Download presentation
Presentation is loading. Please wait.

1
دانشگاه صنعتی امیرکبیر دانشکده مهدسی پزشکی سمینار درس کنترل سیستمهای عصبی-عضلانی استاد درس: آقای دکتر توحیدخواه توسط: محمد علی احمدی پژوه پاییز 87 ناوبری در سیستمهای زیستی و مهندسی

2
Topics ► What is Navigation ► What parts of the brain contribute in navigation ► Hippocampus ► Models ► Research methods ► Disorders

3
Controller Musculoskeletal System Sensors Sensor Data Processing Planning Tasks Navigation Ref Motor Com

4
Two basic methods for dealing with space ► Sensory-motor interaction with the environment: look – find target – move towards target – look requires sensory access to environment requires sensory-motor coupling Knowledge in the world ► Representing space in memory, representing the problem, reasoning on basis of representation requires spatial memory and a representation of the environment requires spatial inference Knowledge in the head

5
Stars and other constellations helped sailors to figure out their position. The red arrow is pointing to the North Star, which is also known as Polaris.

6
This is a quadrant. A sailor would see the North Star along one edge, and where the string fell would tell approximately the ship’s latitude. A sailor could also use this astrolabe. You lined it up so the sun shone through one hole onto another, and the pointer would show your latitude.

7
Sailors didn’t even have good tools to tell where they were going! Look at these old charts. They were not very accurate. No wonder ships often sailed off course! These were made over hundreds of years by sailors observing the land from the ship.

8
In cognitive map of Toronto created by somebody from Toronto Personal Communication, Created by: Meaghan Ferguson, November 02, 2004 Mapquest.com, search engine: Google.ca Accessed Novemeber 03, 2004

9
Insects ► Bees ► Ants

10
Visual Landmarks ► Map of local landmarks coasts, rivers, valleys, mountain ranges: flyways? Finding nests, caches, fruiting trees: controlled by hippocampus of the brain, which controls spatial memory and cognitive memory: also well developed in cowbirds But, when cover homing pigeons with frosted lenses, they still find their way back to their loft

11
Solar Compass ► Kramer’s funnel ink experiments with starlings: can orient as long as they see the sun ► Matthews’ homing pigeons have a chronometer and understand the changing position of the sun relative to the direction of the destination to fly east at 6AM, you fly toward the sun, but because your internal clock tells you it is noon, you know that the sun is in the south and that to fly east, you must fly 90 degrees to the left of the sun ► Light bulb experiments train birds to feed out of a northwest food cup. When exposed to the sun, they continued to feed at this cup. When sun replaced by an immobile light bulb, shifted more and more to the left, thus compensating for the assumed change in position of the sun

12
Solar compass, cont. ► Clock-shifting experiments if you reset internal clocks using artificial photoperiods to a noon-to- midnight period. When release bird at noon, it will think that it is 6AM

13
Stellar compass ► Birds can also navigate on cloudy days and nights ► Radiotelemetry: thrushes fly 650 km on a firm compass bearing at night, meaning that they can compensate for the wind ► Planetarium experiments

14
Sunset cues ► Birds use polarized light from the setting sun

15
Geomagnetism, 1 ► Provides both a compass and a map ► Earth is a huge magnet: the magnetic and true poles are offset, which means that measuring the angular difference between true and magnetic north gives you your position on the earth’s surface.

16
Geomagnetism,2 ► Also provides compass because of the inclination of the magnetic field lines (poleward and equatorward) ► Walcott and Helmholtz coils
 ► Walcott and Helmholtz coils")
17
Reference Systems ► Need an external reference to figure out where to go. ► Critical for young birds: vagrancy use both geomagnetism and stellar patterns planetarium experiments with altered points of rotation need some sort of celestial orientation stellar cues are important at the start of migration, but then geomagnetism takes over

18
Integration of a Complex System ► Star compass with rotation most important during ontogeny ► Magnetic field most important during migration ► Sunset cues also important ► Landscape features

19
Factors influencing learning and use of information ► Age ► Individual differences Personality Social and cultural background Education ► Gender differences ► Visual impairment ► Familiarity and experience ► Effort effects (e.g. travel time)
.")
20
Sensory Organs

21
Inertial Navigation System

23
Gyroscope

24
► Sensors: External: ► Visual ► Hearing ► Vestibular ► Tactile ► Olfactory Internal: ► Muscle Spindle ► Golgi Organs ► Skin ► Joint Sensor

25
Scene Matching

26
GPS

28
Navigation and Orientation In Biosystems

29
Wayfinding

30
Wayfinding in Normals Uses geometric relations among multiple landmarks Learned associations between stimuli and responses Destination need not be visible Series of specific visible landmarks lead to one destination Flexible Inflexible

31
Wayfinding in Normals A.Route-based representations Linear: Describes information that encodes a sequential record of steps from a starting point, through landmarks, and finally to a destination Linear: Describes information that encodes a sequential record of steps from a starting point, through landmarks, and finally to a destination The coupling of landmarks and instructions The coupling of landmarks and instructions Grounded in an egocentric coordinate frame Grounded in an egocentric coordinate frame Inflexible Inflexible

32
Wayfinding in Normals B.Map-like Representations O’Keefe & Nadel, The Hippocampus as a Cognitive Map (1978): O’Keefe & Nadel, The Hippocampus as a Cognitive Map (1978): “Whereas a route specifies a starting point, a goal, and a particular direction of movement from the former to the latter, a map specifies none of these, either in its construction or usage. It can be used with equal facility to get from any particular place to any other. Additional flexibility derives from the freedom from specific objects and behaviors. If one path is blocked another can easily be found and followed.”(p. 87)
.")
33
Wayfinding in Normals C.Use of Different Navigational Strategies at Different Times Different conditions can lead humans to use different navigational strategies and environmental representations Different conditions can lead humans to use different navigational strategies and environmental representations What are these different conditions? What are these different conditions? The first is the kind of text description or view given: The first is the kind of text description or view given: Given aerial or survey descriptions, subjects tend to form map-like representations Given aerial or survey descriptions, subjects tend to form map-like representations Given more route-based descriptions, subjects tend to form route-based representations Given more route-based descriptions, subjects tend to form route-based representations The second is environmental characteristics: The second is environmental characteristics: Feature-poor environments lead to map-like representations Feature-poor environments lead to map-like representations Feature-rich environments lead to route-based representations Feature-rich environments lead to route-based representations

