Download presentation
Presentation is loading. Please wait.

1
Chapter 7: Current Measurements A: Eulerian techniques/instruments 1. Mechanical current meters “Unidirectional” (Savonius) rotor plus vane problem: Counting revolutions (giving average scalar SPEED) plus a single direction reading gives nonsense results in oscillating flows. This was done in early Aandeeraa RCM 4/5 units. OK if no oscillating flows (no waves, mooring motion, turbulence, etc)
 rotor plus vane problem: Counting revolutions (giving average scalar SPEED) plus a single direction reading gives nonsense results in oscillating flows. This was done in early Aandeeraa RCM 4/5 units. OK if no oscillating flows (no waves, mooring motion, turbulence, etc).")
2
Aandeeraa RCM 4/5

3
Vector averaging: Measure u,v rapidly (e.g. from frequent speed and direction readings), convert to earth coordinates (N/S, E/W), and average in THOSE components. RCM 7/8 can do this A BIT (but whole instrument needs to turn, and read not very often because high compass current draw). Better VACM with vanes that respond very fast, read every few seconds and 5cm of displacement.
, convert to earth coordinates (N/S, E/W), and average in THOSE components. RCM 7/8 can do this A BIT (but whole instrument needs to turn, and read not very often because high compass current draw). Better VACM with vanes that respond very fast, read every few seconds and 5cm of displacement..")
4
Aandeeraa RCM 7/8

5
VACM

6
Rotor pumping

7
Vertical mooring motion: U (true current) w (mooring motion) s (total SPEED seen at rotor) but we want U=|s| cos β β If rotor does NOT respond with cos β behaviour, e.g. measures an amplitde closer to s, then it will always read wrong (usually too large) current in up/down oscillations. Normal rotors do NOT have cos β response VMCM
 current in up/down oscillations. Normal rotors do NOT have cos β response VMCM.")
8
VMCM

9
Additional problems: - Startup friction, or stalling in low currents, usually needs 1cm/s (once turning, accuracy can be much better) - growth/fouling: change in shape/drag calibration wrong - measuring in own wake in oscillating flows - compass problems (especially deviation by own housing, batteries, mounting, wire, ship, CTD rosette, etc…)
 - growth/fouling: change in shape/drag calibration wrong - measuring in own wake in oscillating flows - compass problems (especially deviation by own housing, batteries, mounting, wire, ship, CTD rosette, etc…)")
10
RCM 4/5 ACM VMCM VACM Error/mean Different current meters in oscillating flow

11
Stokes drift error

12
A: Eulerian techniques/instruments 2. Acoustic current meters

13
Acoustic current meter (3D-ACM) by FSI Acoustic traveltime measurement within the small volume often used for small-scale and turbulence measurements.
 by FSI Acoustic traveltime measurement within the small volume often used for small-scale and turbulence measurements.")
14
Cost: around $10,000

15
Sontek Argonaut Nortek Aquadopp Aanderaa RDI DVS Seaguard RCM Modern “point” current meters (doppler measurement) All except Aanderaa can be clamped on wire and have inductive telemetry option
 All except Aanderaa can be clamped on wire and have inductive telemetry option")
16
Special Nortek quote: -------------------- $12,000 bare $1000 clamp and fin $2500 inductive modem 5% quantity discount (10) Total cost $14,400
 Total cost $14,400")
17
ADCP

18
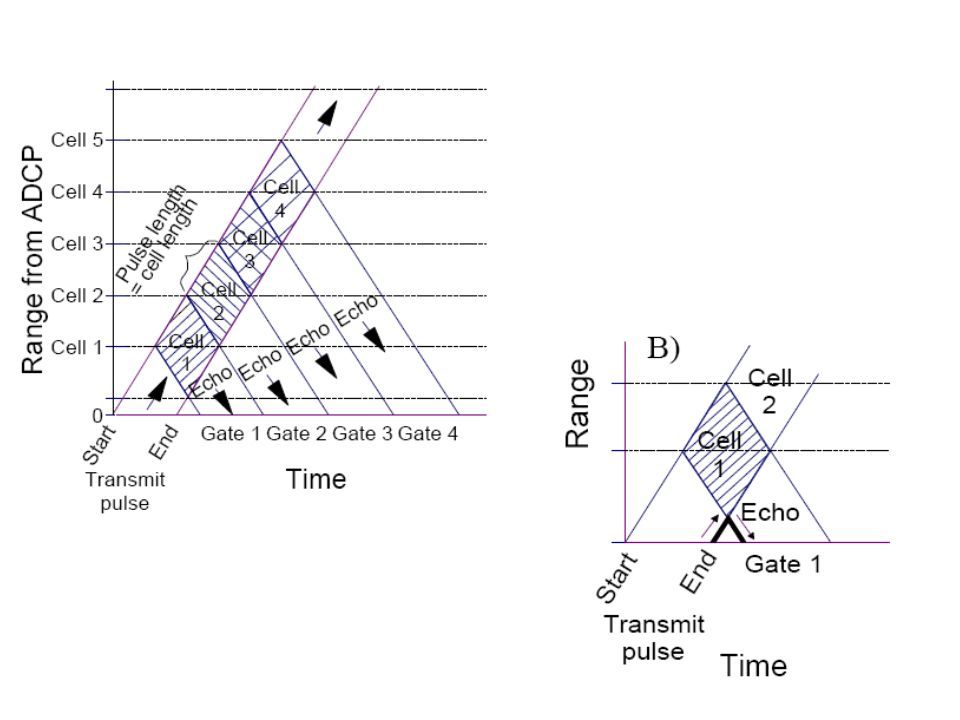
The transducers see the following velocity projections along their beams u beamE = -u sin φ u beamW = +u sin φ w beamE = w cos φ w beamW = w cos φ TOTAL for each transducer: s beamE = u beamE + w beamE s beamW = u beamW + w beamW Sum and difference: u=(s beamW -s beamE )/2 sin φ w E_W =(s beamE +s beamW )/2 cos φ Same for N-S beams. The 2 estimates for w are averaged for and differenced for “error velocity” – measure for quality of data/validity of assumptions…

