Download presentation
Presentation is loading. Please wait.

1
The Use of Mathematica in Control Engineering Linear Model Descriptions Linear Model Transformations Linear System Analysis Tools Design/Synthesis Techniques Pole Assignment Model-Reference Optimal Control PID Controller Concluding Remarks Neil Munro Control Systems Centre UMIST Manchester, England.

2
Linear Model Descriptions The Control System Professional currently provides several ways of describing linear system models; e.g. 1For systems described by the state-space equations where y is a vector of the system outputs u is a vector of the system inputs and x is a vector of the system state-variables 2For systems described by transfer-function relationships where s is the complex variable

3
Examples: - ss = StateSpace[{{0, 0, 1, 0},{0, 0, 0, 1}, {-(a b), 0, a+b, 0},{0, -(a b), 0, a+b}}, {{0, 0},{0, 0},{1, 0},{0, 1}},{{-b, -a, 1, 1}}]
![Examples: - ss = StateSpace[{{0, 0, 1, 0},{0, 0, 0, 1}, {-(a b), 0, a+b, 0},{0, -(a b), 0, a+b}}, {{0, 0},{0, 0},{1, 0},{0, 1}},{{-b, -a, 1, 1}}]](http://images.slideplayer.com/23/6868052/slides/slide_3.jpg "Examples: - ss = StateSpace[{{0, 0, 1, 0},{0, 0, 0, 1}, {-(a b), 0, a+b, 0},{0, -(a b), 0, a+b}}, {{0, 0},{0, 0},{1, 0},{0, 1}},{{-b, -a, 1, 1}}]")
4
tf = TransferFunction[s,{{1/(s-a),1/(s-b)}}]
![tf = TransferFunction[s,{{1/(s-a),1/(s-b)}}]](http://images.slideplayer.com/23/6868052/slides/slide_4.jpg "tf = TransferFunction[s,{{1/(s-a),1/(s-b)}}]")
5
New Data Formats have been implemented, for these objects, which are fully editable, as follows: - ss = StateSpace[{{0, 0, 1, 0},{0, 0, 0, 1}, {-(a b), 0, a+b, 0},{0, -(a b), 0, a+b}}, {{0, 0},{0, 0},{1, 0},{0, 1}},{{-b, -a, 1, 1}}] now results in the composite data matrix
![New Data Formats have been implemented, for these objects, which are fully editable, as follows: - ss = StateSpace[{{0, 0, 1, 0},{0, 0, 0, 1}, {-(a b), 0, a+b, 0},{0, -(a b), 0, a+b}}, {{0, 0},{0, 0},{1, 0},{0, 1}},{{-b, -a, 1, 1}}] now results in the composite data matrix](http://images.slideplayer.com/23/6868052/slides/slide_5.jpg "New Data Formats have been implemented, for these objects, which are fully editable, as follows: - ss = StateSpace[{{0, 0, 1, 0},{0, 0, 0, 1}, {-(a b), 0, a+b, 0},{0, -(a b), 0, a+b}}, {{0, 0},{0, 0},{1, 0},{0, 1}},{{-b, -a, 1, 1}}] now results in the composite data matrix")
6
tfsys = TransferFunction[s, {{((s+2)(s+3))/(s+1)^2,1/(s+1)^2}, {(s+2)/(s+1)^2,(s+1)/((s+1)^2(s+3))}, {1/(s+2),1/(s+1)}}] which now yields
![tfsys = TransferFunction[s, {{((s+2)(s+3))/(s+1)^2,1/(s+1)^2}, {(s+2)/(s+1)^2,(s+1)/((s+1)^2(s+3))}, {1/(s+2),1/(s+1)}}] which now yields](http://images.slideplayer.com/23/6868052/slides/slide_6.jpg "tfsys = TransferFunction[s, {{((s+2)(s+3))/(s+1)^2,1/(s+1)^2}, {(s+2)/(s+1)^2,(s+1)/((s+1)^2(s+3))}, {1/(s+2),1/(s+1)}}] which now yields")
7
New Data Objects Four new data objects have been introduced; namely, 1.Rosenbrock’s system matrix in polynomial form 2.Rosenbrock’s system matrix in state- space form 3.The right matrix-fraction description of a system 4.The left matrix-fraction description of a system.

