Download presentation
Presentation is loading. Please wait.

2
Problem/Need Statement System Requirements System Analysis Functional Decomposition Concept Renderings Market Survey Risks

3
Problem – Currently there is a robotic frame with two mobile robotic arms, but a static shell for the head. Need – The head needs to be capable of showing human-like facial emotions and movements. › Smile, frown, frustration, etc; › Tilt, roll, and pan the head.

4
The head shall look clean and nonthreatening, while retaining human-like attributes. The head shall pitch, roll and yaw within a 90º, 90º, 90º arc of motion within a user specified duration. Movement of the head shall be smooth and well transitioned. The mouth and each eyebrow shall be handled by a single servo, with a 180º arc of motion within a user specified duration. Motors shall be quiet and not distracting.

5
Microphones shall be used to listen for human speech and object interaction noise within three meters of the robot while distinguishing between ambient noise and human voice. A camera shall be implemented within the head or body to provide/process visual feedback. The microcontroller board shall be connected to a PC via serial or USB. Servo wiring shall be twisted pair (to maintain low noise emission). API shall be done within C/C++. Interface will be done in C#.
. API shall be done within C/C++. Interface will be done in C#..")
6
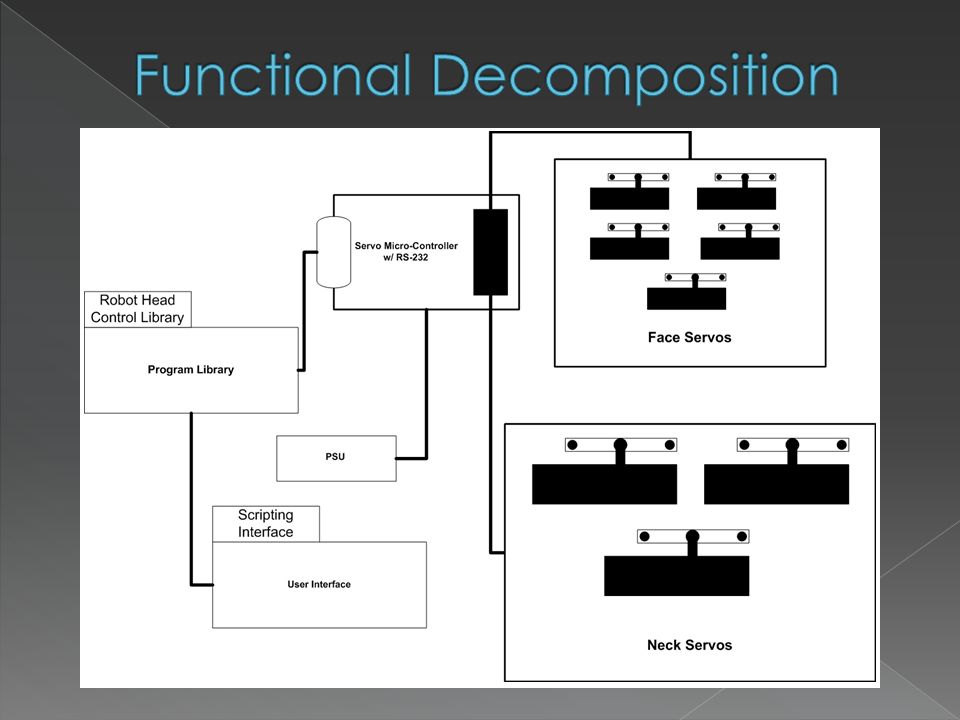
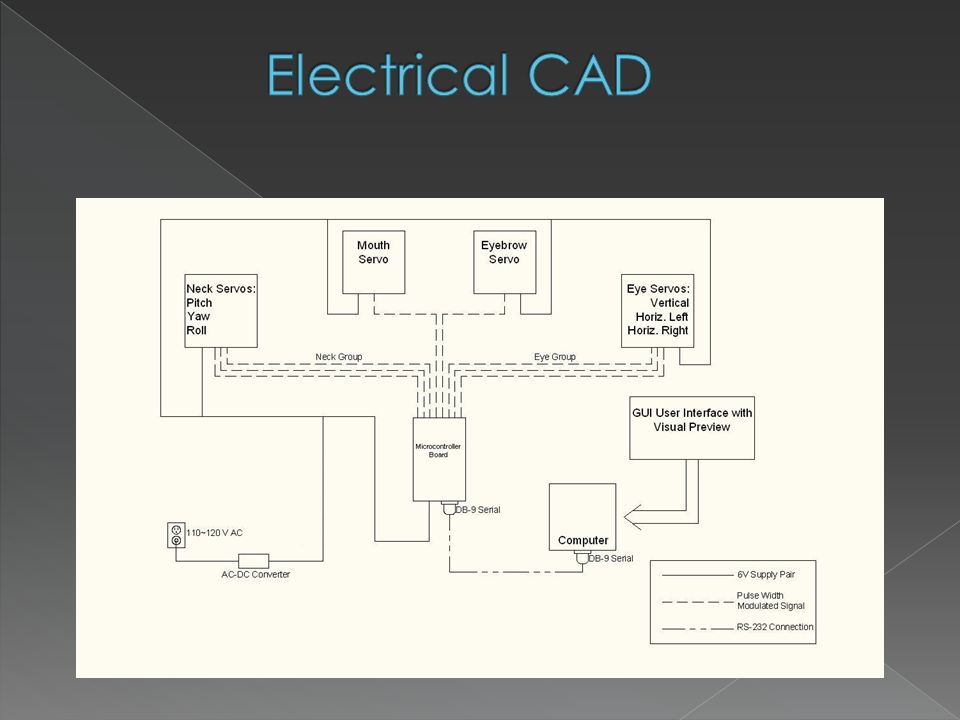
A single RS-232 Servo Controller will handle all pulse width control signals to all eight servos. A power supply will have enough power for all servos and controller Programming will provide user communication to controller.

