Download presentation
Presentation is loading. Please wait.

1
NUAA-Control System Engineering
Chapter 4 Root-locus Technique

2
Contents in Chapter 4 4-1 Introduction 4-2 Root-locus equation
4-3 Rules to draw regular root loci 4-4 Generalized root loci 4-5 Analysis of control system by RL method 4-6 Control system design by the root-locus method 2

3
Introduction Stability and the characteristics of transient response of closed-loop systems Locations of the closed-loop poles Problems to solve characteristic equation : 1. Difficult for a system of third or higher order. 2. Tedious for varying parameters. 3

4
Varying the loop gain K R(s) K Y(s) H(s) G (s) -
The open loop gain K is an important parameter that can affect the performance of a system In many systems, simple gain adjustment may move the closed-loop poles to desired locations. Then the design problem may become the selection of an appropriate gain value. It is important to know how the closed-loop poles move in the s plane as the loop gain K is varied. 4

5
Root locus method A simple method for finding the roots of the characteristic equation has been developed by W.R.Evans. This method is called root locus method. Graphical Analysis of Control System, AIEE Trans. Part II,67(1948),pp Control System Synthesis by Root Locus Method, AIEE Trans. Part II,69(1950),pp.66-69 5
,pp Control System Synthesis by Root Locus Method, AIEE Trans. Part II,69(1950),pp")
6
The advantages of RL approach:
Root Locus: the locus of roots of the characteristic equation of the closed-loop system as a specific parameter (usually, gain K) is varied form 0 to ∞. The advantages of RL approach: 1. Avoiding tedious and complex roots-solving calculation 2. Clearly showing the contributions of each loop poles or zeros to the location of the closed-loop poles. 3. Indicating the manner in which the loop poles and zeros should be modified so that the response meets system performance specifications. 6
 is varied form 0 to ∞. The advantages of RL approach: 1. Avoiding tedious and complex roots-solving calculation. 2. Clearly showing the contributions of each loop poles or zeros to the location of the closed-loop poles. 3. Indicating the manner in which the loop poles and zeros should be modified so that the response meets system performance specifications. 6.")
7
4-2 Root-locus equation 7

8
Consider a second-order system shown as follows:
Start from an example Consider a second-order system shown as follows: Closed-loop TF: R(s) - Y(s) Characteristic equation (CE): Roots of CE: The roots of CE change as the value of k changes. When k changes from 0 to ∞, how will the locus of the roots of CE move? 8 8
 - Y(s) Characteristic equation (CE): Roots of CE: The roots of CE change as the value of k changes. When k changes from 0 to ∞, how will the locus of the roots of CE move")
9
k=0 -1/2 -1 As the value of k increases, the two negative real roots move closer to each other. A pair of complex-conjugate roots leave the negative real-axis and move upwards and downwards following the line s=-1/2. On the s plane, using arrows to denote the direction of characteristic roots move when k increases, by numerical value to denote the gain at the poles. 9 9

10
By Root loci, we can analyze the system behaviors
(1)Stability: when Root loci are on the left half plane, then the system is definitely stable for all k>0. (2)Steady-state performance: there ’s an open-loop pole at s=0, so the system is a type I system. The steady-state error is under step input signal v0/Kv under ramp signal v0t ∞ under parabolic signal. 10 10
Stability: when Root loci are on the left half plane, then the system is definitely stable for all k>0. (2)Steady-state performance: there ’s an open-loop pole at s=0, so the system is a type I system. The steady-state error is. 0 under step input signal. v0/Kv under ramp signal v0t. ∞ under parabolic signal")
11
(3)Transient performance:
there’s a close relationship between root loci and system behavior on the real-axis: k<0.25 underdamped; k=0.25 critically damped k>0.25 underdamped. However, it’s difficult to draw root loci directly by closed-loop characteristic roots-solving method. The idea of root loci : by loop transfer function, draw closed-loop root loci directly.

