Download presentation
Presentation is loading. Please wait.

2
SIMPLE HARMONIC MOTION

3
This unit is made up of the following: Reference circle (page 92 – 94). Graphs, Phasors & Equations (page 94 – 101). SHM of a spring (page 102 – 103). SHM of a pendulum (page 104). Energy of SHM. Forced SHM & Resonance (page 105 – 106).
. SHM of a spring (page 102 – 103). SHM of a pendulum (page 104). Energy of SHM. Forced SHM & Resonance (page 105 – 106)..")
4
Definition of SHM Repeated motion where the acceleration is proportional to, and in the opposite direction to, the displacement This is an essential definition learn it by heart it appears somewhere in almost all NCEA L3 papers

5
Oscillatory motion is motion that occurs periodically over and over again. E.g. rotation of the earth on its axis, rise and fall of tides in the ocean; vibration of a guitar string; regular beating of the human heart. Common type of oscillatory motion is Simple Harmonic Motion (SHM). Object moves back and forth regularly over the same path. E.g. Wave motion (seismic/sound/water) Vibrations of molecules gases of the atmosphere Movement of electrons in circuits.
. Object moves back and forth regularly over the same path. E.g. Wave motion (seismic/sound/water) Vibrations of molecules gases of the atmosphere Movement of electrons in circuits..")
6
SHM is a particle motion with an acceleration (a) that is directly proportional to the particle’s displacement (y) from a fixed point (rest point), and this acceleration always points towards the fixed point. Equilibrium point y A A y or DEFINITION OF SHM The negative value denotes that the acceleration is back towards the equilibrium point. The ‘y’ value could be ‘x’ but for a spring displacement is up & down.

7
A pendulum and a mass on a spring both undergo this type of motion which can be described by a SINE WAVE or a COSINE WAVE depending upon the start position. Displacement y Time t + A - A Equilibrium A = maximum amplitude possible from equilibrium point. A body will undergo SIMPLE HARMONIC MOTION when the force that tries to restore the object to its REST (EQUILIBRIUM) POSITION is PROPORTIONAL TO the DISPLACEMENT of the object.
 POSITION is PROPORTIONAL TO the DISPLACEMENT of the object..")
9
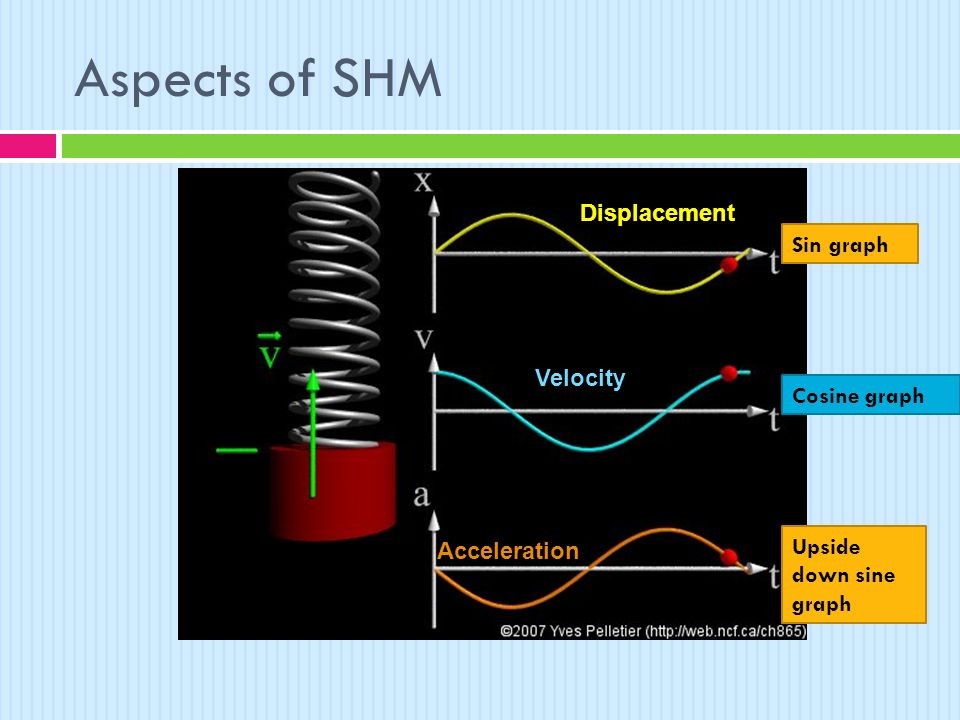
Aspects of SHM Displacement Velocity Acceleration Sin graph Cosine graph Upside down sine graph

