Download presentation
Presentation is loading. Please wait.

1
All-Terrain Walker Angel Hambrecht, Justin Kibler, Nate Watts, Maxine Laroche, Kurtis Unruh-Kracke, and Tatiana Ferrucio Ferreira

2
Agenda Problem Statement Customer/Engineering Requirements Risk Management Final Design Torque Calculations Final Design Subsystems Wheels Hand Drive System Casters Frame Adjustability Brakes Foldability Seat/Footpegs Test Plans BOM Manufacturing Plan MSD II Schedule

3
Problem Statement - Overview Current State Existing posterior walkers cannot handle rough terrain Desired State Assist the user to navigate soft or changing ground conditions Travel over obstacles that are found on a hiking trail Project Goals Maintain user independence Identify Opportunities easier to use more durable cost cheaper than current ruggedized walkers

4
Customer/Engineering Requirements

5
Risk Management

7
Torque - Calculations Governing Equations: Inclines: Flat Surfaces: Power to Torque: Coefficients: Type of Surface Friction (μ) Rolling (c r ) Grass 0.350.004 Pavement 0.750.008 Gravel 0.60.02 Sand 0.60.3 Ice 0.080.014 Mud 0.550.08 Hard Packed Snow 0.150.016
 Rolling (c r ) Grass Pavement Gravel Sand Ice Mud Hard Packed Snow")
8
Torque - Results

9
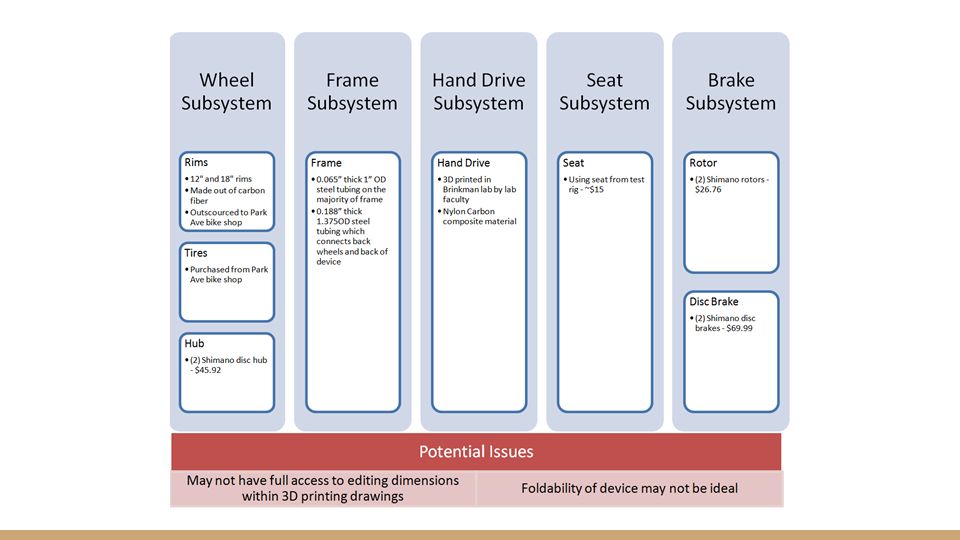
Wheels / Tires 18” tube mountain bike wheels 12” tube wheels on casters Rims and hubs will be purchased and custom fitted for the larger rear wheels to allow disc brake rotor mounting. Aggressive treaded tires for rough conditions - can be switched out based on terrain

10
Hand Drive System 3D printed in Brinkman Lab Gears printed with new carbon fiber technology for strength and durability 1.4 gear ratio to make operation easier Removable for storage / transport

11
Casters Modified from preliminary design to have a slimmer profile and weigh less. 360 degree range of motion Anti-swivel lock

12
Frame Modified from previous design for greater stability Added handle adjustability and foldability Steel chosen over aluminum due to increased strength with minimal weight gain

13
Adjustability 1” handle height adjustments 27.5” to 39.5” (comparable to our customers current walker adjustability)
")
14
Brakes Rotor mounted directly to custom hubs Custom bracket mounted to frame to secure caliper Two brake handles go to each caliper

15
Foldability Handles retract to shortest setting Handles fold in Seat folds up Front wheels fold in

16
Seat / Footpegs Weather resistant, cushioned plastic seat A T-bar foot rest will fold out from under the seat and lock in place.

23
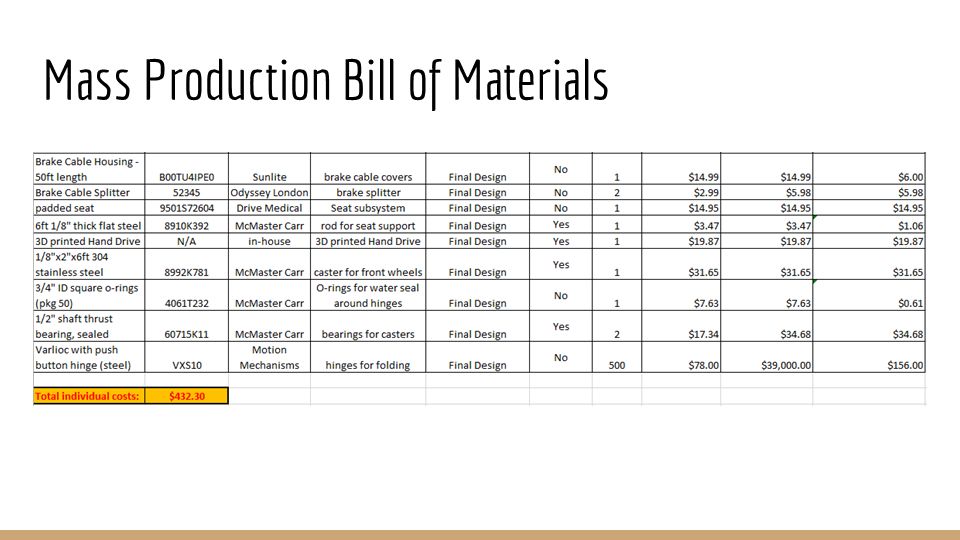
Bill of Materials Previous BOM for single prototype is still mostly unchanged - total cost to group should be roughly $820 for both prototype and deliverable. A major changing point was a decrease in the cost of the hand crank, but we now have custom wheels for the brake assembly. A mass production cost was created, and the total cost to buy raw materials along with production cost is $432 per unit.

25
Mass Production Bill of Materials

27
MSD 2 Plan Overview

28
Questions?

Similar presentations



 1-855-KTRACKS.>")







 Jeffery Flowerday (ME) Jonathan Nguyen (ME) Kassandra Schlott (IE)>")