8
Provided by Alex Stoytchev

10
There are a very limited amount of projects/products similar to ours. MIT does have a comparable project that is focusing on environmental interaction, and is replete with eyebrows, eyes, mouth and neck.

12
Technical: › Servo controller/motor malfunction. › Difficulties integrating serial interface. Financial: › Parts may exceed small budget. › Loss/denied funding for project/parts.

13
Schedule: › Shipping delays › Other course work delays project tasks Customer Acceptance › Not pleased with result/design and documentation › Solution might exceed budget

14
Hardware specification Software specification User interface specification

15
Three servos 0-180º < 1 second Three degrees of freedom Easily Fits inside space provide on the chassis Supports up to 4kg Price: $60.00

16
Control System: +Pulse Width Control 1500usec Neutral Required Pulse: 3-5 Volt Peak to Peak Square Wave Operating Voltage: 4.8-6.0 Volts Operating Temperature Range: -20 to +60 Degree C Operating Speed (4.8V): 0.24sec/60° at no load Operating Speed (6.0V): 0.20sec/60° at no load Stall Torque (4.8V): 106.93 oz/in. (7.7kg.cm) Stall Torque (6.0V): 133.31 oz/in. (9.6kg.cm) Operating Angle: 45° one side pulse traveling 400usec 360 Modifiable: Yes Direction: CW/Pulse Traveling 1500 to 1900usec Current Drain (4.8V): 8.8mA/idle and 350mA no load Current Drain (6.0V): 9.1mA/idle and 450mA no load Motor Type: 3 Pole Ferrite Potentiometer Drive: Indirect Drive Bearing Type: Dual Ball Bearing Gear Type: 3 Metal Gears and 1 Resin Metal Gear Connector Wire Length: 11.81" (300mm) Dimensions: 40.6 x 19.8 x 37.8mm Weight: 1.94oz. (55.2g) Price: $40.00 each
 Stall Torque (6.0V): oz/in. (9.6kg.cm) Operating Angle: 45° one side pulse traveling 400usec 360 Modifiable: Yes Direction: CW/Pulse Traveling 1500 to 1900usec Current Drain (4.8V): 8.8mA/idle and 350mA no load Current Drain (6.0V): 9.1mA/idle and 450mA no load Motor Type: 3 Pole Ferrite Potentiometer Drive: Indirect Drive Bearing Type: Dual Ball Bearing Gear Type: 3 Metal Gears and 1 Resin Metal Gear Connector Wire Length: (300mm) Dimensions: 40.6 x 19.8 x 37.8mm Weight: 1.94oz. (55.2g) Price: $40.00 each.")
17
Control System: +Pulse Width Control 1520usec Neutral Required Pulse: 3-5 Volt Peak to Peak Square Wave Operating Voltage: 4.8-6.0 Volts Operating Temperature Range: -20 to +60 Degree C Operating Speed (4.8V): 0.10sec/60° at no load Operating Speed (6.0V): 0.09sec/60° at no load Stall Torque (4.8V): 20.8 oz/in. (1.5kg.cm) Stall Torque (6.0V): 23.5 oz/in. (1.7kg.cm) Operating Angle: 45° one side pulse traveling 400usec 360 Modifiable: No Direction: CCW/Pulse Traveling 1520-1900usec Motor Type: 3 Pole Ferrite Potentiometer Drive: Indirect Drive Bearing Type: Top Ball Bearing Gear Type: All Nylon Gears Connector Wire Length: 12” Dimensions: 21.8 x 11 x 19.8mm Weight:.27oz. (7.8g) Price: $14.00 each