34
Spatial distortion How accurately are spatial relations represented in the mind? a) Distortion of distance (Berendt) b) Distortion of orientation c) Distortion of shape / configuration (Stevens / Coupe, Barkowsky) 11.3
 Distortion of distance (Berendt) b) Distortion of orientation c) Distortion of shape / configuration (Stevens / Coupe, Barkowsky)")
35
a)Distortion of distance Cognitive distance ≠ spatial distance B. Berendt 1998 11.3.1
Distortion of distance Cognitive distance ≠ spatial distance B. Berendt")
36
Jan Wiener Cognitive Distance and Route Selection 11.3.1.3

37
Experiment 1 Subjects view approaching a place, to the left is the landmark associated with that place. 11.3.1.4

38
Experiment 1 Schematic map of the environment, numbered circles represent places, different shades of gray represent the different regions (all places from one region carried landmarks belonging to the same category -> there was a car-, an animal- and an art-region) 11.3.1.5
")
39
Experiment 1 – example for a test route One of the critical navigation tasks in the test phase (after exploration- and test-phase) : the black rectangle represents the starting place, the black circles represent the target places. Subjects were instructed to visit all target places using the shortest possible route. 11.3.1.6

40
Results from 25 Subjects Subjects preferred routes that crossed fewer rather than more region boundaries Jan M. Wiener 11.3.1.7

41
Experiment 2 Birds-eye view of the virtual environment 11.3.1.8

42
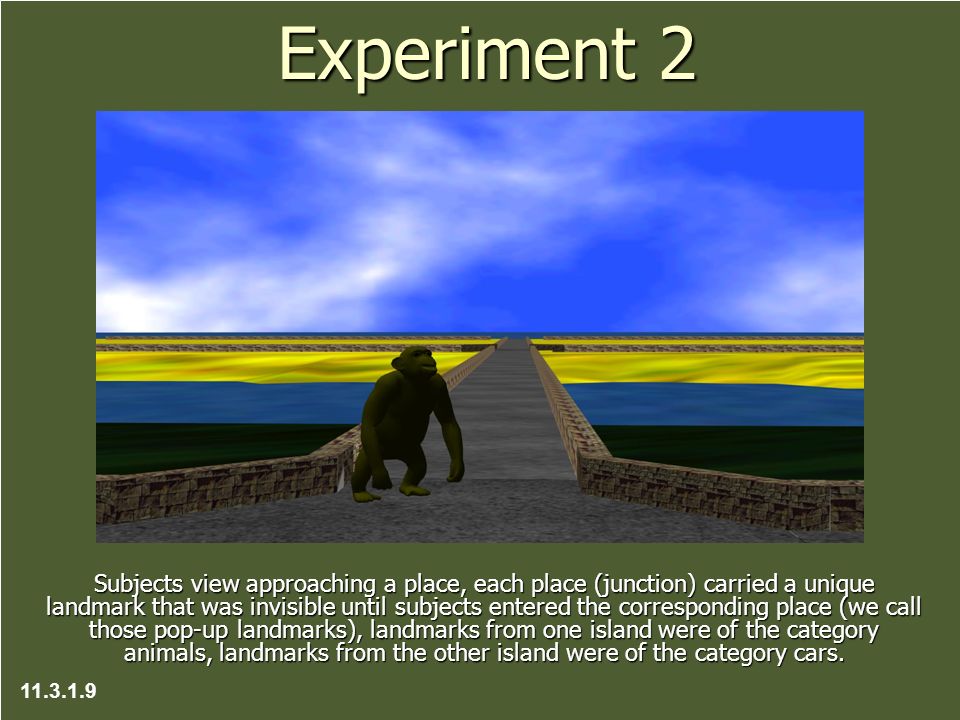
Experiment 2 Subjects view approaching a place, each place (junction) carried a unique landmark that was invisible until subjects entered the corresponding place (we call those pop-up landmarks), landmarks from one island were of the category animals, landmarks from the other island were of the category cars. 11.3.1.9
43
Experiment 2 Schematic map of the environment, numbered circle represent places, all places from one island carried landmarks belonging to the same category -> there was a car-, and an animal-island 11.3.1.10

44
Experiment 2- Examples for test routes Examples for the critical navigation tasks in the test phase (after exploration- and test-phase): the black rectangle represents the starting position, the black circle represents the target place. Subjects were instructed to find the shortest possible route. Note that there are at least two alternative optimal solutions 11.3.1.11

45
Experiment 2 - Results Results: subjects preferred routes that allowed for fastest access to the region containing the target. 11.3.1.12

46
Conclusion [Distance] ► Environmental regions influence human route planning behavior this suggests that regions are represented in human spatial memory (along the lines of hierarchical theories of spatial representation) ► Route planning takes into account region-connectivity and is not based on place-connectivity alone 11.3.1.13
![Conclusion [Distance] ► Environmental regions influence human route planning behavior this suggests that regions are represented in human spatial memory (along the lines of hierarchical theories of spatial representation) ► Route planning takes into account region-connectivity and is not based on place-connectivity alone](http://images.slideplayer.com/21/6277740/slides/slide_46.jpg "Conclusion [Distance] ► Environmental regions influence human route planning behavior this suggests that regions are represented in human spatial memory (along the lines of hierarchical theories of spatial representation) ► Route planning takes into account region-connectivity and is not based on place-connectivity alone")
47
► Cognitive orientation: Categorization of spatial orientation In orientation memory, we ‘idealize’ perceived angles to get closer to multiples of 90° Orientation 11.3.2

48
Distortion of shape / configuration ► Capacity restrictions do not allow us to represent all details ► Rather than leaving holes in our cognitive map, we represent coarse knowledge ► Shapes and configurations are simplified ► Representation requires fewer relations N Nevada California Reno San Diego 11.3.3

49
THE TEMPORAL LOBE

50
TL Function: Processes visual and auditory information, and integrates them for emotion, spatial navigation and spatial and object recognition. Includes all the tissue that lies below the Sylvian sulcus and anterior to the OL. Includes subcortical structures: limbic cortex, amygdala, and hippocampus.

51
TL Subdivisions of the TL Within the TL: Superior Temporal Gyrus: multimodal receiving inputs from auditory, visual and somatic regions as well as from the FC, PC and paralimbic cortex. Middle Temporal Gyrus: (Limbic cortex). Includes the amygdala, uncus, hippocampus, subiculum, entorhinal and perirhinal cortices and the fusiform gyrus. Inferior Temporal Gyrus: (Visual regions). Includes the fusiform gyrus, called TE.
. Includes the amygdala, uncus, hippocampus, subiculum, entorhinal and perirhinal cortices and the fusiform gyrus. Inferior Temporal Gyrus: (Visual regions). Includes the fusiform gyrus, called TE..")
52
TL Connections The TL receives afferents from the sensory systems, and sends efferents to parietal, frontal, limbic system and basal ganglia. 5 distinct types of cortico-cortical connections: 1. Hierarchical sensory pathway: From primary and secondary visual and auditory areas. Ventral stream. For stimulus recognition. 2. Dorsal auditory pathway: From auditory areas to PPC. For detecting spatial localization of auditory inputs. 3. Polymodal Pathway: parallel projections from the visual and auditory association areas into the STS. For stimulus categorization.

