Download presentation
Presentation is loading. Please wait.

1
Chapter 6 Analysis of Feedback Control Systems Prof. Shi-Shang Jang Chemical Engineering Department National Tsing-Hua University Hsin Chu, Taiwan June, 2015

2
6-1 Introduction Given a plant with a transfer function of y(s)/m(s)=G p (s), a controller is implemented with a transfer function of G c (s), the system hence becomes a closed loop function. It is very convenient to analyze the closed loop system in s-domain since only algebraic equations are involved. In a closed loop system, there are two inputs for the system, the set point (servo) of the output and the disturbances (regulation) that affect the output.
 of the output and the disturbances (regulation) that affect the output..")
3
6-1 Introduction – Cont. Variations in outlet temperature are sensed by the sensor-transmitter and sent to the controller causing the controller output signal to vary. This is in turn causes the control valve position and consequently the steam flow To vary. The variations in steam flow cause the outlet temperature to vary, thus completing the loop.

4
Example: The Heat Exchanger System

5
6-1.1 Closed-Loop Transfer Function

6
6-1.1 Closed-Loop Transfer Function - Continued Z=Output Z i =Input f =product in forward path from Z i to Z l =product of every transfer function in feedback loop

7
6-1.1 Closed-Loop Transfer Function - Continued

8
Example

9
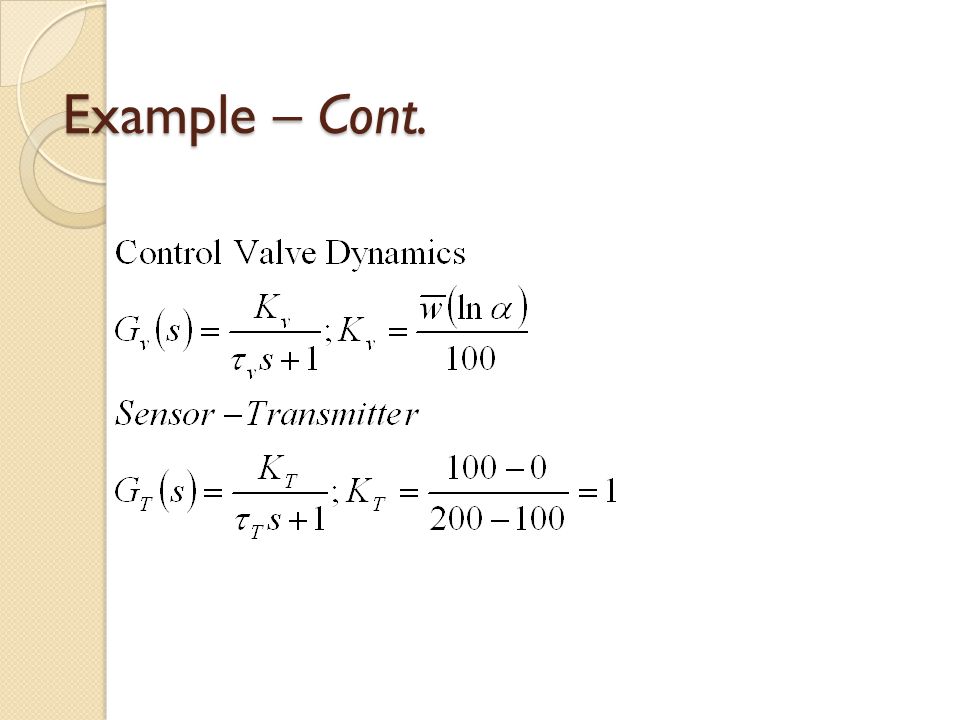
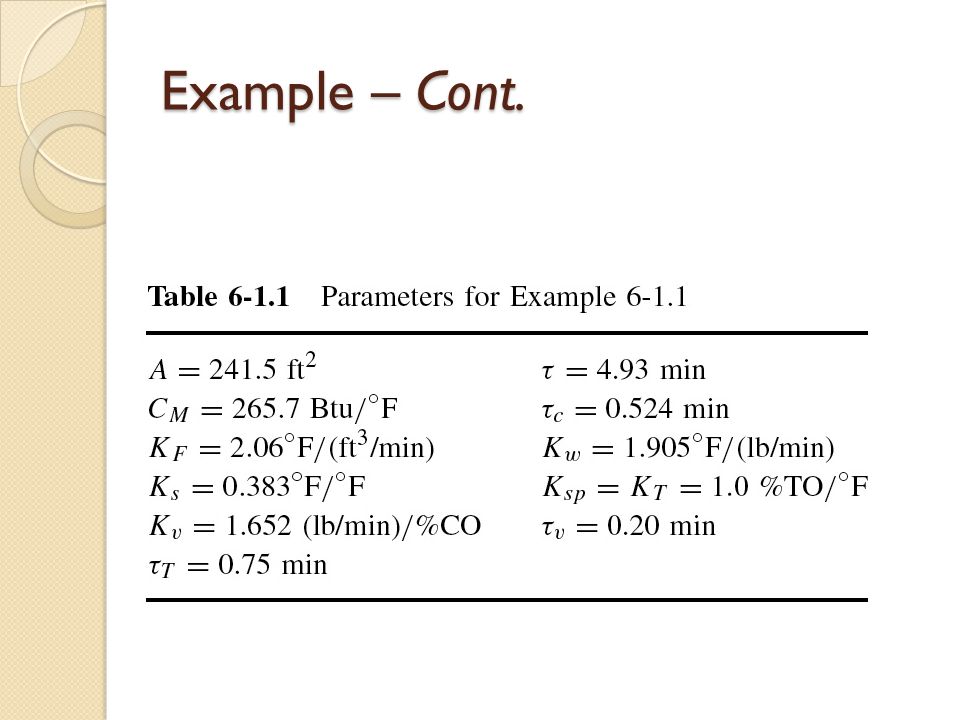
Example – Cont.