12
Relationship between zeros and poles of G(s)H(s) and closed-loop ones
R(S) Y(s) Forward path TF: Closed-loop TF: Feedback path TF: 12
 Y(s) Forward path TF: Closed-loop TF: Feedback path TF: 12.")
13
Write G(s) and H(s) into zero-pole-gain (zpk) form:
RL gain of forward path RL gain of feedback path Zeros of forward path TF Poles of forward path TF Zeros of feedback path TF Poles of feedback path TF

14
1.The closed-loop zeros = feed forward path zeros + feedback path poles.
2. The closed-loop poles are related to poles and zeros of G(s)H(s) and loop gain K. 3.The closed-loop root loci gain = the feed forward path root loci gain
H(s) and loop gain K. 3.The closed-loop root loci gain = the feed forward path root loci gain .")
15
Root-locus equation To draw Closed-loop root locus is to solve the CE
That is RL equation Suppose that G(s)H(s) has m zeros (Zi) and n poles(Pi), the above equation can be re-written as K* varies from 0 to ∞ 15
H(s) has m zeros (Zi) and n poles(Pi), the above equation can be re-written as. K* varies from 0 to ∞ 15.")
16
Magnitude equation (ME) Angle equation (AE)
RL equation: Since G(s)H(s) is function of a complex variable s, the root locus equation can be described by the following two equations: Magnitude equation (ME) Angle equation (AE) 用幅角条件来绘制根轨迹,用幅值条件来确定已知根轨迹上某一点K’的值。 Magnitude equation is related not only to zeros and poles of G(s)H(s), but also to RL gain ; Angel equation is only related to zero and poles of G(s)H(s). Use AE to draw root loci and use ME to determine the value of K on root loci. 16 16
H(s) is function of a complex variable s, the root locus equation can be described by the following two equations: Magnitude equation (ME) Angle equation (AE) 用幅角条件来绘制根轨迹,用幅值条件来确定已知根轨迹上某一点K’的值。 Magnitude equation is related not only to zeros and poles of G(s)H(s), but also to RL gain ; Angel equation is only related to zero and poles of G(s)H(s). Use AE to draw root loci and use ME to determine the value of K on root loci")
17
For a point s1 on the root loci, use AE
Example 1 Poles of G(s)H(s)(×) Zeros of G(s)H(s)(〇) For a point s1 on the root loci, use AE Use ME Angel is in the direction of anti-clockwise 17
H(s)(×) Zeros of G(s)H(s)(〇) For a point s1 on the root loci, use AE. Use ME. Angel is in the direction of anti-clockwise. 17.")
18
Unity-feedback transfer function:
Example 2 Unity-feedback transfer function: One pole of G(s)H(s): No zero. Test a point s1 on the negative real-axis All the points on the negative real-axis are on RL. Test a point outside the negative real-axis s2=-1-j All the points outside the negative real-axis are not on RL. 18
H(s): No zero. Test a point s1 on the negative real-axis. All the points on the negative real-axis are on RL. Test a point outside the negative real-axis s2=-1-j. All the points outside the negative real-axis are not on RL. 18.")
19
However, it’s unrealistic to apply such “probe by each point” method.
1. Find all the points that satisfy the Angle Equation on the s-plane, and then link all these points into a smooth curve, thus we have the system root locus when k* changes from 0 to ∞; 2. As for the given k, find the points that satisfy the Magnitude Equation on the root locus, then these points are required closed-loop poles. However, it’s unrealistic to apply such “probe by each point” method. W.R. Evans (1948) proposed a set of root loci drawing rules which simplify the our drawing work.
 proposed a set of root loci drawing rules which simplify the our drawing work.")
20
4-3 Rules to draw regular root loci
(suppose the varying parameter is open-loop gain K ) 20
 20.")
21
Properties of Root Loci
and points of Root Loci 2 Number of Branches on the RL 3 Symmetry of the RL 4 Root Loci on the real-axis 5 Asymptotes of the RL 6 Breakaway points on the RL 7 Departure angle and arrival angle of RL 8 Intersection of the RL with the imaginary axis 9 The sum of the roots and the product of the roots of the closed-loop characteristic equation 21