53
TL Connections cont… 4. Medial Temporal projection: from the visual and auditory association areas into the medial temporal or limbic. Called: perforant pathway. For long term memory. AAperirhinalentorhinalhippocampus amygdala 5. Frontal lobe projection: from the visual and auditory association areas into the FL. For movement control and short term memory.

54
TL Theory of TL Function On the basis of cortical anatomy 3 basic sensory functions: 1.Processing of auditory input 2.Visual object recognition 3.Long term storage of sensory input (memory) The TL is a WHAT system for auditory and visual info that is going to: 1.Identify 2.Categorize 3.Store 4.Give affect
 The TL is a WHAT system for auditory and visual info that is going to: 1.Identify 2.Categorize 3.Store 4.Give affect")
55
TL Symptoms of TL Damage 1.Disturbance of auditory sensation and perception 2.Disorders of music perception 3.Disorders of visual perception 4.Disorders in the selection of visual and auditory input 5.Impaired organization and categorization of sensory input 6.Inability to use contextual information 7.Impaired LTM 8.Altered personality and affective behavior 9.Altered sexual behavior

56
Short-term (seconds to hours) and long-term memory
 and long-term memory")
57
The effects of cortical lesions on maze performance

58
Information flow through the medial temporal lobe:

60
Role of the hippocampus in spatial learning and memory Anatomy of the hippocampus: connections from the entorhinal cortex and from the fornix.

61
Tri-synaptic pathway in the hippocampus: 1.Perforant path: from the entorhinal cortex to granule cells 2.Mossy fiber path: axons of granule cells synapse with CA3 cells 3.Schaffer collaterals of CA3 cells synapse with CA1 cells

62
www.benbest.com/science/ anatmind/anatmd7.html

63
تولید مسیر و برنامه ریزی حرکتی ► تولید سیگنال مرجع برای بخش کنترل حرکتی

64
مدلهای ارائه شده برای هیپوکامپ ► مدلهای مبتنی بر شبکه عصبی خود سازمانده ► مدلهای مبتنی بر شبکه بازگشتی ► مدلهای مبتنی بر شبکه رقابتی ► مدلهای آشوبی

65
Rat Brains, Hippocampus and Cognitive (Spatial) Maps Maja J. Mataric
 Maps Maja J. Mataric")
66
Effects of hippocampal lesions on spatial learning: 1. In humans, lesions to the hippocampus affect only certain types of memories; specifically declarative or episodic memories, but not procedural memories. 2. Episodic memories: memories for facts and events; procedural memories: riding a bicycle, playing tennis etc. 3. Lesions to the hippocampus also cause marked deficits in spatial learning tasks in rats.

67
Function: Vision: perception of form, movement and color. OL Separated from parietal lobe by: Parieto-occipital sulcus. Within the OL 3 landmarks: Calcrine fissure: Div. The upper and lower halves of the visual world. Lingual Gyrus: V2 & VP Fusiform Gyrus: V4

68
THE OCCIPITAL LOBE

69
Subdivisions of the OL (6+ Areas) OL 1.V1 2.V2 3.V3 4.V3A 5.V4 6.V5 Primary Visual Cortex Secondary Visual Cortex
 OL 1.V1 2.V2 3.V3 4.V3A 5.V4 6.V5 Primary Visual Cortex Secondary Visual Cortex")
70
V1 Largest area, called striate cortex. Receives the largest input from the LGN and projects to ALL other occipital regions. 1st processing level. V2 Also projects to all other occipital areas. Segregates info from V1. V1 V2 V3 (A) V4 V5 V2 V1 V3 (A) V4 V5 OLConnections
 V4 V5 V2 V1 V3 (A) V4 V5 OLConnections.")
71
2 Pathways into the visual brain OL Eye LGNV1V2 Dorsal (ParL) “How” or Where” Visual Guidence of mov. 1 Ventral (TempL) “What” Obj. perception & recog. Tectum (Sup Colli) Pulvinar (Thal) Medial Lateral 2 1.Geniculo-striate system 2.Tecto-pulvinar system Connections cont…
 What Obj. perception & recog. Tectum (Sup Colli) Pulvinar (Thal) Medial Lateral 2 1.Geniculo-striate system 2.Tecto-pulvinar system Connections cont….")
72
Visual processing in humans does NOT culminate in the Secondary visual ares (V3, V4, V5) but continues within multiple visual regions in the parietal, temporal and frontal lobes. Beyond the Occ. L OL

73
Theory of O.L Function V1 & V2 function like mailboxes: segregating info to other areas involved in the perception of: Color/Form/Motion V3Dynamic form (dancing) V3AJust form V4Color & Shape V5Perception of motion V2Like V1 but less severe V3Perception of form is affected V1If everything else intact, Ss act like if they were blind but visual input still gets through the other areas (V2) “BlindSight” V4Vision in gray shades V5Can’t perceive objects in motion Selective Lesions Affect specific functions
 V3AJust form V4Color & Shape V5Perception of motion V2Like V1 but less severe V3Perception of form is affected V1If everything else intact, Ss act like if they were blind but visual input still gets through the other areas (V2) BlindSight V4Vision in gray shades V5Can’t perceive objects in motion Selective Lesions Affect specific functions")
74
OL Theory of O.L Function Cont… 5 Types of visual functions 1.Vision for action: Visual processing required to direct specific movements. 2.Action for vision: Active search of the target object. Selective attention. 3.Visual Recognition: Ventral stream info to the temporal lobe specialized in recognition of faces “Grandmother cells” Grandma!

75
OL Theory of O.L Function Cont… 5 Types of visual functions 4.Visual Space: Visual info comes form specific location in space. Objects have a location relative to an individual (egocentric), or to one another (allocentric). 5.Visual Attention: Process of features of the visual world (otherwise it would be too much!).
, or to one another (allocentric). 5.Visual Attention: Process of features of the visual world (otherwise it would be too much!)..")
76
Dorsal & Ventral stream functions OL Milner & Goodale studies Patient DF: Blind but dorsal stream intact, so patient shaped her hand Appropriately while reaching. “Unconsciously” see location size and shape. Patient VK: Ventral stream intact, Can see objects but can’t reach Accurately or shape the hand.