10
Displacement y time Amplitude ( A ): The maximum distance that an object moves from its rest position. y = A and y = - A. + A - A Period ( T ): The time that it takes to execute one complete cycle of its motion. Units seconds, T Frequency ( f ): The number or oscillations the object completes per unit time. Units Hz = s -1. Angular Frequency ( ω ): The frequency in radians per second, 2 π per cycle.
: The time that it takes to execute one complete cycle of its motion. Units seconds, T Frequency ( f ): The number or oscillations the object completes per unit time. Units Hz = s -1. Angular Frequency ( ω ): The frequency in radians per second, 2 π per cycle..")
11
Example 1: During exercise, a runner’s heart beats at 60 times in 20 seconds. Later, while resting, her resting heart beats 36 times in 30 seconds. Calculate the frequency and period: a. During exercise b. At rest SOLUTION: a.60 beats in 20 seconds 60/20 beats per second = 3.0Hz T = 1/f = 1/3.0 T = 0.33s b.36 beats in 30 seconds 36/30 beats per second = 1.2 Hz T = 1/f = 1/1.2 T = 0.83s

12
SHM & CIRCULAR MOTION: SHM is closely connected to the motion of an object in a circle at a steady speed. One component (or one direction) of the circular motion moves exactly like SHM. E.g. The knee of a cyclist produces and up and down motion, SHM, but the result is that the back wheel goes round in a circle. As a result of this SHM follows all the rules of rotational motion. These rotational circles are called Phasor diagrams OR Reference Circles. One complete circle = 2 radsThe rest of the components of rotational motion are involved , , & .
 of the circular motion moves exactly like SHM. E.g. The knee of a cyclist produces and up and down motion, SHM, but the result is that the back wheel goes round in a circle. As a result of this SHM follows all the rules of rotational motion. These rotational circles are called Phasor diagrams OR Reference Circles. One complete circle = 2 radsThe rest of the components of rotational motion are involved , , & ..")
13
The Reference Circle Reference Circle The imaginary green point moves in a circle at constant speed ( ω). The vertical component of the green point’s motion is SHM Equilibrium Position

14
Rotational Motion and SHM SHM can be analysed by using our knowledge of circular motion; as the vertical component of circular motion of the reference circle is the same as SHM

15
1 2 3 4 Always work anticlockwise from equilibrium point. Object oscillates at a speed of . 1.Is moving down at max displacement ‘A’. 2.Has moved rad of the circle at equilibrium point. 3.Max ‘A’ changing direction therefore max ‘a’. 4.Now moving upwards moved through 1 ½ + rad PHASOROSCILLATING OBJECT

16
Your turn Read ESA pg145-147 Use this reading to supplement your PowerPoint notes Complete Activity 10A.

17
Rotational equations: = / t = 2 / T = 2 f As f = 1/T For 1 revolution = 2 t = T It stands to reason that: Maximum displacement is given by the radius of the circle, ‘A’. Maximum translational velocity, v max = A Maximum translational acceleration, a max = A 2

18
EQUATION OF SHM x x a a Acceleration – Displacement graph Gradient = - ω 2 + A - A MAXIMUM ACCELERATION = ± ω 2 A

19
Example 2: The tides go up and down with SHM. The period of the tides is 12 hours. a. Calculate the cyclic frequency, f, of the tides. b. Calculate the angular frequency, , of the tides c. A boat is tied up alongside a wharf at exactly low tide. How long will it take the boat to rise 1.7m up the side of the wharf if the total rise of the tide is 5.4m? SOLUTION: a. Period is 12 hours, T = 12 x 60 x 60 s = 43 200s f = 1/T = 2.3 x 10 -5 Hz

20
b. = 2 f = 2 x x 2.314815 x 10 -5 = 1.5 x 10 -4 rads -1 c. While the boat rises a distance of 1.7m the displacement phasor turns through an angle . 5.4m 1.7m A A Yellow triangle: cos = (A – 1.7) /A = (2.7 – 1.7)/2.7 = 1.19 rad But = t t = 1.19/1.45 x 10 -4 = 8191.3877s = 2.3 hours
 /A = (2.7 – 1.7)/2.7 = 1.19 rad But = t t = 1.19/1.45 x = s = 2.3 hours.")
21
To find a proportion of the circle i.e. or the height after a certain portion of the circle has been travelled, we need to produce a right angle triangle with the displacement, , the hypotenuse, ‘A’ and opposite, y. Y A NB: if & t given then can be calculated. From this we are able to determine : 1. Displacement 2. Velocity 3. Acceleration equations at any point of the phasor or reference circle.