21
Broadband ADCP uses coded pulses within a ping, and analyzes time/phase shift (via correlation techniques) to determine the distance/speed of moving scatterers. This gives an ambiguity if particles have travelled more than a wavelength, so in high currents only short-spaced pulses can be transmitted, reducing sampling quantity and accuracy. In low currents, pulses can be spaced further ambiguity velocity

23
Missing part of profile near reflector/boundary: H cos φ… 6% for 20 deg transducers !!! H

24
Blanking period required due to ringing:

27
Workhorse Sentinel 24-29k$ (200-6000m rated) Workhorse Quartermaser 38-40k$ (1500m rated) Workhorse Longranger 52k$ (1500m rated) Self-contained RDI ADCP’s, approx. to shown scale

28
ADCP setup example: Exercise with PlanADCP Accuracy is affected by: -Bin size -Ambiguity speed -Ensemble size -Broadband/Narrowband mode Resolution is affected by: -Bin size Range is affected by: -Bin size -Ambiguity -Broadband/Narrowband mode Proximity of first bin is affected by: - Blanking - bin size - ambiguity Read the RDI Broadband Primer (excellent !)…. Note battery capacity: We have up to 3 packs (1 internal, 2 external) with 300 Wh at 0 °C 470 Wh at 20 ° C hidden under “hardware settings”
 with 300 Wh at 0 °C 470 Wh at 20 ° C hidden under hardware settings .")
29
Convection cells in ADCP data Surface forcing and time integral of vertical velocity

30
Vessel-mounted ADCP (vmADCP) - typically 150 or 75kHz - now 38kHz Ocean Surveyor phased array - samples up to 1000 m depth - raw data in ship coordinates - use tilt and gyro to get earth coord. - then remove ship velocity with GPS data vessel-mounted ADCP

31
Serious problem with projecting ship velocity into ocean currents: u ship Measured: u apparent u true u observed U error =U ship sin φ ≈ 5m/s sin φ e.g. Φ=2° 17cm/s error u apparent u true u observed Correct for ship motion: add u ship u ship with small angle error error

32
Lowered ADCP (lADCP): use only du/dz and integrate afterwards U= ∫ du/dz dz + Const where Const from displacement during cast or bottom velocity vessel-mounted ADCP complete profile Single profiles Time [hours]
![Lowered ADCP (lADCP): use only du/dz and integrate afterwards U= ∫ du/dz dz + Const where Const from displacement during cast or bottom velocity vessel-mounted ADCP complete profile Single profiles Time [hours]](http://images.slideplayer.com/33/8149124/slides/slide_32.jpg "Lowered ADCP (lADCP): use only du/dz and integrate afterwards U= ∫ du/dz dz + Const where Const from displacement during cast or bottom velocity vessel-mounted ADCP complete profile Single profiles Time [hours]")
33
www.whoi.edu/science/ultramoor/ current meter comparison experiment:

34
A: Eulerian techniques/instruments 3. Electromagnetic current measurements B v I Electrodes Electric field strength (Faraday’s law) E ~ v x B Voltage (potential difference) U = ΔΦ = ∫ E ds ~ v x B More complete with return current path: E = j/σ – v x B
 E ~ v x B Voltage (potential difference) U = ΔΦ = ∫ E ds ~ v x B More complete with return current path: E = j/σ – v x B.")
35
Marsh McBirney S4 A: Generate the magnetic field actively:

36
B: Use earth’s magnetic field Cable measurement Earth magnetic field Fixed sensor: E = B vert x V* where V* conductivity-weighted vertical average Moving sensor: E = B vert x (V-V*) Free-falling measure E(z) thus V(z) except barotropic offset, i.e. only shear. Or MEASURE V with float get barotropic part V*

37
Free-falling E-M probe RAFOS float with electrodes

38
Compact Tx & Rx antennae 360-degree view Nominal range 50 km (other systems exist with over 100km) 2-3 km spatial resolution 1-hr integration time 13 MHz carrier frequency Measures currents in the upper metre Measures sea state up to the saturation limit at H s ~ 7.5 m Coastal Radar: Technical details
 2-3 km spatial resolution 1-hr integration time 13 MHz carrier frequency Measures currents in the upper metre Measures sea state up to the saturation limit at H s ~ 7.5 m Coastal Radar: Technical details")
39
Radial vectors from one station Full vectors from 2 stations

Similar presentations


 Fall 2013 Remote sensing In situ T, S and tracers Velocity Observing.>")
 Atlas (1989)>")



 Accuracy: marked to 0.5 o C Cost: £10 Site: in the shade (e.g. a Stevenson Screen) Mercury.>")








 Coastal HF Radar IMCS Building Room 214C 732-932-6555 ext 251 Dunes of sand.>")



