measurements of Gamma Camera Performance
Intrinsic Resolution System Resolution Spatial Linearity Uniformity Counting Rate Performance Energy Resolution System Sensitivity

Similar presentations