Download presentation
Presentation is loading. Please wait.

1
LUNAR ROVER Concept proposal meeting Dr. Ashish Dutta Indian Institute of Technology Kanpur Kanpur, INDIA ( *** for private circulation only)
.")
2
Chandrayan 1: mapping the moon Chandrayan 2: landing a mobile robot for experiments on moon

3
1. Introduction: Chandrayan 2 PSLV-Lander-Rover LANDER ROVER

4
Lunar surface :dust, rocks, ash, craters,

5
Rocks, craters

6
Many Challenges Lunar gravity Cosmic radiation Extreme temperature -180 to 220 C Difficult terrain : dust, craters, rocks Time lag in control 2 secs Flying dust, clouds cameras Communication with earth

7
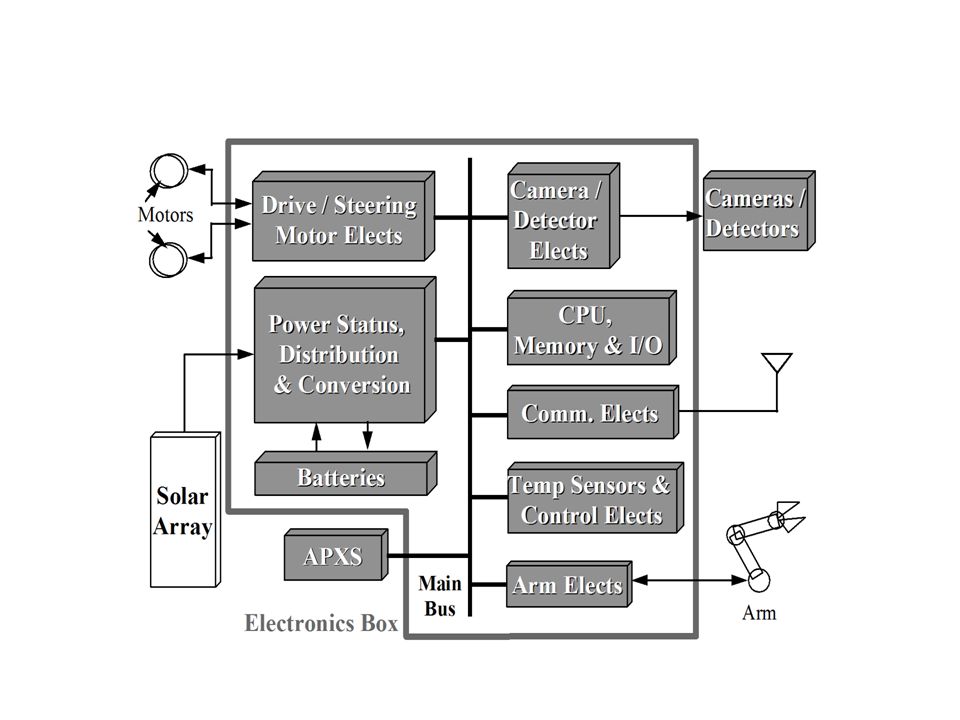
DIFFERENT SUB-SYSTEMS INVOLVED IN THE COMPLETE DESIGN

8
1. Rover structure Structural design (frame) Materials for construction Wheels & Legs? How many wheels? Electronics enclosure and insulation Vibration suppression Position of arm, cameras

10
2. Drive system Motors (DC brush less ) Sensors (position, acceleration?) Leg/wheel mechanism Steering motor system: located at wheel base Tyres : rubber, Ti wire based
 Sensors (position, acceleration ) Leg/wheel mechanism Steering motor system: located at wheel base Tyres : rubber, Ti wire based.")
11
3. Control System Motor controllers – PID ? Processor requirements I/O considerations Memory Considerations Power requirements. Central controller.

13
4. Sensor System for Navigation Vision based navigation Path planning Obstacle detection (laser, ultrasonic ) Self localization based on Lander coordinates
 Self localization based on Lander coordinates.")
14
5. Communication System – Antenna Design – Transceiver 6. Thermal System – Passive thermal system. – Active thermal System. 7. Power system – Solar batteries. – Recharging and monitoring. – Power regulation. – Batteries: Nickel-Cd, Silver-Zn ?

15
8. Lander interface – Mechanical interface ( to hold rover in position ) – Electrical interface. 9. Arm Manipulator – DOF (5 DOF ?) – Requirements (Cleaning solar panels, digging, etc.) – Structure
 – Requirements (Cleaning solar panels, digging, etc.) – Structure.")
16
10. Rover Operations – Start up procedures – Motor and arm initialization procedures – Rover deployments – Robot arm cleaning – Sample collecting + testing 11. Failure diagnostics and recovery – Possible modes of failure – Recovery – Back up

17
Main focus based on our strengths in IITK Robot design and vision based control Vision based control of rover Coordinated wheel control with slip Vision based navigation Thermal management using – heat pipes

18
IITK WORK SCHEDULE Design of rover with robot arm and its fabrication. Multi wheel coordination control with active slip compensation Visual map generation of lunar surface and navigation. Visual control of arm and rover. Development of test set up at IITK. Development of a virtual reality simulation of rover and lunar terrain. Experimental evaluation of developed rover

19
Future directions Possible route for developing indigenous strength in this area. Design of advanced future rovers. - Legged vehicles. - Hybrid : leg and wheels based rovers.

20
Strengths of IIT Kanpur Vision based navigation and robot control. Hardware development. Large number of systems developed : both wheeled and legged. Computational aspects of robotics. Sensor development and integration.

21
Functional specifications from VSSC 1.MOBILE ROBOT STRUCTURE: ACCEPTABILITY / TESTING a. kinematic alternativessimulation b. minimum clearance test bed with obstacles c. wheel assembly unit: * traction, control, payload wheel assembly test bed * steering accuracy test under load d. control system response measurement e. power budget subunits / total power testing f. solar panels: deployment+cleaning e. payload / stability ramped terrain 2. VISION-BASED NAVIGATION: a. design validationsimulation b. path planning testing ground truth comparison c. terrestrial testing trajectory measurement test bed d. accuracy / reliability repeated path point testing e. contingency / recovery

22
Further testing at VSSC – Level 2 : integrated functional testing / terrestrial robustness – Level 3 : thermal testing / radiation test – Level 4 : fully space qualified system

23
Thank you

Similar presentations




















, and Arvin Agah ITTC,>")