22
and points Root loci originate on the poles of G(s)H(s) (for K=0) and terminates on the zeros of G(s)H(s) (as K=∞). RL Equation: Magnitude Equation: Root loci start from poles of G(s)H(s) Root loci end at zeros of G(s)H(s). 22
H(s) Root loci end at zeros of G(s)H(s). 22.")
23
2 Number of branches on the RL
nth-order system, RL have n starting points and RL have n branches RL Equation: The order of the characteristic equation is n as K varies from 0 to ∞ ,n roots changen root loci. For a real physical system, the number of poles of G(s)H(s) are more than zeros,i.e. n > m. n root loci end at open-loop zeros(finite zeros); m root loci end at open-loop zeros(finite zeros); (n-m)root loci end at (n-m) infinite zeros. 23
H(s) are more than zeros,i.e. n > m. n root loci end at open-loop zeros(finite zeros); m root loci end at open-loop zeros(finite zeros); (n-m)root loci end at (n-m) infinite zeros. 23.")
24
3 Symmetry of the RL The RL are symmetrical with respect to the real axis of the s-plane. The roots of characteristic equation are real or complex-conjugate. Therefore, we only need to draw the RL on the up half s-plane and on the real-axis, the rest can be obtained by plotting its mirror image. 24

25
4 RL on the Real Axis zero:z1 poles:p1、p2、p3、p4、p5
On a given section of the real axis, RL for k>0 are found in the section only if the total number of poles and zeros of G(s)H(s) to the right of the section is odd. zero:z1 poles:p1、p2、p3、p4、p5 Pick a test point s1 on [p2,p3] ? The sum of angles provided by every pair of complex conjugate poles are 360°; The angle provided by all the poles and zeros on the right of s1 is 180°; The angle provided by all the poles and zeros on the left of s1 is 0°. 25 25
H(s) to the right of the section is odd. zero:z1. poles:p1、p2、p3、p4、p5. Pick a test point s1 on [p2,p3] ? The sum of angles provided by every pair of complex conjugate poles are 360°; The angle provided by all the poles and zeros on the right of s1 is 180°; The angle provided by all the poles and zeros on the left of s1 is 0°")
26
Consider the following loop transfer function
Example Consider the following loop transfer function Determine its root loci on the real axis. jw Poles: Zeros: S-plane Repeated poles: -6 -5 -4 -3 -2 -1 On the right of [-2,-1] the number of real zeros and poles=3. On the right of [-6,-4], the number of real zeros and poles=7. 26

27
5 Asymptotes of RL When n ≠ m, there will be 2|n-m| asymptotes that describe the behavior of the RL at |s|=∞. RL Equation: The angles between the asymptotes and the real axis are(i= 0,1,2,… ,n-m-1) : The asymptotes intersect the real axis at: 27
 : The asymptotes intersect the real axis at: 27.")
28
Consider the following loop transfer function
Example Consider the following loop transfer function Determine the asymptotes of its root loci. 3 poles:0、-1、-5 n-m = 3 -1 = 2 1 zero:-4 The asymptotes intersect the real axis at The angles between the asymptotes and the real axis are 28

29
Consider the following loop transfer function
Example Consider the following loop transfer function Determine the asymptotes of its root loci. 4 poles:0、-1+j、-1-j、-4 n-m=4-1=3 1 zero:-1 The asymptotes intersect the real axis at The angles between the asymptotes and the real axis are 29 29

30
6 Breakaway points on the RL
Breakaway points on the RL correspond to multi-order roots of the RL equation. The breakaway points on the RL are determined by finding the roots of dK/ds=0 or dG(s)H(s)=0. 30 30
H(s)=")
31
The breakaway point b is the solution of Method-1
Proof: Suppose the multi-order root is s1,then we have 31