8
The system matrix in polynomial form provides a compact description of a linear dynamical system described by arbitrary ordered differential equations and algebraic relationships, after the application of the Laplace transform with zero initial conditions; namely where , u and y are vectors of the Laplace transformed system variables. This set of equations can equally be written as

9
If the system description is known in state- space form then a special form of the system matrix can be constructed, known as the system matrix in state-space form, as shown below The system matrix in polynomial form is then defined as When a system matrix in polynomial form is being created, it is important to note that the dimension of the square matrix T(s) must be adjusted to be r, where r is the degree of Det[T(s)].
![If the system description is known in state- space form then a special form of the system matrix can be constructed, known as the system matrix in state-space form, as shown below The system matrix in polynomial form is then defined as When a system matrix in polynomial form is being created, it is important to note that the dimension of the square matrix T(s) must be adjusted to be r, where r is the degree of Det[T(s)].](http://images.slideplayer.com/23/6868052/slides/slide_9.jpg "If the system description is known in state- space form then a special form of the system matrix can be constructed, known as the system matrix in state-space form, as shown below The system matrix in polynomial form is then defined as When a system matrix in polynomial form is being created, it is important to note that the dimension of the square matrix T(s) must be adjusted to be r, where r is the degree of Det[T(s)].")
10
Matrix Fraction Forms Given a system description in transfer function matrix form G(s), for certain analysis and design purposes; e.g. the H- approach to robust control system design; it is often convenient to express this model in the form of a left or right matrix- fraction description; e.g. 1.A left matrix-fraction form of a given transfer function matrix G(s) might be 2A right matrix fraction form of a given transfer function matrix G(s) might be
 might be 2A right matrix fraction form of a given transfer function matrix G(s) might be.")
11
Linear Model Transformations G(s) [A, B, C, D] G(s) System Matrix P(s) in polynomial form [A, B, C, D] System Matrix P(s) in state-space form [T(s),U(s),V(s),W(s)] System Matrix P(s) in polynomial form P 1 (s) P 2 (s) G(s) Least Order
![Linear Model Transformations G(s) [A, B, C, D] G(s) System Matrix P(s) in polynomial form [A, B, C, D] System Matrix P(s) in state-space form [T(s),U(s),V(s),W(s)] System Matrix P(s) in polynomial form P 1 (s) P 2 (s) G(s) Least Order](http://images.slideplayer.com/23/6868052/slides/slide_11.jpg "Linear Model Transformations G(s) [A, B, C, D] G(s) System Matrix P(s) in polynomial form [A, B, C, D] System Matrix P(s) in state-space form [T(s),U(s),V(s),W(s)] System Matrix P(s) in polynomial form P 1 (s) P 2 (s) G(s) Least Order")
12
New Data Transformations All data formats are fully editable tfsys = TransferFunction[s, {{((s+2)(s+3))/(s+1)^2,1/(s+1)^2}, {(s+2)/(s+1)^2,(s+1)/((s+1)^2(s+3))}, {1/(s+2),1/(s+1)}}] rff = RightMatrixFraction[tfsys] ss = StateSpace[tfsys] rff = RightMatrixFraction[ss,s]
![New Data Transformations All data formats are fully editable tfsys = TransferFunction[s, {{((s+2)(s+3))/(s+1)^2,1/(s+1)^2}, {(s+2)/(s+1)^2,(s+1)/((s+1)^2(s+3))}, {1/(s+2),1/(s+1)}}] rff = RightMatrixFraction[tfsys] ss = StateSpace[tfsys] rff = RightMatrixFraction[ss,s]](http://images.slideplayer.com/23/6868052/slides/slide_12.jpg "New Data Transformations All data formats are fully editable tfsys = TransferFunction[s, {{((s+2)(s+3))/(s+1)^2,1/(s+1)^2}, {(s+2)/(s+1)^2,(s+1)/((s+1)^2(s+3))}, {1/(s+2),1/(s+1)}}] rff = RightMatrixFraction[tfsys] ss = StateSpace[tfsys] rff = RightMatrixFraction[ss,s]")
13
tfsys = TransferFunction[s, {{(s+1)/(s^2+2s+1)},{(s+2)/(s+1)}}] ps = SystemMatrix[tfsys,TargetForm RightFraction] rff = RightMatrixFraction[ps] TransferFunction[%] ps = SystemMatrix[tfsys,TargetForm LeftFraction] lf = LeftFractionForm[ ] New Data Transformations
![tfsys = TransferFunction[s, {{(s+1)/(s^2+2s+1)},{(s+2)/(s+1)}}] ps = SystemMatrix[tfsys,TargetForm RightFraction] rff = RightMatrixFraction[ps] TransferFunction[%] ps = SystemMatrix[tfsys,TargetForm LeftFraction] lf = LeftFractionForm[ ] New Data Transformations](http://images.slideplayer.com/23/6868052/slides/slide_13.jpg "tfsys = TransferFunction[s, {{(s+1)/(s^2+2s+1)},{(s+2)/(s+1)}}] ps = SystemMatrix[tfsys,TargetForm RightFraction] rff = RightMatrixFraction[ps] TransferFunction[%] ps = SystemMatrix[tfsys,TargetForm LeftFraction] lf = LeftFractionForm[ ] New Data Transformations")
14
tfsys =TransferFunction[s, {{(s+1)/(s^2+2s+1)},{(s+2)/(s+1)}] rff = RightMatrixFraction[tfsys] dt = ToDiscreteTime[tfsys,Sampled->20]//Simplify
![tfsys =TransferFunction[s, {{(s+1)/(s^2+2s+1)},{(s+2)/(s+1)}] rff = RightMatrixFraction[tfsys] dt = ToDiscreteTime[tfsys,Sampled->20]//Simplify](http://images.slideplayer.com/23/6868052/slides/slide_14.jpg "tfsys =TransferFunction[s, {{(s+1)/(s^2+2s+1)},{(s+2)/(s+1)}] rff = RightMatrixFraction[tfsys] dt = ToDiscreteTime[tfsys,Sampled->20]//Simplify")
15
SystemMatrix[dt,TargetForm->RightFraction] SystemMatrix[dt] RightMatrixFraction[%] New Data Transformations
![SystemMatrix[dt,TargetForm->RightFraction] SystemMatrix[dt] RightMatrixFraction[%] New Data Transformations](http://images.slideplayer.com/23/6868052/slides/slide_15.jpg "SystemMatrix[dt,TargetForm->RightFraction] SystemMatrix[dt] RightMatrixFraction[%] New Data Transformations")
16
A Least-Order form of a System-Matrix in polynomial form is one in which there are no input-decoupling zeros and no output-decoupling zeros, and would yield a minimal state-space realization, when directly converted to state-space form. For example, the polynomial system matrix is not least order, since T(s) and U(s) have 3 input-decoupling zeros at s = {0, 0, -1}; i.e. [T(s) U(s)] has rank 4 at these values of s.
 and U(s) have 3 input-decoupling zeros at s = {0, 0, -1}; i.e. [T(s) U(s)] has rank 4 at these values of s..")
17
Hence