 Stall Torque (6.0V): 23.5 oz/in. (1.7kg.cm) Operating Angle: 45° one side pulse traveling 400usec 360 Modifiable: No Direction: CCW/Pulse Traveling usec Motor Type: 3 Pole Ferrite Potentiometer Drive: Indirect Drive Bearing Type: Top Ball Bearing Gear Type: All Nylon Gears Connector Wire Length: 12 Dimensions: 21.8 x 11 x 19.8mm Weight:.27oz. (7.8g) Price: $14.00 each.")
18
Max packet size: 59 bytes Max control rate: 15 instructions / second 74% available bandwidth used worst case 1 to 8 servos per board with 8-bit resolution <1° of servo position precision resolution Servo port can be reconfigured for digital output to drive on/off devices. Interface to PC through RS232 Serial port (2400 to 19200 baud). User definable board ID number (allowing multiple boards to share same serial line). 5-Ch, 8-bit A/D input port for reading 0 - 5 Volts. (Control servo positions via Joystick/Pot) Dimensions: 1.4 in X 1.7 in Servo Connectors: 3 pin J-type connectors. Power supply: 7V-15V Price: $80.00
. User definable board ID number (allowing multiple boards to share same serial line). 5-Ch, 8-bit A/D input port for reading Volts. (Control servo positions via Joystick/Pot) Dimensions: 1.4 in X 1.7 in Servo Connectors: 3 pin J-type connectors. Power supply: 7V-15V Price: $")
19
MIC Type: Gooseneck Element: Back electret condenser Polar Pattern: Cardioid Impedance: 250Ω Frequency: 50 Hz to 18 kHz Sensitivity*: -65 dB +/- 3dB Max SPL @ 1% THD: >130 dB S/N Ratio: >65 dB Phantom Voltage Req: 9V – 52V DC Connector: XLR Male Dimensions: 18-1/4" L x 3/4" Dia. Product Weight: 4 oz. Material: Cooper Finish: Non-glare black finish Price: $80.00 *(0dB=1V/BAR 1,000 Hz indicated by open circuit)
.")
20
Sensor: CMOS VGA sensor technology Resolution: Motion Video: 640 x 480 pixels video Still Image: 1.3 megapixel (1280 x 960 pixels, interpolated) photos Field of View: 55° diagonal field of view Automatic face tracking Digital pan, tilt, and zoom Manual focus Price: Already provided
 photos Field of View: 55° diagonal field of view Automatic face tracking Digital pan, tilt, and zoom Manual focus Price: Already provided")
21
Servos › Function Generator › Oscilloscope › Bench-Top DC Power Supply Microcontroller Board › Oscilloscope › Computer with serial connection › HyperTerminal Communication Software › Bench-Top DC Power Supply Power Supply/Voltage Divider › Bench-Top Multimeter › Bench-Top DC Power Supply