32
Solutions1 is the breakaway point b
(2) divided by (1) yields Thus Or Solutions1 is the breakaway point b 32
 divided by (1) yields. Thus. Or. Solutions1 is the breakaway point b. 32.")
33
Ruel 4The intersections [-1,0] and[-3,-2] on the real axis are RL.
Example The poles and zeros of G(s)H(s) are shown in the following figure, determine its root loci. -1 -2 -3 jω σ Rule 1、2、3 RL have three branches,starting from poles 0、-2、-3,ending at on finite zero -1 and two infinite zeros. The RL are symmetrical with respect to the real axis. Ruel 4The intersections [-1,0] and[-3,-2] on the real axis are RL. Rule 5The RL have two asymptotes(n-m=2) Rule 6The RL have breakaway points on the real axis (within[-3,-2]) 33 33
![Ruel 4The intersections [-1,0] and[-3,-2] on the real axis are RL.](http://slideplayer.com/slide/7807698/25/images/33/Ruel+4%EF%83%A0The+intersections+%5B-1%2C0%5D+and%5B-3%2C-2%5D+on+the+real+axis+are+RL..jpg "Example. The poles and zeros of G(s)H(s) are shown in the following figure, determine its root loci jω. σ. Rule 1、2、3 RL have three branches,starting from poles 0、-2、-3,ending at on finite zero -1 and two infinite zeros. The RL are symmetrical with respect to the real axis. Ruel 4The intersections [-1,0] and[-3,-2] on the real axis are RL. Rule 5The RL have two asymptotes(n-m=2) Rule 6The RL have breakaway points on the real axis (within[-3,-2])")
34
K corresponding to the breakaway point has the maximum value. Thus
The breakaway point b is the solution of Method-2 Proof: Suppose s moves from p2 to p1, if we increase K from zero,K reaches its maximum when s reaches b. Then K decreases and reaches zero at p1. K corresponding to the breakaway point has the maximum value. Thus 34

35
Rule 1、2、3、4 n=4,m=0 σ Rule 5 Example jω
-2 -j4 -4 jω σ j4 Rule 1、2、3、4 n=4,m=0 the RL are symmetrical with respect to the real axis; the RL have four branches which start from poles 0,-4 and -2±j4 ; the RL end at infinite zeros; the intersection [-4,0] on the real-axis is RL Rule 5 The RL have four asymptotes. 35

36
Rule 6the breakaway point of the RL
Example -2 -j4 -4 jω σ j4 Rule 6the breakaway point of the RL 36

37
7 Angles of departure and angles of arrival of the RL
The angle of departure or arrival of a root locus at a pole or zero, respectively, of G(s)H(s) denotes the angle of the tangent to the locus near the point. 37
H(s) denotes the angle of the tangent to the locus near the point. 37.")
38
Angle of Departure: Pick up a point s1 that is close to p1
Applying Angle Equation (AE) s1p1 angle of departure θp1 38
 s1p1. angle of departure θp")
39
Angle of Arrival: 39

40
j Consider the following loop transfer function
Example Consider the following loop transfer function Determine its RL when K varies from 0 to ∞. 3 poles P1,2=-1(repeated poles) P3=1;1 zero Z1=0,n-m=2。 3 branches ,2 asymptotes -1 j -0.5 1 Angle of departure: 40
 P3=1;1 zero Z1=0,n-m=2。 3 branches ,2 asymptotes. -1. j Angle of departure: 40.")
41
8 Intersection of the RL with the Imaginary Axis
The characteristic equation have roots on the Im-axis and the system is marginally stable. Intersection of the RL with Im-axis? Method 1 Use Routh’s criterion to obtain the value of K when the system is marginally stable, the get ω from K. Method 2 41

42
Consider the following loop transfer function
Example Determine the intersection of the RL with Im-axis. Method 1 Closed-loop CE: Routh’s Tabulation: Marginally stable: K =6 Auxiliary equation: Intersection point: 42

43
Consider the following loop transfer function
Example Determine the intersection of the RL with Im-axis. Method 2 Closed-loop CE: →Closed-loop CE 43