18
System Analysis Controllable[ss] Observable[ss] ss =[A, B, C, D] SmithForm[T(s) U(s)] McMillanForm[G(s)] Controllable[ps] Observable[ps] Decoupling Zeros Controllable[ps] Observable[ps] Decoupling Zeros MatrixLeftGCD[T(s) U(s)] MatrixRightGCD[T(s) V(s)]
![System Analysis Controllable[ss] Observable[ss] ss =[A, B, C, D] SmithForm[T(s) U(s)] McMillanForm[G(s)] Controllable[ps] Observable[ps] Decoupling Zeros Controllable[ps] Observable[ps] Decoupling Zeros MatrixLeftGCD[T(s) U(s)] MatrixRightGCD[T(s) V(s)]](http://images.slideplayer.com/23/6868052/slides/slide_18.jpg "System Analysis Controllable[ss] Observable[ss] ss =[A, B, C, D] SmithForm[T(s) U(s)] McMillanForm[G(s)] Controllable[ps] Observable[ps] Decoupling Zeros Controllable[ps] Observable[ps] Decoupling Zeros MatrixLeftGCD[T(s) U(s)] MatrixRightGCD[T(s) V(s)]")
19
Controllability and Observability In the same way that the controllability and observability of a system described by a set of state space equations can be determined in the Control System Professional by entering the commands Controllable[ss] and Observable[ss] where ss is a StateSpace object. These tests can now also be directly applied to a system matrix object by entering the commands Controllable[sm] and Observable[sm] where sm is a SystemMatrix object in either polynomial form or state space form.
![Controllability and Observability In the same way that the controllability and observability of a system described by a set of state space equations can be determined in the Control System Professional by entering the commands Controllable[ss] and Observable[ss] where ss is a StateSpace object.](http://images.slideplayer.com/23/6868052/slides/slide_19.jpg "These tests can now also be directly applied to a system matrix object by entering the commands Controllable[sm] and Observable[sm] where sm is a SystemMatrix object in either polynomial form or state space form..")
20
Preliminary Analysis Reduction of State-Space Equations Given a system matrix in state-space form then an input-decoupling zeros algorithm, implemented in Mathematica, reduces P(s) to The completely controllable part is then given by
 to The completely controllable part is then given by")
21
Gasifier Model Format A is 25 x 25B is 25 x 6 C is 4 x 25D is 4 x 6 Inputs:- 1 char 2 air 3 coal 4 steam 5 limestone 6 upstream disturbance Outputs:- 1 gas cv 2 bed mass 3 gas pressure 4 gas temperature