22
Aspects of SHM Displacement Velocity Acceleration Sin graph Cosine graph Upside down sine graph

23
DISPLACEMENT A y Y A From this we are able to find any size of displacement ‘y’, using the triangle and the following equation: y = A sin t BUT = t y = A sin

24
Example 3: A pendulum swings with a period of 1.9s and the bob has amplitude 0.14m. Calculate the distance of the pendulum bob from the central position: a. 0.35s after the timing starts b. 1.1s after the timing starts SOLUTION: a. y = A sin t = 0.14 x sin(2 /1.9 x 0.35)[substituting = 2 /T] = 0.13m b. y = A sin t = 0.14 x sin(2 /1.9 x 1.1) = -0.067m y = 0.067m in the opposite direction
[substituting = 2 /T] = 0.13m b. y = A sin t = 0.14 x sin(2 /1.9 x 1.1) = m y = 0.067m in the opposite direction.")
25
Velocity The direction of the velocity of an object with circular motion is always changing. The size can be found by v=r The velocity of the SHM will be the component of the velocity in the direction of the SHM The direction and length of the velocity vector will always be changing. When the object is at the end position-no component in direction of SHM When the object is at the equilibrium position-whole vector in direction of SHM

26
VELOCITY A v AA From this we are able to find any size of velocity ‘v’, using the triangle and the following equation: v = A cos v AA BUT = t v = A cos t

27
Example 4: The pendulum in example 3, swings with a period of 1.9s and the bob has amplitude 0.14m. Calculate the velocity of the pendulum bob: a. 0.35s after the timing starts b. 1.1s after the timing starts SOLUTION: a. v = A cos t = 0.14 x (2 /1.9) x cos(2 /1.9 x 0.35)[substituting = 2 /T] = 0.19ms -1 b. v = A cos t = 0.14 x (2 /1.9) x cos(2 /1.9 x 1.1) = -0.41ms -1 v = 0.41ms -1 in the opposite direction
 x cos(2 /1.9 x 0.35)[substituting = 2 /T] = 0.19ms -1 b. v = A cos t = 0.14 x (2 /1.9) x cos(2 /1.9 x 1.1) = -0.41ms -1 v = 0.41ms -1 in the opposite direction.")
28
Acceleration Find acceleration using acceleration phasor. Direction of acceleration during circular motion is towards the centre of the circle. When object at end position-whole vector is the SHM component. When object at equilibrium position-no vector in direction of SHM.

29
ACCELERATION a A2A2 From this we are able to find any size of acceleration ‘a’, using the triangle and the following equation: a = - A 2 sin a A2A2 BUT = t a = - A 2 sin t a = v 2 /r & v = r Centripetal acc acts to centre thus: a = v 2 /A = (A ) 2 /A a = A 2
 2 /A a = A 2")
30
Example 5: The pendulum in examples 3 & 4, swings with a period of 1.9s and the bob has amplitude 0.14m. Calculate the acceleration of the pendulum bob: a. 0.35s after the timing starts b. 1.1s after the timing starts SOLUTION: a. a = - A 2 sin t = - 0.14 x (2 /1.9) 2 x sin(2 /1.9 x 0.35)[substituting = 2 /T] = - 1.4ms -2 b. a = - A 2 sin t = - 0.14 x (2 /1.9) 2 x sin(2 /1.9 x 1.1) = - - 0.73ms -2 a = 0.73ms -2 in the upward direction
 2 x sin(2 /1.9 x 0.35)[substituting = 2 /T] = - 1.4ms -2 b. a = - A 2 sin t = x (2 /1.9) 2 x sin(2 /1.9 x 1.1) = ms -2 a = 0.73ms -2 in the upward direction.")
31
Displacement x Velocity v Acceleration a t t t Velocity = gradient of displacement- time graph Maximum velocity in the middle of the motion ZERO velocity at the end of the motion Acceleration = gradient of velocity - time graph Maximum acceleration at the end of the motion – where the restoring force is greatest! ZERO acceleration in the middle of the motion. Note direction opposite to displacement, going negative here. Note that in this graph the timing starts when y is maximum hence the cosine instead of sine

32
Note: The following equations: v = A cos t y = A sin t a = - A 2 sin t Only apply when the object is at equilibrium position and moving in a positive direction, anticlockwise when timing starts. If timing starts when y = A i.e. at max amplitude then the equations are used as follows: y = A cos t v = A sin t a = - A 2 cos t