44
Summary of General Rules for Constructing Root Loci
G(s) H(s) - R(S) Y(s) First, obtain the characteristic equation (CE) Then, rearrange the equation so that the parameters of interest appear as the multiplying factor in the form We sketch the Root Loci when K>0 varies from 0 to ∞.
 H(s) - R(S) Y(s) First, obtain the. characteristic equation (CE) Then, rearrange the equation so that the parameters of interest appear as the multiplying factor in the form. We sketch the Root Loci when K>0 varies from 0 to ∞.")
45
Step 1: Locate the poles and zeros of G(s)H(s) on the s-plane
Step 1: Locate the poles and zeros of G(s)H(s) on the s-plane. The RL start from poles of G(s)H(s) and terminate at zeros (finite zeros or zeros at infinity) Step 2: Determine the RL on the real-axis. Choose a test point on the real-axis, if the total number of real poles and real zeros to the right of the test is odd, then the test point is on the RL. Step 3: Determine the asymptotes of RL. The angles between the asymptotes and the real axis are(i= 0,1,2,… ,n-m-1) : The asymptotes intersect the real-axis at:
H(s) on the s-plane. The RL start from poles of G(s)H(s) and terminate at zeros (finite zeros or zeros at infinity) Step 2: Determine the RL on the real-axis. Choose a test point on the real-axis, if the total number of real poles and real zeros to the right of the test is odd, then the test point is on the RL. Step 3: Determine the asymptotes of RL. The angles between the asymptotes and the real axis are(i= 0,1,2,… ,n-m-1) : The asymptotes intersect the real-axis at:")
46
Step 4: Determine the breakaway and break-in points.
The breakaway and break-in points can be determined by finding the roots of Step 5: Determine the angle of departure (angle of arrival) of the RL from a complex pole (at a complex zero) Angle of departure from a complex pole pj= Angle of arrival at a complex zero zk=
 of the RL from a complex pole (at a complex zero) Angle of departure from a complex pole pj= Angle of arrival at a complex zero zk=")
47
Step 6: Find the points where the RL may cross the imaginary-axis.
Method 1 Use Routh’s criterion to obtain the value of K when the system is marginally stable, the get ω from K. Method 2

48
Sketch RL of the closed-loop system when K varies from 0 to ∞.
Example Consider a unity feedback system with the open-loop transfer function as: Sketch RL of the closed-loop system when K varies from 0 to ∞. Solution. loop TF: Step 1: Locate the poles and zeros of G(s)H(s) on the s-plane. loop poles: p1=0, p2=-3, p3,4=-1±j, n=4; no loop zeros: m=0; 48
H(s) on the s-plane. loop poles: p1=0, p2=-3, p3,4=-1±j, n=4; no loop zeros: m=0; 48.")
49
Step 3: Determine the asymptotes of RL
Step 2: Determine the RL on the real-axis. The section [0,-3] of the real axis are RL. -0.5 0.5 1 1.5 -1 -1.5 -2 -2.5 -3 Step 3: Determine the asymptotes of RL The angles between the asymptotes and the real axis are(i= 0,1,2,… ,n-m-1) : The asymptotes intersect the real-axis at: 49
 : The asymptotes intersect the real-axis at: 49.")
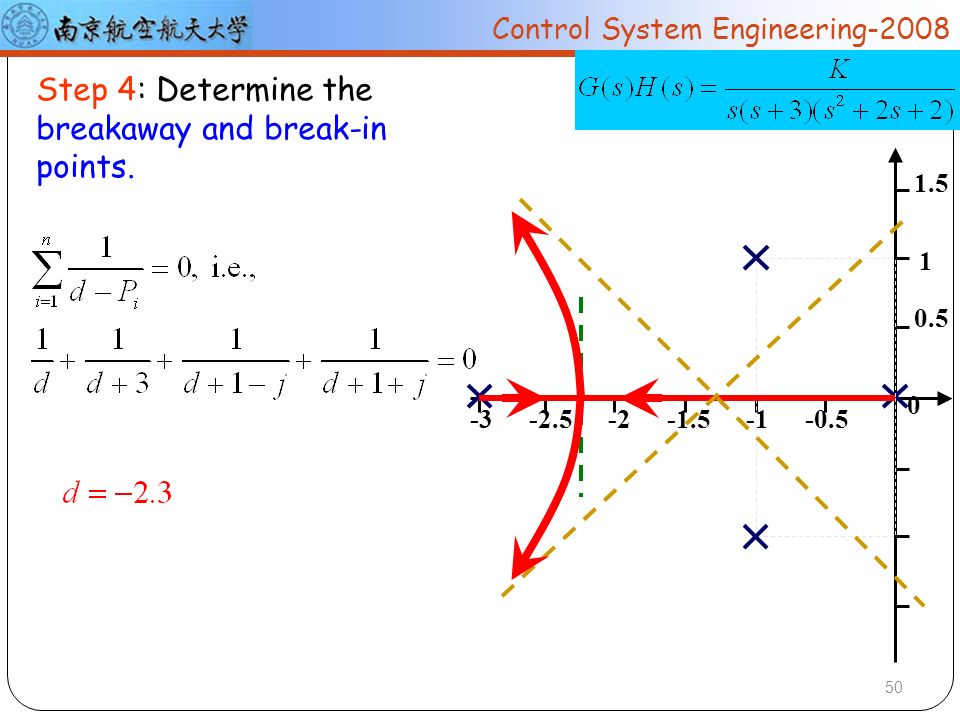
50
Step 4: Determine the breakaway and break-in points.
-0.5 0.5 1 1.5 -1 -1.5 -2 -2.5 -3 50
51
Step 5: Determine the angle of departure (angle of arrival) of the RL from a complex pole (at a complex zero) -0.5 0.5 1 1.5 -1 -1.5 -2 -2.5 -3 Using measurement to estimate 51