14
6-1.1 Closed-Loop Transfer Function - Continued

15
Example – Cont.

16
6.1.3 Steady State of Closed Loop Systems

17
Example

18
Example: New steady state of the heating tank 1. Servo control with Kc=1; T set =1 2. Regulation Control with F=1

19
Example: Flow rate control system

20
Example: Flow rate control system – Cont.

21
6.1.2 Characteristic Equation of the Loop

22
Example : Servo Problem for a First Order System Proportional only

23
6.1.3 Steady State of Closed Loop Systems Proposition 6-1 : The closed loop dynamics of a first order system with a P-only controller behaves the same with another first order system, with a gain of K OL /(1+ K OL ) and time constant of /(1+ K OL ) for the servo problem.
 and time constant of /(1+ K OL ) for the servo problem.")
24
6.1.3 Steady State of Closed Loop Systems– Cont. Corollary 6-1 : A P-only controller applied to a first order system can yield perfect control if K c for a servo problem. Proof: Consider (6-1), in case, we have K 1 1, and 1 0. Corollary 6-2 : Assume that a step change with a magnitude of A at the set point T set (s) is implemented to a P-only controller applied to a first order system, then the offset of the controller is A/(1+K OL ). Proof: Let T set =A/s, then T o (s)=(A/s)[K 1 / ( 1 s+1)], we have: offset =
, in case, we have K 1 1, and 1 0. Corollary 6-2 : Assume that a step change with a magnitude of A at the set point T set (s) is implemented to a P-only controller applied to a first order system, then the offset of the controller is A/(1+K OL ). Proof: Let T set =A/s, then T o (s)=(A/s)[K 1 / ( 1 s+1)], we have: offset =.")
25
6.1.3 Steady State of Closed Loop Systems– Cont. KcKc 11 K1K1 11.670.667 210.8 55/1110/11

26
6.1.3 Steady State of Closed Loop Systems– Cont. Regulation problem (disturbance rejection) using a P-only control for a first order system:
 using a P-only control for a first order system:.")
27
6.1.3 Steady State of Closed Loop Systems– Cont. Corollary 6-3 : A P-only controller applied to a first order system can yield perfect control if K c for a regulation problem. Corollary 6-4 : Assume that a step change with a magnitude of A at the load F(s) is implemented to a P-only controller applied to a first order system, then the offset of the controller is.
 is implemented to a P-only controller applied to a first order system, then the offset of the controller is..")
28
6.1.3 Steady State of Closed Loop Systems– Cont. KcOffset 1-0.124 2-0.077 5-0.036 level time Kc=1 Kc=2 Kc=5