22
Preliminary Analysis The original 25 th order system is numerically very ill conditioned. The eigenvalues cover a significant range in the complex plane, ranging from -0.00033 to -33.1252. The condition number is 5.24 x 10 19. At = 0 the maximum and minimum singular values are 147500 and 50, respectively. The Kalman controllability and observability tests yield a rank of 1, and the controllability and observability gramians are :-

23
Preliminary Analysis Application of the decoupling zeros algorithm to [sI-A, B] yielded indicating that the system had 7 input-decoupling zeros, which was confirmed by transforming A and B to spectral form. Dimensions of
![Preliminary Analysis Application of the decoupling zeros algorithm to [sI-A, B] yielded indicating that the system had 7 input-decoupling zeros, which was confirmed by transforming A and B to spectral form.](http://images.slideplayer.com/23/6868052/slides/slide_23.jpg "Dimensions of.")
24
Coprime Factorizations

25
Smith and McMillan Forms The Smith form of a polynomial matrix and the McMillan form of a rational polynomial matrix are both important in control systems analysis. Consider an x m polynomial matrix N(s), then the Smith form of N(s) is defined as S(s) = L(s)N(s)R(s) and L(s) and R(s) are unimodular matrices.
, then the Smith form of N(s) is defined as S(s) = L(s)N(s)R(s) and L(s) and R(s) are unimodular matrices..")
26
Smith and McMillan Forms Consider now an x m rational polynomial matrix G(s), and let G(s) = N(s)/d(s) where d(s) is the monic least common denominator of G(s), then the McMillan form of G(s) is defined as where M(s) is the result of dividing the Smith form of N(s) by d(s), and cancelling out all common factors
, and let G(s) = N(s)/d(s) where d(s) is the monic least common denominator of G(s), then the McMillan form of G(s) is defined as where M(s) is the result of dividing the Smith form of N(s) by d(s), and cancelling out all common factors")
27
Pole Assignment PID Controller Nonlinear Systems Model-Order Reduction Robust NA Nyquist Array Optimal Control Model Ref. Opt. Control Design Methods Synthesis Methods

28
Design/Synthesis Methods Methods implemented are:- 1 Pole Assignment - Some Observations 2 Model-Reference Optimal Control 3 The Systematic Design of PID Controllers 4 Uncertain Nonlinear Systems 5 Robust Direct Nyquist Array Design Method 6 Model-Order Reduction

29
Pole Assignment Control Systems Centre - UMIST We consider four main types of approaches ACKERMANN’S FORMULA SPECTRAL APPROACH MAPPING APPROACH EIGENVECTOR METHODS