52
Step 6: Find the points where the RL may cross the imaginary-axis.
-0.5 0.5 1 1.5 -1 -1.5 -2 -2.5 -3 The characteristic equation: Substituting S=jw into the above equation yields: 52

53
The complete RL: 1.5 1 0.5 -3 -2.5 -2 -1.5 -1 -0.5 53

54
RL Demo 1 j j j j j j j j j j j

55
RL Demo 2 j j j j j j j j j j j j

56
Draw RL using MATLAB Loop function: >>n=1;
>>sys=tf(n,d); >>rlocus(sys) 56
; >>rlocus(sys) 56.")
57
Determination of closed-loop poles
Every point on the RL represents a closed-loop pole corresponding to a certain value of K which can be determined according to the Magnitude Equation。 Magnitude Equation :

58
Determine the closed-loop poles when K =4.
Example Given the RL of a unity feedback system whose open-loop transfer function is: Determine the closed-loop poles when K =4. -0.5 0.5 1 1.5 -1 -1.5 -2 -2.5 -3 d=-2.3 jw=-1.1

59
Magnitude Equation : Determine the closed-loop pole according to ME:
4 poles,no zero At the breakaway point d=-2.3, its corresponding K=4.3 K increases from 0 to 4.3 Pick two points within [-3,-2.3] and [-2.3,0] , using trial-and-error to find the closed-loop poles on the real-axis. So there are exist the two real closed-loop poles locating at two sides of the breakaway point corresponding to K=4

60
Using the ‘Synthetic Division’ to get
Closed-loop CE: Using the ‘Synthetic Division’ to get

61
So when K=4, the closed-loop transfer function is

62
Effects of Adding Poles and Zeros to G(s)H(s)
Example Poles: -4, 0 -4 -2 Breakaway point:

63
1. Addition of poles of G(s)H(s)
Adding a pole to G(s)H(s) has the effect of pushing the root loci toward the right-half plane. Example Add a pole at s=-5, we have -5 -4 -3 Poles: -5,-4, 0 no zeros, n=3,m=0 -4 -2 RL on real-axis: (-∞,-5] and [-4,0] Angle of asymptotes= 60°,180° ,300° Intersection of asymptotes with real-axis = -3 Breakaway point: Intersection of RL with Im-axis = ±4.47j
H(s) has the effect of pushing the root loci toward the right-half plane. Example. Add a pole at s=-5, we have Poles: -5,-4, 0 no zeros, n=3,m= RL on real-axis: (-∞,-5] and [-4,0] Angle of asymptotes= 60°,180° ,300° Intersection of asymptotes with real-axis = -3. Breakaway point: Intersection of RL with Im-axis = ±4.47j.")
64
2. Addition of zeros of G(s)H(s)
Adding left-half plane zeros to G(s)H(s) generally has the effect of moving and bending the root loci toward the left-half plane. Example Add two zeros at s=-5±3j, we have 3 Poles: -4, 0 zero: -5±3j, n=2,m=2 -4 -2 RL on real-axis: [-4,0] -5 -4 -3 Breakaway point: -3
H(s) generally has the effect of moving and bending the root loci toward the left-half plane. Example. Add two zeros at s=-5±3j, we have. 3. Poles: -4, 0 zero: -5±3j, n=2,m= RL on real-axis: [-4,0] Breakaway point: -3.")
65
RL for the case of varying zeros of G(s)H(s)
Example 1. Given a system’s structure diagram, where the parameter is speed feedback constant. Problem: Draw RL when varies from 0 to ∞. Y(s) s - R(s)
 1+ s. - R(s)")
66
The RL loop transfer function is
Y(s) s - R(s) The closed-loop transfer function is:
 1+ s. - R(s) The closed-loop transfer function is:")
67
The characteristic equation is:
It can be re-written as Define The is the equivalent RL loop transfer function whose RL loop gain is