33
Displacement x Velocity v Acceleration a t t t Velocity = gradient of displacement- time graph Maximum velocity in the middle of the motion ZERO velocity at the end of the motion Acceleration = gradient of velocity - time graph Maximum acceleration at the end of the motion – where the restoring force is greatest! ZERO acceleration in the middle of the motion. Note direction opposite to displacement, going negative here. Note that in this graph the timing starts when y is maximum hence the cosine instead of sine

34
COMPLETE EXERCISES PAGE 92 - 101 RUTTER

35
MASS ON A SPRING M F = -ky y M Stretch & Release A M M k = the spring constant in N m - 1 If two springs are attached to a mass ‘k’ is the combined spring constants for both springs. Equation is the same.

36
Example 6: When a 0.40kg mass is attached to a spring suspended vertically, its length increases from 27.0cm to 35.0cm. Find the spring constant and period of oscillation. SOLUTION: The extension y = 35.0 – 27.0 = 8.0cm or -0.080m as the extension is opposite to the force. k = f/-y = 3.92/0.080 = 49Nm -1 T = 2 (m/k) = 2 (0.40/49) = 0.57s
 = 2 (0.40/49) = 0.57s.")
37
THE PENDULUM l The period, T, is the time for one complete cycle. Where l = length of string (m); g = gravitational acceleration (ms -2 )
; g = gravitational acceleration (ms -2 ).")
40
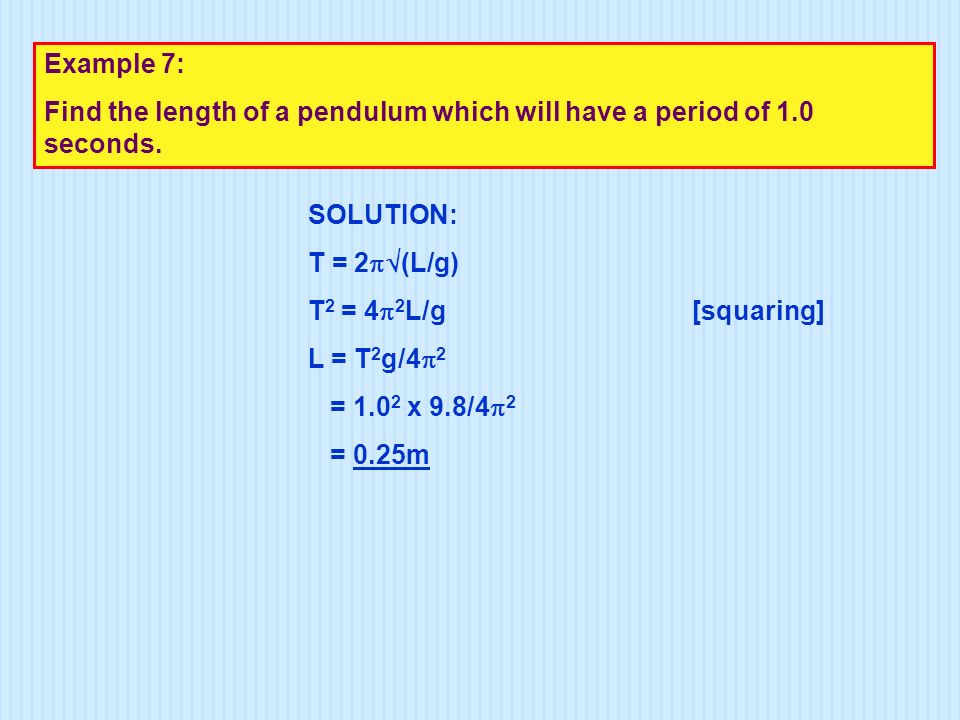
Example 7: Find the length of a pendulum which will have a period of 1.0 seconds. SOLUTION: T = 2 (L/g) T 2 = 4 2 L/g[squaring] L = T 2 g/4 2 = 1.0 2 x 9.8/4 2 = 0.25m
 T 2 = 4 2 L/g[squaring] L = T 2 g/4 2 = x 9.8/4 2 = 0.25m.")
41
COMPLETE EXERCISES PAGE 102 - 104 RUTTER

42
ENERGY IN SHM potential E P Kinetic E K Potential E P PENDULUMSPRING M M M potential kinetic E TOTAL = E p + E K

43
ENERGY IN A SPRING E k when the mass moves though 0 at max speed E p when the spring is at max compression & momentarily stopped. 0 E k again as the mass moves back through 0 at max speed. E p as the spring is a max extension & the mass is momentarily stopped. E k again as the mass moves back through 0 at max speed. At intermediate positions, the energy is partly E p and E k