77
OL 1. Agnosias 2. Monocular Blindness 3. Bitemporal Blindness Symptoms of OL Damage 6. Quadrantanopia 7. Scotoma 4. Nasal Hemianopia 5. Homonymous Hemianopia 1.Object Agnosia a) Apperceptive b) Associative 2.Other visual Agnosias Alexia Visual-spatial agnosia Prosopagnosia:
 Apperceptive b) Associative 2.Other visual Agnosias Alexia Visual-spatial agnosia Prosopagnosia:.")
78
1.Object Agnosia a) Apperceptive agnosia: Can’t recognize an object although basic visual functions (color, motion etc.) are preserved. Can’t copy or match simple objects. Can see one thing at a time: Simultagnosia. Diffuse bilateral lesion in the ventral stream in OL. b) Associative agnosia: Can’t recognize objects in spite of being to perceive them. Subjects can describe the object, know what it is for, copy it, but can’t identify it. Lesion in ventral stream in TL. Symptoms of OL Damage Cont… OL
 Associative agnosia: Can’t recognize objects in spite of being to perceive them. Subjects can describe the object, know what it is for, copy it, but can’t identify it. Lesion in ventral stream in TL. Symptoms of OL Damage Cont… OL.")
79
Function of OL is vision, perception of form movement and color. Three major routes: ventrally into the temporal lobe, dorsally into the parietal lobe, and a middle route going to the STS. Ventral stream for stimulus recognition, dorsal stream for guidance of movements in space. Some occipital regions are functionally asymmetrical: word recognition on the left and facial recognition and mental rotation on the right. Summary:

80
THE PARIETAL LOBE

81
PL Function: Processes and integrates somatosensory and visual info with regard to the control of movement. Separated from the frontal lobe By the central fissure, from the Temporal lobe by the Sylvian Fissure and from the occipital Lobe by the parieto-occipital Sulcus.

82
PL Within the PL: Postcentral gyrus (B.A. 1,2,3) Par Operculum (B.A. 43) Superior Par Lobule (B.A. 5,7) Supramarginal gyrus (B.A. 40) Angular gyrus (B.A. 39) Anterior Zone: Includes: Postcentral gyrus and Par Operculum Called: Somatosensory cortex. Processes Somatic sensation and perception. Posterior Zone: Includes: Superior Par Lobule, supramarginal & angular areas. Called: Posterior Parietal Cortex. Processes control of movement with somatic and visual info. Subdivisions of the PL
 Superior Par Lobule (B.A. 5,7) Supramarginal gyrus (B.A. 40) Angular gyrus (B.A. 39) Anterior Zone: Includes: Postcentral gyrus and Par Operculum Called: Somatosensory cortex. Processes Somatic sensation and perception. Posterior Zone: Includes: Superior Par Lobule, supramarginal & angular areas. Called: Posterior Parietal Cortex. Processes control of movement with somatic and visual info. Subdivisions of the PL.")
83
PL von Economo’s maps 3 PP areas: PE, PF, PG Connections 1. The somatosensory cortex projects to PE, primary motor cortex, Supplementary and premotor areas. For tactile recognition, sensory info about limb position in the control of movement. S1 PE M1 SupM PreM

84
PL Connections cont… 2. PE output to M1 to guide movement with tactile information, input from S1 (1,2,3). 3. PF output to M1 to guide movement with tactile and visual info input from S1 through PE. 4. PG output to FL. Main dorsal stream, vision for action control of spatially guided behavior. Input from visual, somesthetic, proprioceptive, auditory, vestibular, oculomotor and cingulate.
. 3. PF output to M1 to guide movement with tactile and visual info input from S1 through PE. 4. PG output to FL. Main dorsal stream, vision for action control of spatially guided behavior. Input from visual, somesthetic, proprioceptive, auditory, vestibular, oculomotor and cingulate..")
85
PL Connections cont… 5. PG output to paralimbic for memory of movements 6. PG & PF output to PFC for STM of visual guided movements. 7. PG output to temporal for processing the shape of objects So, the APC processes somatic sensation and perception and the PPC integrates sensory input from the somatic and visual regions for the control of movement.

86
PL Theory of P.L Function There must be a spatial (internal) representation of things. There is a map or several maps that: Make movements to different objects Discriminate similar objects Make movements relative to body position Order the movements Attend to some objects and ignore others Other aspects of PL function: 1.Arithmetic: Math has quasi-spatial nature, you have to manipulate numbers in space. Left tempo-parietal. 2.Language: Also quasi-spatial demands: “tap” “pat” same letters different spatial organization 3.Understanding sequences of movement

87
PL Somatosensory symptoms (anterior zone, areas 1,2,3,43) 1.Somatosensory thresholds: 2. Perceptual Disorders 3.Blind touch 4.Somatosensory agnosias: 2. Simultaneous Extinction: objects can only be perceived if presented one at a time R>L

88
PL Neglect follows a RPPLx because the integration of the spatial properties of stimuli becomes disturbed. Although stimuli are perceived, their location is uncertain to the CNS= ignore it. Posterior Parietal Symptoms (PE, PF, PG) 1.Balint’s syndrome 2.Contralateral neglect 3. Object recognition: 4. Gerstmann syndrome 5. Language deficits 7. Recall deficits 8. Acopia 9. Spatial Attention 10. Spatial Cognition 11. Attentional shift for action 12. Mental imaging 6. Apraxia: a.Ideomotor b. Constructional
 1.Balint’s syndrome 2.Contralateral neglect 3. Object recognition: 4. Gerstmann syndrome 5. Language deficits 7. Recall deficits 8. Acopia 9. Spatial Attention 10. Spatial Cognition 11. Attentional shift for action 12. Mental imaging 6. Apraxia: a.Ideomotor b. Constructional.")
89
PL Neuropsychological Assessment

91
Maze learning Edward Tolman’s ideas of cognitive maps: an internal representation of the spatial attributes of the maze. Cognitive map could be used to solve current and novel spatial problems What types of experimental paradigms are used to study mechanisms underlying spatial learning/maze learning? 1. Radial arm maze 2. Water maze 3. Circular platform maze

92
Hippocampus and working memory Radial arm maze Disrupted by hippocampal lesion.

93
The radial arm maze: Used to test both working and reference memory Working memory: within a trial Reference memory: across trials Tests the rats ability to optimize it’s search for food

94
Experimental evidence for different spatial learning strategies: Experiments done by Olsen and colleagues: 3 different strategies: 1) remember locations based on room landmarks 2) rule based strategy: choose adjacent arms 3) mark visited arms with a scent Experiment: rotate arms of the maze after the rat has visited 3 arms. 1) result: rat avoids the spatial locations of the 3 previously visited arms Interpretation: the result supports strategy #1, but not #2 or #3
 result: rat avoids the spatial locations of the 3 previously visited arms Interpretation: the result supports strategy #1, but not #2 or #3.")
95
The Morris Water Maze: a spatial learning task Rat learns to locate the position of a submerged platform by learning it’s position with respect to other landmarks. Rat must encode the spatial relationships between the platform and landmarks. Cued learning: rat associates the position of the platform with escape from the water. The platform can be moved and the rat locates it easily.

