Download presentation
Presentation is loading. Please wait.

1
DCSP-16 Jianfeng Feng Department of Computer Science Warwick Univ., UK Jianfeng.feng@warwick.ac.uk http://www.dcs.warwick.ac.uk/~feng/dsp.html

2
Applications of filter

3
Example Right hemisphere Left hemisphere

4
HumanEar.jpg Frequency band [f1 f2] Frequency band [f3 f4]
![HumanEar.jpg Frequency band [f1 f2] Frequency band [f3 f4]](http://images.slideplayer.com/3/799572/slides/slide_4.jpg "HumanEar.jpg Frequency band [f1 f2] Frequency band [f3 f4]")
5
simple filter design In a number of cases, we can design a linear filter almost by inspection, by moving poles and zeros like pieces on a chessboard. This is not just a simple exercise designed for an introductory course, for in many cases the use of more sophisticated techniques might not yield a significant improvement in performance.

6
In this example consider the audio signal s(n), digitized with a sampling frequency Fs=12kHz. The signal is affected by a narrowband (i.e., very close to sinusoidal) disturbance w(n). Fig. show the frequency spectrum of the overall signal plus noise, x(n)=s(n)+w(n), which can be easily determined.
 disturbance w(n). Fig. show the frequency spectrum of the overall signal plus noise, x(n)=s(n)+w(n), which can be easily determined..")
8
Notice two facts: The signal has a frequency spectrum concentrated within the interval 0 to 6 kHz. The disturbance is at frequency F 0 =1.5 kHz. Now the goal is to design and implement a simple filter that rejects the disturbance without affecting the signal excessively. We will follow three steps:

9
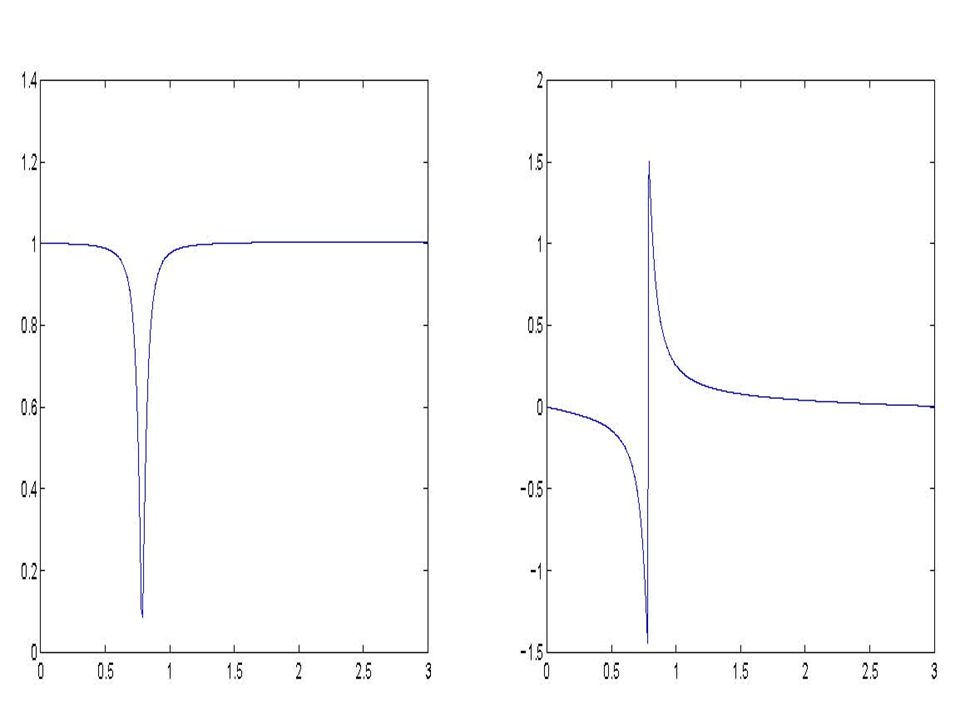
Step 1: Frequency domain specifications We need to reject the signal at the frequency of the disturbance. Ideally, we would like to have the following frequency response: where 0 =2 (F 0 /F s )= /4 radians, the digital frequency of the disturbance.
= /4 radians, the digital frequency of the disturbance..")
10
Step 2: Determine poles and zeros

11
/4

16
Step 3: Determine the difference equation in the time domain From the transfer function, the difference equation is determined by inspection: y(n)=1.343 y(n-1)-0.9025 y(n-2)+0.954 x(n) - 1.3495x(n-1)+0.9543 x(n-2)
=1.343 y(n-1) y(n-2) x(n) x(n-1) x(n-2)")
17
The difference equation can be easily implemented as a recursion in a high-level language. The final result is the signal y(n) with the frequency spectrum shown in Fig., where we notice the absence of the disturbance.
 with the frequency spectrum shown in Fig., where we notice the absence of the disturbance..")
19
demo C:\Program Files\MATLAB71\work simple_filter_design soundsc(s,Fs) soundsc(x,Fs) soundsc(y,Fs) soundsc(yrc,Fs)
 soundsc(x,Fs) soundsc(y,Fs) soundsc(yrc,Fs)")
Similar presentations







 Jianfeng Feng>")
