44
The total energy is the energy stored in the spring when it was initially extended by the amplitude of the SHM. Total E = ½kA 2 At any instant, the kinetic energy is the total energy less the potential energy. E k = ½kA 2 - ½ky 2

45
Example 8: An object of mass 0.35kg bounces vertically on the end of a spring that has a force constant of 110Nm -1. The amplitude of the SHM is 25cm (0.25m) a. Calculate the total energy in the oscillating system b. Calculate the maximum speed of the object. c. Calculate the speed of the object when the displacement is 15cm. SOLUTION: a.Total E = ½kA 2 = 0.3 x 110 x 0.25 2 = 3.4J b. ½mv 2 = 3.4375 = 4.4ms -1 c. ½mv 2 = 3.4375 - ½k x 0.15 2 v = 3.5ms -1
 a. Calculate the total energy in the oscillating system b. Calculate the maximum speed of the object. c. Calculate the speed of the object when the displacement is 15cm. SOLUTION: a.Total E = ½kA 2 = 0.3 x 110 x = 3.4J b. ½mv 2 = = 4.4ms -1 c. ½mv 2 = ½k x v = 3.5ms -1.")
46
ENERGY IN A PENDULUM In a pendulum as we saw earlier the main energies are E p and E k. Energy is applied to the bob by pulling it to one side gaining gravitational potential energy. h A At end positions E k = 0 & max potential energy. At centre position E p = 0 & max kinetic energy. Between these positions the energy is partly E k & E p. E p = mghE k = ½mv 2

47
Example 9: A pendulum has a bob of mass 0.15kg. To set it in SHM, the bob is pulled aside until it has gained a height of 0.092m. a. Calculate the total energy of the SHM. b. Calculate the maximum speed of the bob. SOLUTION: a.Total E = mgh = 0.15 x 9.8 x 0.092 = 0.14J b. ½mv 2 = 0.13524 v = 1.3ms -1

48
ENERGY IN SHM Energy Change with POSITION = kinetic = potential= TOTAL ENERGY, E Energy Change with TIME x -A+A 0 energy E time TT/2 N.B. Both the kinetic and the potential energies reach a maximum TWICE in on cycle. E

49
Example 10: A pendulum of length 2.5m and mass 5.0kg swings with a amplitude of 0.40m. Find a. The period T. b. The angular frequency, . c. The total energy of the SHM. d. The potential energy at the point where the mass is moving with a speed of 5.0ms -1. SOLUTION: a. T = 2 (l/g) = 2 (2.5/9.8) = 3.2s b. = 2 /T = 2 /3.1734 = 2.0rads -1 c. Total E = ½mv max 2 = ½m(A ) 2 = 1.6J
 = 2 (2.5/9.8) = 3.2s b. = 2 /T = 2 / = 2.0rads -1 c. Total E = ½mv max 2 = ½m(A ) 2 = 1.6J.")
50
d. When the mass is moving at 0.50ms -1 : E k = ½ x 5.0 x 0.50 2 = 0.625J E p = E k TOT – E k = 1.56800 – 0.625 = 0.94J

51
time DAMPING DISPLACEMENT INITIAL AMPLITUDE THE AMPLITUDE DECAYS EXPONENTIALLY WITH TIME The causes of damping often can be friction and air resistance which generate heat and thus loss of energy. Also if there is rubbing of particles again friction will result.

52
RESONANCE: This is where a driving force causes an object to oscillate. This matches the natural frequency of the object causing a larger amplitude. This can produce some interesting effects: Musical instruments often produce sound by resonating such as strings or columns of air. Radio receivers work because a resonant electric circuit can be tuned to radio waves of a particular frequency. Buildings and bridges have a natural frequency of oscillation. Engineers must design them to make sure that seismic vibrations, winds or basic walking do not cause damaging resonance. E.g. 1940 USA, Tacoma Narrows suspension bridge was destroyed by high winds causing the bridge to shake itself to pieces & the Millennium bridge in London, UK.

58
COMPLETE EXERCISES PAGE 105 - 106 RUTTER

Similar presentations












 Simple Harmonic Motion (SHM)>")







 Ltd. 7.9 Examples of forced vibration.>")

 - Velocity - Acceleration II. Force law for SHM - Simple linear harmonic oscillator - Simple linear.>")