96
Experimental evidence supporting spatial learning: 1.Rats trained to locate position of submerged platform 2.Platform removed and rats observed for length of time spent swimming in each of 4 quadrants 3. Trained rats spent most of time swimming in quadrant where the platform was located.

97
Spatial learning with the circular platform maze A task very similar to the Morris Water Maze: the rat must find the location of the hole that leads to a tunnel, allowing it to escape from the platform.

98
12.6 Hippocampal damage impairs spatial learning (A) A rat with a hippocampal lesion shows marked perseveration in a radial arm maze. Compare with the normal rat in Figure 12.1. (8) Lesions of the hippocampus or related structures impair spatial learning (black bars) while leaving cued learning (colored bars) intact. After Olton 1977. Effects of hippocampal lesions on spatial learning: 1. Lesions to several parts of the hippocampus caused errors in spatial learning, including perseveration: visiting the same arm many times. 2. Lesions did not affect cued learning.
 Lesions of the hippocampus or related structures impair spatial learning (black bars) while leaving cued learning (colored bars) intact. After Olton Effects of hippocampal lesions on spatial learning: 1. Lesions to several parts of the hippocampus caused errors in spatial learning, including perseveration: visiting the same arm many times. 2. Lesions did not affect cued learning..")
99
Hippocampal lesions affect spatial learning in the Morris Water maze. Lesions to the cortex, or sham lesions have no effect. Lesions do not affect cued learning.

100
General principles resulting from lesion studies: Barnes compared 3 types of studies: 1. Cued learning vs spatial learning 2. Effects of lesions either before or after training 3. Tasks affecting either working or reference memory General features: 1. If the lesion preceded training, acquisition of both working and reference memory were impaired, cued learning was not impaired. Therefore the lesion specifically affected spatial learning, not working or reference memory 2. If the lesion takes place after training, it has much less effect as the time between the training and lesion increases. This suggests that the hippocampus is necessary for acquisition and storage of short term, but not longer term memories.

101
Cells that code for space: hippocampal place cells Hippocampal place cells: discovered by John O’Keefe 1. Firing pattern of the cell increases when animal moves to specific locations within an area. 2. Firing field of the cell: spatial area within which the place cell is active. Nadel and O’Keefe: proposed the hypothesis that the combined activity of cells within the hippocampus creates a cognitive map of the animal’s environment. This proposal launched many investigations by many laboratories to describe and understand this phenomenon.

102
Firing pattern of a place cell as the animal navigates in the environment.

103
What factors control the spatial preference of a place cell? 1. Different cells encode different spatial regions. 2. The size and shape of a place field can differ. 3. A place field develops over time, but remains quite constant as long as the environment does not change. 4. Visual cues are important for place cell selectivity. If visual cues are rotated, place field will rotate as well. 5. If all external cues are removed, the place field remains intact.

104
Firing patterns of 4 different place cells within an arena

105
What internal cues are used to establish and maintain a place field in the absence of external cues? Experiments by Patricia Sharp suggest two factors: 1. Vestibular inputs and visual system inputs Animals were restrained and the floor and walls were moved with respect to the animal’s body. 1. Firing patterns of the cells were altered when either sets of cues were altered. Place cells can switch their fields under different circumstances. 1. Some can be switched by turning the lights on and off. 2. Suggests that place cell fields can be context dependent, fields are flexible and can be altered by both internal and external cues.

106
Role of visual cues: place fields in the dark Experimental evidence: 1. A place field established in the light will remain intact when the lights are turned off as long as the animal remains in the chamber. 2. If the animal is removed from the chamber and reintroduced in the dark, it develops a whole new place field. 3. Another twist on the same experiment: a place field is established in the light, the animal is removed and reintroduced in the dark, remapping the place field. The lights are turned on… which place field does the cell adopt? 4. In most cases the cell adopts the most recently established place field, the one established in the dark.

107
Place cells and memory Experimental evidence: experiments by O’Keefe and Speakman Paradigm: 1. Rats were trained to locate a goal arm in a four arm maze using visual cues. 2. Rats were then trained to locate the arm after a brief exposure to the cues, but cues were removed while rats were in the maze; ie they had to remember the location of the cues. 3.With cues present, place cells behaved as expected. 4. With cues absent, the cells fired when the animal made both correct and incorrect choices. Why is this???

108
Place cells can encode additional aspects of spatial learning Eichenbaum’s experiment: 1. Rats trained to alternate right/left turns in a maze to receive a reward. 2. Place cells that had the same place field showed different firing patterns based on whether the next turn was right or left. 3. These place fields encoded both a location on the track and the direction of the next turn. 4. Other cells had more traditional place fields.

109
Spatial dreaming 1. Experiments by Wilson and McNaughton suggest that the firing patterns of hippocampal place cells create an ensemble code that predicts the movements of the animal through its environment. 2. They made recordings of up to 150 cells at a time while an animal was exploring a new environment. Over time, an ensemble code developed. If the animal was placed in a new environment, it developed a new ensemble code for the new environment, but the old one did not dissapear. 3. Dreaming and consolidation of memories: Wilson and McNaughton recorded from animals while they were sleeping, both before and after they explored a new environment. 4. Cells that fired together in response to spatial location while the animal was awake also fired together while the animal was asleep, but only after the establishment of the ensemble code. Thus re-living the days events in dreams may help to consolidate memories.

110
Head direction cells: 1. A second class of hippocampal neurons that encode the direction the head is facing, irrespective of where the animal is in the environment. 2. Cells are located in the postsubiculum. 3. Cell properties are influenced by both external and internal cues, but do not remap the environment. 4. Cells continue to fire when external cues are removed

111
Two types of head direction cells with different properties: PSC cells (postsubicular cortex cells) and ADN cells (anterior dorsal nucleus of the thalamus). 1. PSC cells fire when the head is facing a certain direction regardless of how it got there. 2. ADN cells fire when the head will be facing a direction in the future. 3. Directional tuning peak of the ADN cells shifts as a function of the angular movement of the head.

112
A model for how ADN cells anticipate the direction of head motion.

113
Two types of cells play different roles in encoding head direction. PSC cells encode present head direction. ADN cells encode future head direction. These cells combine information about current head direction and angular movement of the head to predict future head direction. The two cell types act together to compute head direction by integrating angular head motion over time.

114
Long term potentiation (LTP): a cellular mechanism for short term memory in the hippocampus.
: a cellular mechanism for short term memory in the hippocampus.")
115
NMDA receptors and LTP in hippocampal pyramidal cells

116
Does LTP play a role in spatial learning? Injection of AP5 prior to training blocks spatial learning in the water maze.