68
The new system is shown as follows:
The closed-loop transfer function : Note: The same denominator, but different numerator, compared with the original system. - Y(s) R(s)
 R(s)")
69
2 branches, one approaches to zero, the other approaches to inf
2 poles, 1 zeros n=2, m=1 For the new system: 2 branches, one approaches to zero, the other approaches to inf There are RL on the real axis [-∞, 0] jω σ -1 -2 -3 -4 1 2 3

70
Analysis of the influence of variation of Kt on the system
Remark With the root loci drew by equivalent open-loop transfer function, we can only determine system closed-loop poles, we still need to determine the system closed-loop zeros to analyze system dynamic behavior. Analysis of the influence of variation of Kt on the system When Kt varies from 0 to infinity, an zero is added to the loop function G(s)H(s) and the zero moves from the negative infinity to the origin of s-plane. Y(s) s - R(s)
H(s) and the zero moves from the negative infinity to the origin of s-plane. Y(s) 1+ s. - R(s)")
71
jω σ -1 -2 -3 -4 1 2 3 When Kt is small, a pair of closed-loop complex-conjugate poles are close to the Im-axis, the overshoot of system step response is large and the oscillation is strong. When Kt is small, the system velocity feedback signal is weak and under-damped. When Kt increases, the system damp is enhanced, the oscillation is weaken and the overshoot decreases, the system behavior is enhanced. The breakaway point: Kt=0.43,the system is critically damped. When Kt>0.43, the two closed-loop poles are negative and real , the system is over-damped. Adding left-half plane zeros to open-loop transfer function generally has the effect of moving and bending the root loci toward the left-half s-plane.

72
RL for the case of varying poles of G(s)H(s)
Example 2: Consider a unity feedback system whose open-loop transfer function is where K and T are given constants,while the parameterτ is to be determined. Problem: Draw RL whenτvaries from 0 to infinity.

73
The characteristic equation: 1+G(S)H(s)=0
The equivalent open loop transfer function G1(s): Solving Suppose that 4KT>1, then two complex poles of G(S) are:
: Solving. Suppose that 4KT>1, then two complex poles of G(S) are:")
74
2 poles, 3 zeros Z1=Z2=0,Z3=-1/T So number of branches of the RL is equal to 3. According to rule 8, the interaction point with the imaginary axis is determined by 1+G1(jw)=0, that is It follows that
=0, that is. It follows that.")
75
RL whenτvaries from 0 to infinity is shown as follows:
Adding a pole to open-loop transfer function has The effect of pushing the RL toward the right-half plane the system is unstable.

76
Consider the RL of a unity-feedback system
j 1 -1 -2 Example s=0.7j Consider the RL of a unity-feedback system k1=0.332 1 Determine the closed-loop TF when its CE has multi-order roots. d2= -1.37 d1=0.366 k2=13.9 k1=0.0718 2 Determine the steady-state error with a ramp input for underdamped closed-loop system Solution. 1. RL loop function: The CE of closed-loop system has multi-order roots at two breakaway points which are actually two closed-loop roots