29
6.1.3 Steady State of Closed Loop Systems– Cont. Proposition 6-2 : The offset of closed loop dynamics of a first order system with a PI controller results zero offset. Proof:

30
6-2 Stability of the Control Loop

31
6-2.1 Stability Criterion Proposition 6-3: For a feedback control loop to be stable, all of the roots of its characteristic equation must be either negative real number or complex numbers with negative real parts. Corollary 6-4: For a feedback control loop to be stable, all of the roots of its characteristic equation must fall on the left-hand half of the s plane, also known as the “left-hand plane” (LHP).
..")
32
6-2.1 Stability Criterion - Example KcKc p1p1 p2p2 p3p3 0-3-2 0.23-3.1-1.75-1.15 0.39-3.16-1.42* 1.58-3.45-1.28-0.75j-1.28+0.75j 6.6-4.11-0.95-1.75j-0.95+1.75j 26.5-5.1-0.45-2.5j-0.45+2.5j 60*-6.00-3.32j*0+3.32j* 100-6.720.35-4j0.35+4j Or Characteristic equation can be derived:

33
6-2.1 Stability Criterion - Example

34
6-2.1 Stability Criterion – Cont. Consider the previous example, at K c =0.39, the system becomes oscillatory, at K c =60, the system becomes unstable. At this point, we term the controller gain that makes the closed loop system unstable the ultimate gain (K u =60) of the system, the frequency ( u =3.32) that the system oscillates is termed the ultimate frequency. Problem: Given the characteristic equation C(s, K c )=0, what is the ultimate gain and ultimate frequency of the system? Answer: Direct substitution, Routh array, Root Locus
 of the system, the frequency ( u =3.32) that the system oscillates is termed the ultimate frequency. Problem: Given the characteristic equation C(s, K c )=0, what is the ultimate gain and ultimate frequency of the system. Answer: Direct substitution, Routh array, Root Locus.")
35
6-2.2 Method of Direct Substitution – Cont. Basic idea: Consider the characteristic equation C(K c,s)=0, in case of ultimate gain, i.e. K c =K u, then the root of the equation should be located at the imaginary axis, i.e. s=j . The problem of solving the ultimate condition, hence changed into C(K c,s)=R(K c, )+jI(K c, )=0, i.e. R(K c, )=0, I(K c, )=0 (two unkowns, two equations) Problem: many algebraic work invloved.
=0, in case of ultimate gain, i.e. K c =K u, then the root of the equation should be located at the imaginary axis, i.e. s=j . The problem of solving the ultimate condition, hence changed into C(K c,s)=R(K c, )+jI(K c, )=0, i.e. R(K c, )=0, I(K c, )=0 (two unkowns, two equations) Problem: many algebraic work invloved..")
36
6-2.2 Method of Direct Substitution – Cont.

38
6-2.3 Effect of Parameters

39
6-2.3 Effect of Parameters – Cont.

40
6-2.4 Effect of Dead Time – Pade Approximation

41
6-2.4 Effect of Dead Time – Pade Approximation – Cont.

42
Homework Text, page 220 6-1, 6-3, 6-5, 6-10, 6-12, 6-18, 6-20, 6-25

43
Example The temperature of a tank is controlled by adjusting the steam flow to the jacket of the tank. The temperature transmitter has a span of 100°F and is set between 100 and 200°F. The proportional controller is set at a proportional band of 20. The normal pressure to the valve is 8 psig and the valve is air to open type. The normal temperature of the tank is 170°F and the normal feed temperature is 65°F. The set point is moved from 170°F to 175°F. And the tank eventually comes to a steady state of 174.1°F. ◦ (i) What is the offset? ◦ (ii) What is the pressure to the valve in the final steady state? ◦ (iii) What is the process gain? (Assume the valve gain is unity) ◦ (iv) What will be the offset if the proportional band was changed to 10?
 What is the offset. ◦ (ii) What is the pressure to the valve in the final steady state. ◦ (iii) What is the process gain. (Assume the valve gain is unity) ◦ (iv) What will be the offset if the proportional band was changed to 10 .")
44
Solution

Similar presentations













>")







 m x(t) fd(t) LINEAR CONTROL C (Ns/m) k (N/m)>")