117
Forgetting is associated with a decay in hippocampal LTP in both old and young rats.

118
Using knock-out mice to test the role of LTP and NMDA receptors in spatial learning. Summary of experimental evidence: CaMKII knockout mice: 1. Show normal LTP in response to high frequency stimulation, but not to lower frequency ranges. Lower frequencies are characteristic of inputs when the animal is exploring its environment. 2.Place cells: fewer place cells were found and those were weaker and less focused on specific regions. Place fields tended to decompose and drift over time. 3. Spatial learning as assessed with the circular platform maze. Knockouts performed less well. They were capable of using a random search strategy, to a serial search, but could not do a spatial search: Ie. progress directly to the hole.

119
CaMKII knockout mice show a specific deficit in spatial but not cued learning.

120
NMDA receptor knock-out mice Tonegawa and colleagues developed a transgenic mouse strain with a gene deletion that codes for a subunit of the NMDA receptor. 1. LTP and other forms of plasticity are impaired in these mice. 2. Place cells: lacked spatial specificity and there was a marked deficit in coordinated firing patterns of cells that had similar place fields 3. Spatial learning: knockout mice showed clear deficits in spatial learning but were capable of non-spatial learning. These animals took longer to learn non-spatial tasks.

121
LTP and spatial learning in NMDA receptor knockout mice

122
The DNMS (Delayed non-match to sample) task Working memory Delay: Seconds to 10 min
 task Working memory Delay: Seconds to 10 min")
123
Medial temporal (contains hippocampus) lesions and DNMS performance (working memory)
 lesions and DNMS performance (working memory)")
124
Components of the diencephalon involved in memory - Fornix Mammilary body in the hypothalamus Anterior nucleus in the thalamus Cingulate cortex - Lesion in the left dorsomedial thalamus severe retro and antero amnesia

125
Hippocampus and working memory Radial arm maze Disrupted by hippocampal lesion.

126
Place cells in the hippocampus 10 min

127
Are place cells related to where the animal think it is? NW SE No visual cues (i.e. light off)?
")
128
Place cells in the human brain? Figure 23.16. Activity in human brain related to spatial navigation Maguire et al. Knowing where and getting there: a human navigation network. Science. 1998 May 8;280(5365):921-4. PET studies Difference between the navigation and directed navigation= hippocampus
: PET studies Difference between the navigation and directed navigation= hippocampus.")
129
Caudate: may reflect movement planning Hippocampus: place cells? Similar hippocampal activity from “imagination” of navigation in experienced taxi drivers Reasons for the asymmetry is not clear

130
Spatial map vs. Relational memory Spatial map: hippocampal place fields organized as the locations in space, much like the retinotopy in the visual cortex. Relational memory: “ball A is below cone B” would be one memory.

131
The neocortex and working memory

133
Prefrontal cortex and working memory: The Wisconsin card-sorting test (should figure out the current sorting category!) See Figure 23.23 Patients with prefrontal lesions have difficulty on this task!! Prefrontal cortex involved in the working memory

134
Clinical Tests of Topographic Knowledge A.Route description B.Sketch-map production C.Problems with these traditional tests D.Tests of stimulus-specific deficits in visual memory E.Other tests from cognitive psychology and related fields F.Maze-learning tasks (e.g., Milner’s (1965) stylus- maze task) Problems with maze-learning tasks Problems with maze-learning tasks G.Virtual environment tasks Advantages and disadvantages Advantages and disadvantages
 stylus- maze task) Problems with maze-learning tasks Problems with maze-learning tasks G.Virtual environment tasks Advantages and disadvantages Advantages and disadvantages")
135
A Taxonomy of TD

136
Category 1: Egocentric Disorientation Here, topographic disorientation is secondary to visual disorientation Here, topographic disorientation is secondary to visual disorientation These patients cannot localize seen objects in space These patients cannot localize seen objects in space Impaired on Impaired on a wide variety of visual-spatial tasks a wide variety of visual-spatial tasks wayfinding tasks in both previously familiar and novel environments wayfinding tasks in both previously familiar and novel environments tests of route description and sketch-map production tests of route description and sketch-map production Intact Intact visual-object recognition visual-object recognition Lesion site: Bilateral or unilateral (right) posterior parietal lobe Lesion site: Bilateral or unilateral (right) posterior parietal lobe
 posterior parietal lobe Lesion site: Bilateral or unilateral (right) posterior parietal lobe")
137
A more specific (and quite rare) impairment in spatial representation, involving selective damage to allocentric spatial representations A more specific (and quite rare) impairment in spatial representation, involving selective damage to allocentric spatial representations Patients have an inability to perceive and remember the spatial relations among landmarks in the environment, and their orientation relative to those landmarks Patients have an inability to perceive and remember the spatial relations among landmarks in the environment, and their orientation relative to those landmarks Category 2: Heading Disorientation
 impairment in spatial representation, involving selective damage to allocentric spatial representations A more specific (and quite rare) impairment in spatial representation, involving selective damage to allocentric spatial representations Patients have an inability to perceive and remember the spatial relations among landmarks in the environment, and their orientation relative to those landmarks Patients have an inability to perceive and remember the spatial relations among landmarks in the environment, and their orientation relative to those landmarks Category 2: Heading Disorientation")
138
Intact Intact ability to recognize landmarks ability to recognize landmarks representations of egocentric space representations of egocentric space Impaired Impaired recall of previously learned topographical knowledge recall of previously learned topographical knowledge the acquisition of novel topographic information the acquisition of novel topographic information ability to describe routes or draw sketch maps ability to describe routes or draw sketch maps Lesion site: Posterior cingulate gyrus (usually right) Lesion site: Posterior cingulate gyrus (usually right) Category 2: Heading Disorientation
 Lesion site: Posterior cingulate gyrus (usually right) Category 2: Heading Disorientation")
139
An impairment of visual recognition that is selective or disproportionate for objects in the environment that usually serve as landmarks (e.g., buildings) An impairment of visual recognition that is selective or disproportionate for objects in the environment that usually serve as landmarks (e.g., buildings) Intact Intact object and spatial perception object and spatial perception ability to describe routes, layouts, and maps ability to describe routes, layouts, and maps Ability to distinguish pictures of faces from one another Ability to distinguish pictures of faces from one another spatial learning spatial learning Category 3: Landmark Agnosia
 An impairment of visual recognition that is selective or disproportionate for objects in the environment that usually serve as landmarks (e.g., buildings) Intact Intact object and spatial perception object and spatial perception ability to describe routes, layouts, and maps ability to describe routes, layouts, and maps Ability to distinguish pictures of faces from one another Ability to distinguish pictures of faces from one another spatial learning spatial learning Category 3: Landmark Agnosia")
140
A interesting feature: Compensatory strategies A interesting feature: Compensatory strategies Lesion site: Bilateral or unilateral (right) medial aspect of the occipital lobe, including the fusiform and lingual gyri and sometimes the parahippocampal gyrus Lesion site: Bilateral or unilateral (right) medial aspect of the occipital lobe, including the fusiform and lingual gyri and sometimes the parahippocampal gyrus Category 3: Landmark Agnosia
 medial aspect of the occipital lobe, including the fusiform and lingual gyri and sometimes the parahippocampal gyrus Lesion site: Bilateral or unilateral (right) medial aspect of the occipital lobe, including the fusiform and lingual gyri and sometimes the parahippocampal gyrus Category 3: Landmark Agnosia")
141
A topographic impairment that encompasses both spatial and landmark knowledge, and is selective for the acquisition of this knowledge A topographic impairment that encompasses both spatial and landmark knowledge, and is selective for the acquisition of this knowledge These patients show normal topographic abilities for environments that were familiar before their brain injury These patients show normal topographic abilities for environments that were familiar before their brain injury They cannot learn new environments, however They cannot learn new environments, however Category 4: Anterograde Disorientation