30
Control Systems Centre - UMIST Ackermann’s Formula Here is the controllability matrix of [A,b], and p c (s) is the desired closed-loop system characteristic polynomial. where Spectral Approach Here, i and i are the open-loop system and desired closed-loop system poles, respectively, and the v i ´ are the associated reciprocal eigenvectors.
![Control Systems Centre - UMIST Ackermann’s Formula Here is the controllability matrix of [A,b], and p c (s) is the desired closed-loop system characteristic polynomial.](http://images.slideplayer.com/23/6868052/slides/slide_30.jpg "where Spectral Approach Here, i and i are the open-loop system and desired closed-loop system poles, respectively, and the v i ´ are the associated reciprocal eigenvectors..")
31
Mapping Approach Control Systems Centre - UMIST The state-feedback matrix is given as where is the controllability matrix of [A, b] Here, the a i and i are the coefficients of the open-loop and closed-loop system characteristic polynomials, respectively.
![Mapping Approach Control Systems Centre - UMIST The state-feedback matrix is given as where is the controllability matrix of [A, b] Here, the a i and i are the coefficients of the open-loop and closed-loop system characteristic polynomials, respectively.](http://images.slideplayer.com/23/6868052/slides/slide_31.jpg "Mapping Approach Control Systems Centre - UMIST The state-feedback matrix is given as where is the controllability matrix of [A, b] Here, the a i and i are the coefficients of the open-loop and closed-loop system characteristic polynomials, respectively.")
32
Control Systems Centre - UMIST Eigenvector Methods It is also possible to determine the state- feedback pole assignment compensator as where the m i are randomly chosen scalars and the u c i are the closed-loop system eigenvectors calculated from Selecting m i =1, for example, the state- feedback compensator can be found as

33
Control Systems Centre - UMIST Comparison of Dyadic Methods under Numeric Considerations

34
Control Systems Centre - UMIST Comparison of Dyadic Methods under Symbolic Considerations

35
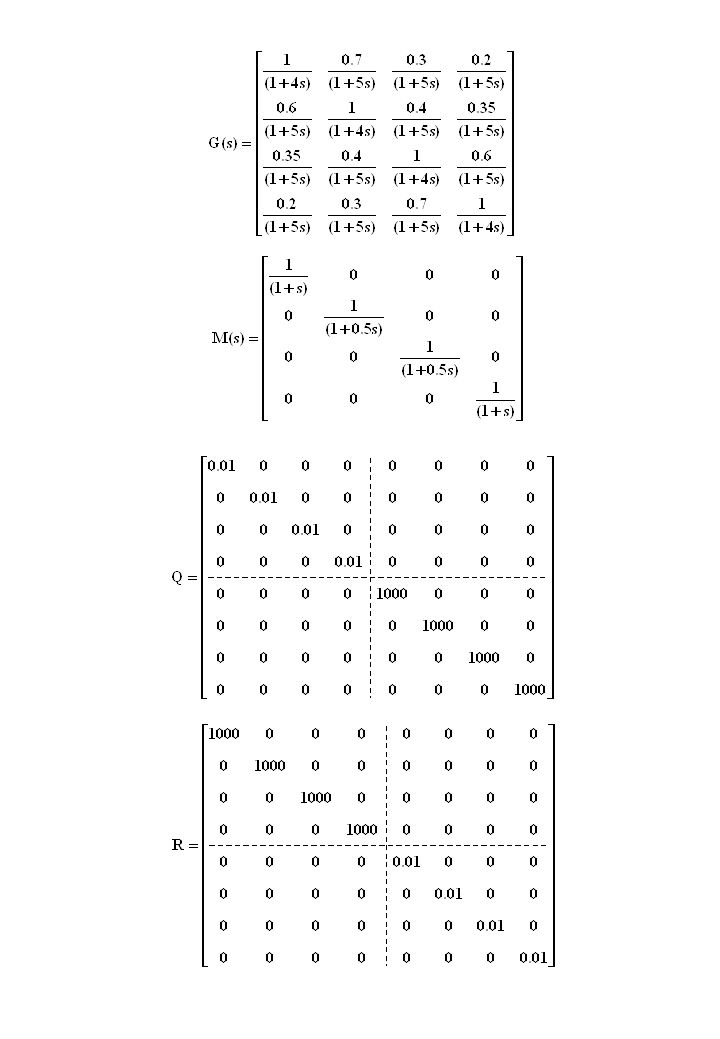
Model Reference LQR System Model-Reference Optimal Control The resulting optimal feedback controller K o can be partitioned as where K 11 and K 21 operate on the reference-model state vector x M and K 12 and K 22 operate on the system state vector x.

