Download presentation
Presentation is loading. Please wait.

1
State-Space Models Date: 24 th July 2008 Prepared by: Megat Syahirul Amin bin Megat Ali Email: megatsyahirul@unimap.edu.my

2
Introduction State-Space Model Signal Flow Graph

3
The basic questions that will be addressed in state-space approach include: i. What are state-space models? ii. Why should we use them? iii. How are they related to the transfer function used in classical control system? iv. How do we develop a space-state model?

4
A representation of the dynamics of N th -order system as a first-order equation in an N-vector, which is called the state. Convert the Nth-order differential equation that governs the dynamics of the system into N first- order differential equation.

5
The state of a system is described by a set of first-order differential equations written in terms of the state variable.

6
In a matrix form, we have: State vector:

7
Input equation Output equation

8
Example: Springer-mass-damper system The 2 first-order equations are: Therefore, we define variable x 1 and x 2. Dynamic equation of the system:

9
Example: Springer-mass-damper system If the measured output of the system is position, then we have: In matrix form: General State-Space Model:

10
Example: Simple mechanical system The we will obtain: Dynamic equation of the system: Let us define variable x 1 and x 2.

11
Example: Simple mechanical system In vector form: The output equation:

12
Problem: Find the space-state for the following mechanical system.

13
Problem: Find the space-state for the following RLC circuit.

14
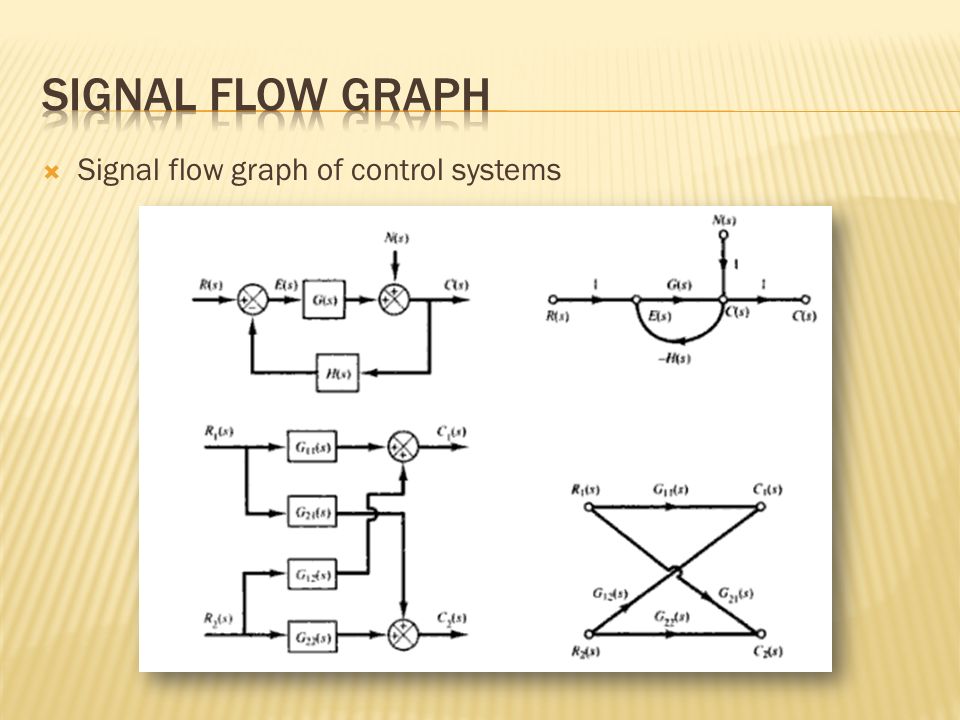
A signal flow graph is a graphical representation of the relationships between the variables of a set of linear algebraic equations. The basic element of a signal flow graph is a unidirectional path segments called branch. The input and output points or junctions are called nodes. A path is a branch or continuous sequence or branches that can be traversed from one signal node to another signal node. A loop is a closed path that originates and terminates on the same node, and along the path no node is met twice. Two loops are said to be non-touching if they do not have a same common node.

15
Signal flow graph of control systems

17
Mason’s Gain Formula for Signal Flow Graph Where, P ijk : k th path from variable x i to x j ∆: Determinant of the graph ∆ ijk : Cofactor of the path P ijk

18
Example: Transfer function of interacting system

19
The paths connecting input R(s) to output Y(s) are: P 1 = G 1 G 2 G 3 G 4 P 2 = G 5 G 6 G 7 G 8 There are four individual loops: L 1 = G 1 H 1 L 2 = G 2 H 2 L 3 = G 3 H 3 L 4 = G 4 H 4
 to output Y(s) are: P 1 = G 1 G 2 G 3 G 4 P 2 = G 5 G 6 G 7 G 8 There are four individual loops: L 1 = G 1 H 1 L 2 = G 2 H 2 L 3 = G 3 H 3 L 4 = G 4 H 4")
20
Example: Transfer function of interacting system Loops L 1 and L 2 does not touch loops L 3 and L 4. Therefore, the determinant is: The cofactor of the determinant along path 1 is evaluated by removing the loops that touch path 1 from ∆. Therefore have: and, Similarly, the cofactor for path 2 is:

21
Example: Transfer function of interacting system Therefore, the transfer function of the system is:

22
Problem: Obtain the closed-loop transfer function by use of Mason’s Gain Formula

23
Chapter 3 i. Dorf R.C., Bishop R.H. (2001). Modern Control Systems (9th Ed), Prentice Hall. ii. Nise N.S. (2004). Control System Engineering (4th Ed), John Wiley & Sons. Chapter 5 i. Nise N.S. (2004). Control System Engineering (4th Ed), John Wiley & Sons.
. Control System Engineering (4th Ed), John Wiley & Sons. Chapter 5 i. Nise N.S. (2004). Control System Engineering (4th Ed), John Wiley & Sons..")
24
“A mystic is someone who wants to understand the universe, but are too lazy to study physics…”

Similar presentations


 Why SFG? Block Diagrams are adequate for representation, but cumbersome. SFG provides the relation between system.>")
