142
Impairment perhaps based on a loss of recent visual memory? Impairment perhaps based on a loss of recent visual memory? Lesion site: Parahippocampal gyrus (usually right) Lesion site: Parahippocampal gyrus (usually right) The importance of convergent data (neuropsychological, neurophysiological, and imaging; animals and humans) The importance of convergent data (neuropsychological, neurophysiological, and imaging; animals and humans) Category 4: Anterograde Disorientation
 Lesion site: Parahippocampal gyrus (usually right) The importance of convergent data (neuropsychological, neurophysiological, and imaging; animals and humans) The importance of convergent data (neuropsychological, neurophysiological, and imaging; animals and humans) Category 4: Anterograde Disorientation.")
143
Cognitive map in the Hippocampus ► The cognitive map is represented by a population of place cells ► The cognitive map is represented by a population of place cells ► (O’Keefe and Nadel, 1978) Question: How is it used for navigation ?
 Question: How is it used for navigation")
144
How is it used for navigation? ► To know where I am ► To know where's the next to go Synaptic modification in hippocampal neurons (CA3 recurrent connections) is necessary for the retrieval complete spatial memory in case of a lack of cues, and rapid encoding of novel behavioral sequence. (Nakazawa et al., 2002; 2003)
 is necessary for the retrieval complete spatial memory in case of a lack of cues, and rapid encoding of novel behavioral sequence. (Nakazawa et al., 2002; 2003).")
145
Transformation between different coordinates ► To transform allocentric information into egocentric information

146
Problem: How does the hippocampus represent a place with multiple destinations? Memory-Guided Behavior Spatial Alternation Task

147
Memory-Guided Behavior Disambiguation Transformation Disambiguation Transformation Temporal Coding? Temporal Coding?

148
Theta Phase Precession Encoding Immediate encoding of temporal sequence (Yamaguchi, 2003) Cognitive map formation through sequence encoding (Wagatsuma and Yamaguchi, 2004) Immediate encoding of temporal sequence (Yamaguchi, 2003) Cognitive map formation through sequence encoding (Wagatsuma and Yamaguchi, 2004) Retrieval (O’Keefe and Recce, 1993; Skaggs et al., 1996)
 Cognitive map formation through sequence encoding (Wagatsuma and Yamaguchi, 2004) Immediate encoding of temporal sequence (Yamaguchi, 2003) Cognitive map formation through sequence encoding (Wagatsuma and Yamaguchi, 2004) Retrieval (O’Keefe and Recce, 1993; Skaggs et al., 1996)")
149
Working Hypothesis Theta phase coding concurrently represent current sensory input, memory retrieval and motion selection in phase of every theta cycle. A certain period of sensory input compressed into the theta cycle gives a context, enabling context-dependent memory retrieval and motion selection.

150
Neural Network Model i) Units in every layer are described by a non-linear oscillator. ii) Theta phase precession is generated in EC by using oscillator synchronization. iii) Associative connections, HP-HP and HP-SUB, are modified by using asymmetric Hebb rule. i) Units in every layer are described by a non-linear oscillator. ii) Theta phase precession is generated in EC by using oscillator synchronization. iii) Associative connections, HP-HP and HP-SUB, are modified by using asymmetric Hebb rule. Sensory input Place ( 2 -dimensional) Place ( 2 -dimensional) Head-direction ( 1 -dimensional) Head-direction ( 1 -dimensional) Place x Head-direction ( 3 -dimensional) Place x Head-direction ( 3 -dimensional) Motion selection ( Left or Right ) Motion selection ( Left or Right )
 Theta phase precession is generated in EC by using oscillator synchronization. iii) Associative connections, HP-HP and HP-SUB, are modified by using asymmetric Hebb rule. i) Units in every layer are described by a non-linear oscillator. ii) Theta phase precession is generated in EC by using oscillator synchronization. iii) Associative connections, HP-HP and HP-SUB, are modified by using asymmetric Hebb rule. Sensory input Place ( 2 -dimensional) Place ( 2 -dimensional) Head-direction ( 1 -dimensional) Head-direction ( 1 -dimensional) Place x Head-direction ( 3 -dimensional) Place x Head-direction ( 3 -dimensional) Motion selection ( Left or Right ) Motion selection ( Left or Right ).")
151
Demonstration: Theta Phase Precession Computer Simulations Activities of HP units in rearranged plane Computer Simulations Activities of HP units in rearranged plane (Observed by Samsonovich and McNaughton,1997) (Observed by Samsonovich and McNaughton,1997) Experimental Data Activities of HP units in rearranged plane Experimental Data Activities of HP units in rearranged plane Oscillation of HP unit: Oscillation of HP unit:
 (Observed by Samsonovich and McNaughton,1997) Experimental Data Activities of HP units in rearranged plane Experimental Data Activities of HP units in rearranged plane Oscillation of HP unit: Oscillation of HP unit:")
152
Computer Experiment: Memory-Guided Behavior (1)
")
153
What About the Hippocampus?