36
Model Reference LQR feedback paths. Model Reference LQR System Closed-Loop.

38
Unit-step on reference input 1 Unit-step on reference input 2 Unit-step on reference input 3 Unit-step on reference input 4

39
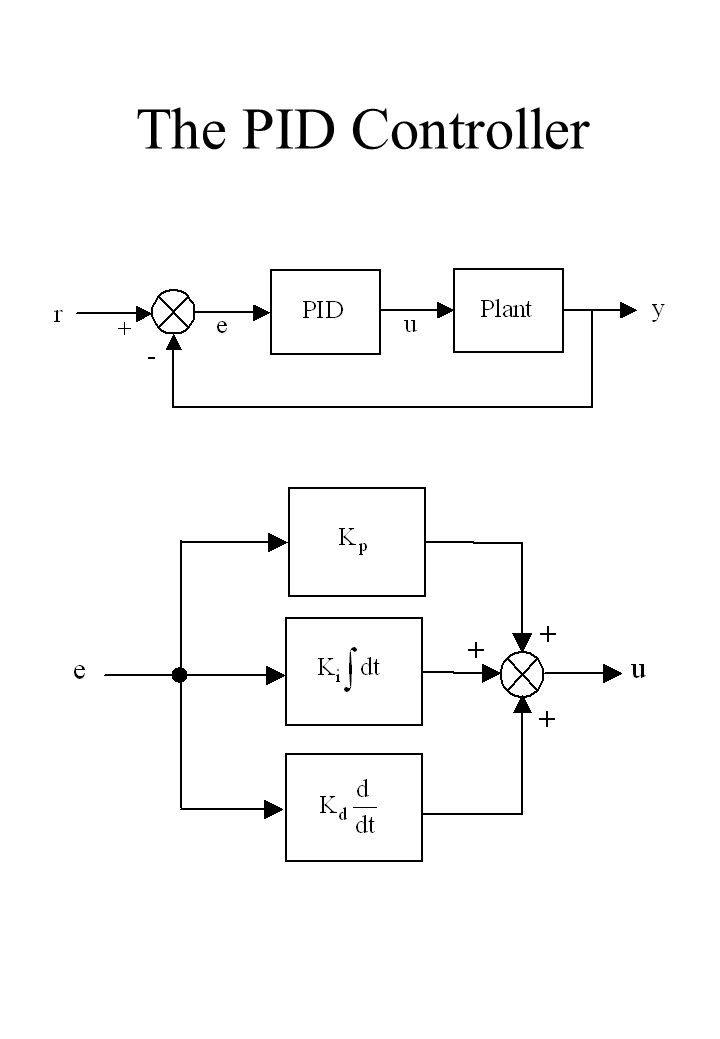
In recent years, several researchers have been re-examining the PID controller to determine the limiting K p, K i, and K d parameter values to guarantee a stable closed-loop system; namely, Keel and Bhattacharyya Ho, Datta, and Bhattacharyya Shafei and Shenton Astrom and Hagglund Munro and Soylemez The PID Controller