77
Consider the RL of a unity-feedback system
j 1 -1 -2 Example s=0.7j Consider the RL of a unity-feedback system k1=0.332 1 Determine the closed-loop TF when its CE has multi-order roots. d2= -1.37 d1=0.366 k2=13.9 k1=0.0718 2 Determine the steady-state error with a ramp input for underdamped closed-loop system Type-1 system: Solution. 2. RL loop function: For a ramp input, the ramp error constant: Closed-loop system is underdamped: The steady-state error:

78
An example of a control system analysis and design utilizing Root Locus technique

79
An automatic self-balancing scale

80
We desire to accomplish the following:
Select the parameters of the system Determine the specifications Obtain a model represent the system Design the gain K using root locus Determine the dominant mode of response

81
Parameters

82
Specifications Specifications
A rapid and accurate response resulting in a small steady-state weight measurement error is desired. Specifications Steady-state error (for a step input) Kp=∞, ess=0 Underdamped response ζ=0.5 Settling time (error band Δ<2%) ts<2sec
 Kp=∞, ess=0. Underdamped response. ζ=0.5. Settling time (error band Δ<2%) ts<2sec.")
83
Mathematical model For a small deviations from balance, the deviation angle is The motion of the beam about the pivot is represented by the torque equation:

84
Mathematical model The input voltage to the motor is
The transfer function of the motor is: where τis negligible with respect to the time constants of the overall system and θm is the output shaft rotation.

85
Block diagram Signal-flow

86
Using Mason’s formula:
The closed-loop transfer function: Forward path: Loop path: The steady-state gain of the system is: Nontouching loops: Characteristic equation:

87
Substituting the selected parameter into the CE yields:
To rewrite it into root locus form, first isolate Km as follows:

88
Rewrite it into root locus form:

89
Closed-loop CE: We draw the root locus as K varies from 0 to ∞ With MATLAB: > >z=[ i, i]; >>p=[ ]; >>k=1; >>sys=zpk(z,p,k); >>rlocus(sys) The dominant closed-loop poles can be placed at: To achieve this gain:
![Closed-loop CE: We draw the root locus as K varies from 0 to ∞ With MATLAB: > >z=[ i, i];](http://slideplayer.com/slide/7807698/25/images/89/Closed-loop+CE%3A+We+draw+the+root+locus+as+K+varies+from+0+to+%E2%88%9E+With+MATLAB%3A+%3E+%3Ez%3D%5B+i%2C+i%5D%3B.jpg ">>p=[ ]; >>k=1; >>sys=zpk(z,p,k); >>rlocus(sys) The dominant closed-loop poles can be placed at: To achieve this gain:")
90
Let us observe the time-domain step response of the closed-loop system with the designed Km in MATLAB to see if it satisfied the desired specifications. Specifications Steady-state error (for a step input) Kp=∞, ess=0 Underdamped response ζ=0.5 Settling time (error band Δ<2%) ts<2sec
 Kp=∞, ess=0. Underdamped response. ζ=0.5. Settling time (error band Δ<2%) ts<2sec.")
91
Parameter Design by Root Locus Technique

92
Originally the root locus method was developed in determine the loci of roots of the characteristic equation as the system gain, K, varies from 0 to ∞. However, as we have see, the effect of other system parameters may be readily investigated by using the root locus technique. For example, a third-order equation of interest might be To ascertain the effect of the parameter α, we isolate the parameter and rewrite the equation in root locus form

93
If there are more than one (m>1) parameters we want to investigate, we must repeat the root locus approach m times. For example, a third-order characteristic equation with and as parameters The effect of varying from 0 to ∞ is determined from the root locus equation The denominator of the above RL equation is the characteristic equation of the system with

94
Therefore, we must first evaluate the effect of varying
from 0 to ∞ by utilizing Rewritten as RL form: Then upon evaluating the effect of , a value of is selected and used to evaluate the effect of . When more than one parameters varies continuously from 0 to ∞, the family of root loci are referred to as the root contours(RC).
.")
95
Example

Similar presentations










 = 0 The root locus is essentially the trajectories of roots of.>")

>")


 Dr. Imtiaz Hussain URL :http://imtiazhussainkalwar.weebly.com/>")
 m x(t) fd(t) LINEAR CONTROL C (Ns/m) k (N/m)>")