154
A.Importance of this structure for navigation in rodents Place cells in the rat hippocampus Place cells in the rat hippocampus The hippocampus as a cognitive map The hippocampus as a cognitive map The Morris water maze (MWM) The Morris water maze (MWM) Rats with hippocampal lesions show significant deficits on an MWM place learning task Rats with hippocampal lesions show significant deficits on an MWM place learning task
 The Morris water maze (MWM) Rats with hippocampal lesions show significant deficits on an MWM place learning task Rats with hippocampal lesions show significant deficits on an MWM place learning task")
156
What About the Hippocampus? B.Difficulty translating these animal findings into humans. It may be that: either left or right hippocampus can support representations of topographic space in humans either left or right hippocampus can support representations of topographic space in humans in humans, wayfinding in previously learned environments can be accomplished without hippocampal involvement in humans, wayfinding in previously learned environments can be accomplished without hippocampal involvement the human hippocampus is not specialized for place learning, but for many kinds of episodic/declarative knowledge the human hippocampus is not specialized for place learning, but for many kinds of episodic/declarative knowledge

157
The Computer-Generated Arena A human analogue of the MWM A human analogue of the MWM A ‘non-immersive’ desktop virtual environment A ‘non-immersive’ desktop virtual environment Participants attempt to navigate toward a specific designated place Participants attempt to navigate toward a specific designated place Proximal and distal cues signaling spatial location can be systematically varied Proximal and distal cues signaling spatial location can be systematically varied

159
Travel ► the motor component of navigation ► movement between 2 locations, ► setting the position (and orientation) of the user’s viewpoint ► the most basic and common VE interaction technique used in almost any large-scale VE
 of the user’s viewpoint ► the most basic and common VE interaction technique used in almost any large-scale VE")
160
Travel tasks ► Exploration travel which has no specific target build knowledge of environment

161
Travel tasks (cont.) ► Search naive: travel to find a target whose position is not known primed: travel to a target whose position is known build layout knowledge move to task location
 ► Search naive: travel to find a target whose position is not known primed: travel to a target whose position is known build layout knowledge move to task location")
162
Travel tasks (cont.) ► Maneuvering travel to position the viewpoint for a task short, precise movements
 ► Maneuvering travel to position the viewpoint for a task short, precise movements")
163
Steering metaphor ► continuous specification of direction of motion gaze-directed Pointing (the “fly” gesture) physical device (steering wheel, flight stick)
 physical device (steering wheel, flight stick)")
164
Target-based metaphor ► discrete specification of the goal location point at object choose from list enter coordinates

165
Route-planning metaphor ► one-time specification of path place markers in world move icon on map

166
Manipulation metaphor ► manual manipulation of viewpoint “camera in hand” fixed object manipulation

167
“Natural” travel metaphors ► Walking techniques ► Treadmills ► Bicycles ► Other physical motion VMC / Magic carpet Disney’s river raft ride Simulation of flying

168
Technique classification Travel Start to move Stop moving Indicate position Indicate orientation position velocity acceleration Target specification Route specification Continuous specification

169
Alternate Technique classification Travel Direction/Target Selection Velocity/Accel. Selection Conditions of Input gaze-directed pointing physical props gesture slow in, slow out physical props start/stop buttons automatic start/stop constant movement

170
Bowman -- Evaluation results ► steering techniques have similar performance on absolute motion tasks ► non-head-coupled steering better for relative motion

171
Evaluation results – 2 ► “teleportation” can lead to significant disorientation ► env. complexity affects info. gathering ► travel IT and user’s strategies affect spatial orientation

172
Evaluation results – 3 ► manipulation-based techniques efficient for relative motion ► manipulation-based techniques that do not require an object are efficient for search, but tiring

173
Evaluation results – 4 ► Steering techniques best for naïve and primed search ► Map-based techniques not effective in unfamiliar environments, or when any precision is required

174
Myths ► There is one optimal travel technique for VEs. ► A “natural” technique will always be better than another technique. ► Desktop 3D, workbench, and CAVE applications should use the same travel ITs as HMD-based VEs.

175
Design guidelines ► Make simple travel tasks simple (target- based techniques for motion to an object, steering techniques for search). ► Provide multiple travel techniques to support different travel tasks in the same application.

176
More design guidelines ► Use transitional motions if overall environment context is important. ► Train users in sophisticated strategies to help them acquire survey knowledge. ► Consider integrated (“cross-task”) ITs if travel is used in the context of another task (e.g. manipulation).
 ITs if travel is used in the context of another task (e.g. manipulation)..")
177
Wayfinding ► Cognitive process of defining a path through an environment, using and acquiring spatial knowledge, helped by (artificial) cues ► 6DOF makes wayfinding hard: human beings have different abilities to orient themselves in an environment
 cues ► 6DOF makes wayfinding hard: human beings have different abilities to orient themselves in an environment")
178
Wayfinding ► Observing wayfinding as a decision making process

179
Wayfinding tasks ► general, explorative search Search without target ► naive search target position unknown ► primed search target seen before (known) ► specified trajectory movement Predefined path
 ► specified trajectory movement Predefined path")
180
Cognitive Map ► During wayfinding, a person makes use of three kinds of knowledge to built up a cognitive map of the environment: Landmark knowledge Procedural knowledge Survey knowledge

181
Reference frames ► Egocentric reference frame: position, orientation, movement of object with respect to position and orientation of the: eyes head body

182
Reference frames ► Exocentric reference frame: position, orientation and movement are defined in coordinates external to body object shape object orientation object motion

183
Travel technique effects ► Steering technique with good strategy helps spatial orientation ► A good travel technique will integrate aids to wayfinding ► Jumping between points disturbs spatial orientation

184
Support of spatial knowledge acquisition ► Allow a wide field of view ► Provide motion cues for judging depth and direction of movement ► Audio could enhance visual spatial perception ► Support sense of presence: it could strengthen the construction of a cognitive map

185
Support of spatial knowledge acquisition ► Design legible environments - allow the user to easily see the spatial organisation of an environment, enabling the establishment of a cognitive map. Divide a large-scale environment into parts with a distinct character

186
Support of spatial knowledge acquisition Create a simple spatial organisation in which the relations between the parts are clear Support the matching process between the egocentric and exocentric frames of reference by (visual) cues, including directional cues
 cues, including directional cues")
187
Support of spatial knowledge acquisition ► Use real-world wayfinding principles to build up your environment ► natural environment principles ► urban design principles [Lynch] ► architectural design principles ► artificial cues
![Support of spatial knowledge acquisition ► Use real-world wayfinding principles to build up your environment ► natural environment principles ► urban design principles [Lynch] ► architectural design principles ► artificial cues](http://images.slideplayer.com/21/6277740/slides/slide_187.jpg "Support of spatial knowledge acquisition ► Use real-world wayfinding principles to build up your environment ► natural environment principles ► urban design principles [Lynch] ► architectural design principles ► artificial cues")
188
Examples of wayfinding aids

189
Map usage guidelines ► Provide you are here marker ► Provide grid ► Choose either north-up or forward-up map, depending on task ► Example: World-in- Miniature

Similar presentations













 – post central gyrus parietal lobe.>")
 CNS = Brain + spinal cord Surface anatomy includes.>")