41
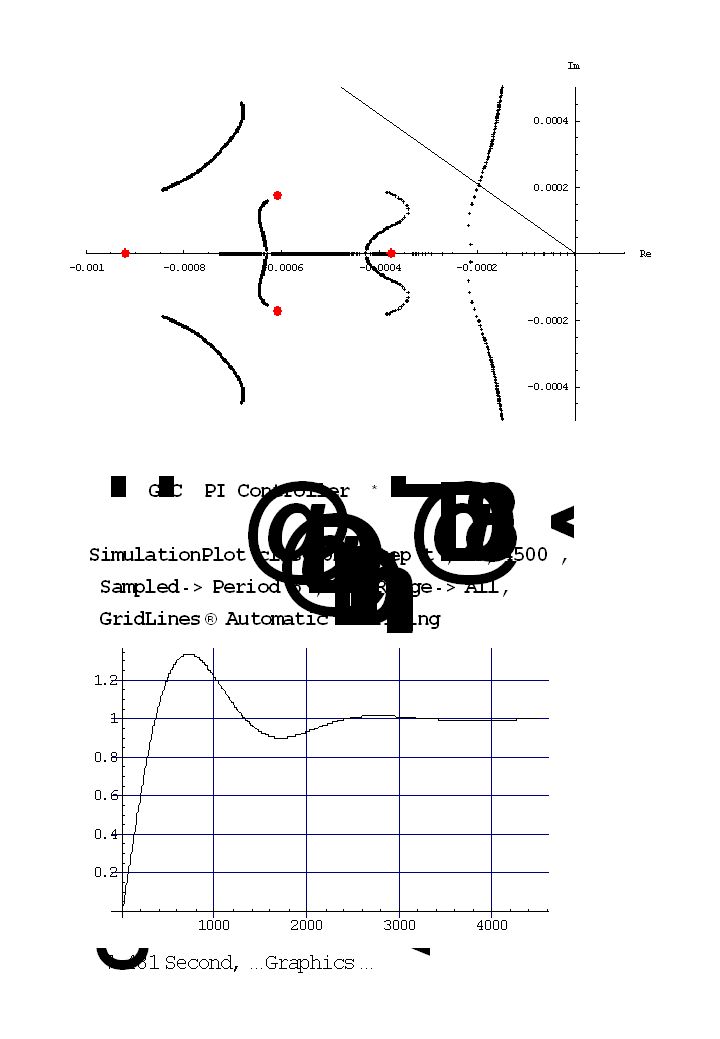
Test compensator arrangement Test compensator space

42
The Nyquist plot for Kp = 0.5 and Ki = 0.5 The admissible PI compensator space

44
Design Requirements Stability Performance Robustness Simplicity Transparency increasing difficulty

45
Acknowledgements My thanks to Dr Igor Bakshee of Wolfram Research for his interest and help in carrying out this work.

46
D-Stability Im Re d D = Sin( ) Control Systems Centre UMIST Control Systems Centre UMIST
 Control Systems Centre UMIST Control Systems Centre UMIST")
47
The Nyquist Plot Approach Here, we detect 5 axis crossings, (-2,+2,+2,-1,-1), where the last is due to the infinite arc, on the right, due to the pole at the origin. Control Systems Centre UMIST Control Systems Centre UMIST

48
The resulting stability boundary is The Nyquist Plot Approach Note that the origin is not included in the region because the basic system is unstable.

49
The Nyquist Plot Approach Here, with Kp = 5 and Ki = 18 the system is stable, even with an additional gain of k =1.3134 yielding closed-loop poles = -0.2519 ± 5.4879i -1.2320 ± 1.5258i -0.0161 ± 0.4510i Control Systems Centre UMIST Control Systems Centre UMIST

50
Diagonal Dominance Concepts Various definitions of Diagonal Dominance exist, namely :- Rosenbrock’s row/column form ~ R Limebeer’s Generalised Diagonal Dominance ~ L Bryant & Yeung’s Fundamental Dominance ~ Y where the conservatism of the resulting dominance criterion reduces as Y < L < R Code Mathematica Code

51
Nyquist Array Example

52
Gasifier Model Format A is 25 x 25B is 25 x 6 C is 4 x 25D is 4 x 6 Inputs:- 1 char 2 air 3 coal 4 steam 5 limestone 6 upstream disturbance Outputs:- 1 gas cv 2 bed mass 3 gas pressure 4 gas temperature

53
Combined Sequential Loop Closing and Diagonal Dominance Method This approach is a new combination of Bryant’s Sequential Loop Closing Approach with MacFarlane and Kouvaritakis’ ALIGN Algorithm, Edmunds’ Scaling and Normalization Technique, and Rosenbrock’s Diagonal Dominance. It is particularly appropriate in cases where a simple controller structure is desired. Advantages: –It can be implemented by closing one loop at a time. –Usually, the resulting control scheme is quite simple and can be easily realized in practice.

54
Achieving Diagonal Dominance Normalization : –Generates the input-output scaling to be applied to the system in order to minimize interaction. –Determines the best input-output pairing for control purposes. –Produces good diagonal dominance properties at low and intermediate frequencies. –Results are obtained by using simple, wholly real permutation matrices. High frequency decoupling : –Aims at improving the transient response of the system. –Emphasis is on frequencies close to the bandwidth, around which interaction is most severe. –Results are obtained by making use of wholly real matrices.

55
Preliminary Analysis The original 25 th order system is numerically very ill conditioned. The eigenvalues cover a significant range in the complex plane, ranging from -0.00033 to -33.1252. The condition number is 5.24 x 10 19. At = 0 the maximum and minimum singular values are 147500 and 50, respectively. The Kalman controllability and observability tests yield a rank of 1, and the controllability and observability gramians are :-

56
Preliminary Analysis Application of the decoupling zeros algorithm to [sI-A, B] yielded indicating that the system had 7 input-decoupling zeros, which was confirmed by transforming A and B to spectral form. Dimensions of
![Preliminary Analysis Application of the decoupling zeros algorithm to [sI-A, B] yielded indicating that the system had 7 input-decoupling zeros, which was confirmed by transforming A and B to spectral form.](http://images.slideplayer.com/23/6868052/slides/slide_56.jpg "Dimensions of.")
61
Design Procedure - 1 The Nyquist Array after an initial output scaling of diag{0.00001, 0.001, 0.001, 0.1} looks like :

62
Design Procedure - 2 The Nyquist Array after swapping the first two outputs (calorific value of fuel gas and bedmass) and closing the bedmass/char off-take loop is :
 and closing the bedmass/char off-take loop is :")
63
Design Procedure - 3 The Nyquist Array of the 3 x 3 subsystem after normalisation and high frequency decoupling at = 0.001 rad/sec is (where the outputs are pressure, temperature and calorific value of fuel gas) :
 :")
64
Design Summary Implement PI controller on bedmass/char-extraction loop. Scale inputs and outputs, to normalize them. Use ALIGN Algorithm for the remaining 3-input 3-output subsystem. Design a PI controller for the fast Calorific Value Loop. Design a PI controller for the fast Pressure Loop. Design a Lag-Lead controller for the remaining slow Temperature Loop. Output Scaling Gasifier Input Scaling constant decoupling bedmass PI temperature control pressure PI cv PI The control scheme resulting from this approach is as follows :

65
Controller Constant Pre-compensator Constant Post-compensator Dynamic Controller

66
Model Simplification

67
Root-locus diagram of g 1,1 (s) Model Simplification
 Model Simplification")
68
Control Systems Centre - UMIST Theorem: By using just the first input of a given MIMO system, it is almost always possible to arbitrarily assign 1 self conjugate poles of the system, and make these poles uncontrollable from the other inputs, provided that the system [A, b 1,C] has 1 controllable and observable poles, where b 1 is the first column of the input matrix (B), where This result can be compared with a previous result developed by Munro and Novin-Hirbod (1979) for the case of dynamic output feedback, where the degree r of the necessary compensator is given by
![Control Systems Centre - UMIST Theorem: By using just the first input of a given MIMO system, it is almost always possible to arbitrarily assign 1 self conjugate poles of the system, and make these poles uncontrollable from the other inputs, provided that the system [A, b 1,C] has 1 controllable and observable poles, where b 1 is the first column of the input matrix (B), where This result can be compared with a previous result developed by Munro and Novin-Hirbod (1979) for the case of dynamic output feedback, where the degree r of the necessary compensator is given by](http://images.slideplayer.com/23/6868052/slides/slide_68.jpg "Control Systems Centre - UMIST Theorem: By using just the first input of a given MIMO system, it is almost always possible to arbitrarily assign 1 self conjugate poles of the system, and make these poles uncontrollable from the other inputs, provided that the system [A, b 1,C] has 1 controllable and observable poles, where b 1 is the first column of the input matrix (B), where This result can be compared with a previous result developed by Munro and Novin-Hirbod (1979) for the case of dynamic output feedback, where the degree r of the necessary compensator is given by")
Similar presentations












 relates one input and one output: The following terminology.>")


 Processes 18.1 Process Interactions and Control Loop Interactions 18.2 Pairing of Controlled and Manipulated.>")
>")
 relates one input and one output: The following terminology.>")


 Dr. Imtiaz Hussain URL :http://imtiazhussainkalwar.weebly.com/>")