22
Frame (Eye Tray) › Completed frame and servo assembly › Working serial computer communication › Final testing stage Frame (Aesthetic Plate Attachment) › Completed frame and servo assembly › Final testing stage Neck Joints › Completed head with plates attached › Working serial computer communication
 › Completed frame and servo assembly › Working serial computer communication › Final testing stage Frame (Aesthetic Plate Attachment) › Completed frame and servo assembly › Final testing stage Neck Joints › Completed head with plates attached › Working serial computer communication")
23
Theoretical: › Expression-Movement Mechanics (SolidWorks) Physical: › Expression-Movement Mechanics › Aesthetic plate connections
 Physical: › Expression-Movement Mechanics › Aesthetic plate connections")
24
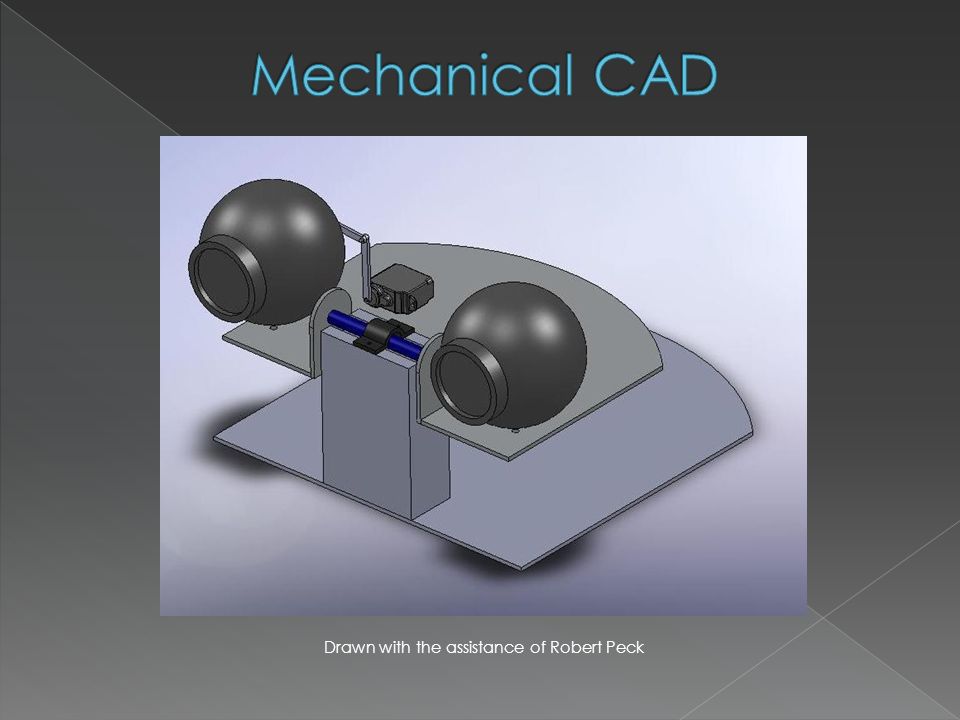
Drawn with the assistance of Robert Peck

27
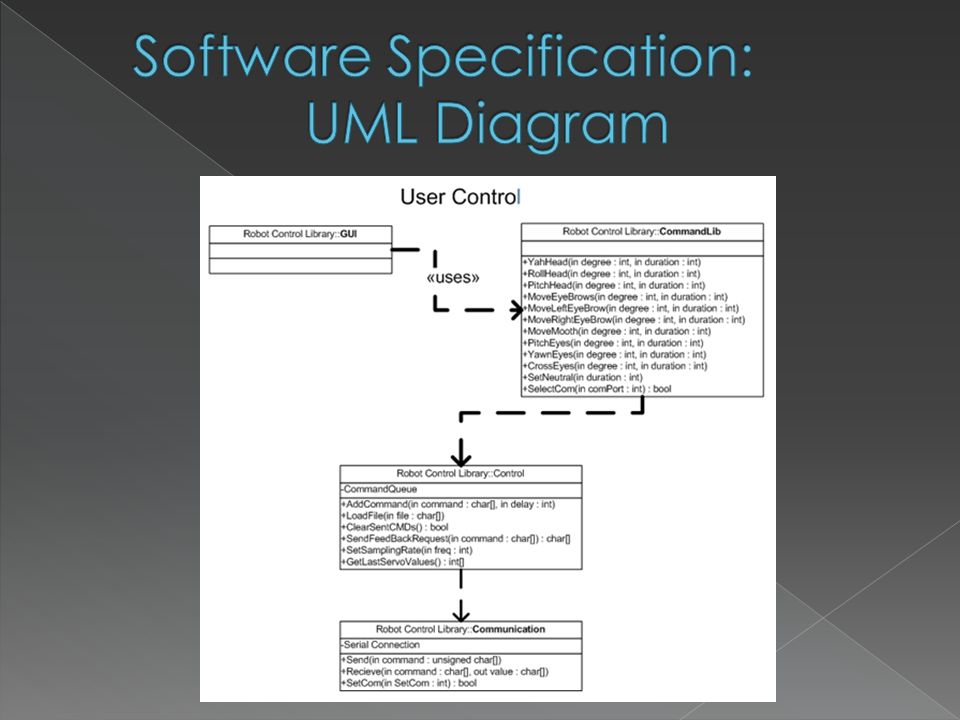
Software tools to allow for interaction with our robotic head › RS-232 Instructions Broad library › Easy to develop scripts › Implementation Written in C › Accommodate robotic arm code

28
Broad functions that allow for full movement control › Each servo is controlled and receives feedback from microcontroller. Descriptive functions › Anticipate future changes › Easy to read and use Command hierarchy › Reduce redundant code › Stable functions › Easy to create new functions.

30
Unit Testing: › Test each software component. › Ensure each component works to design. Software System Testing: › Manual test using HyperTerminal › Ensure system works to design. User Validation › Ensures design overall correctness.

31
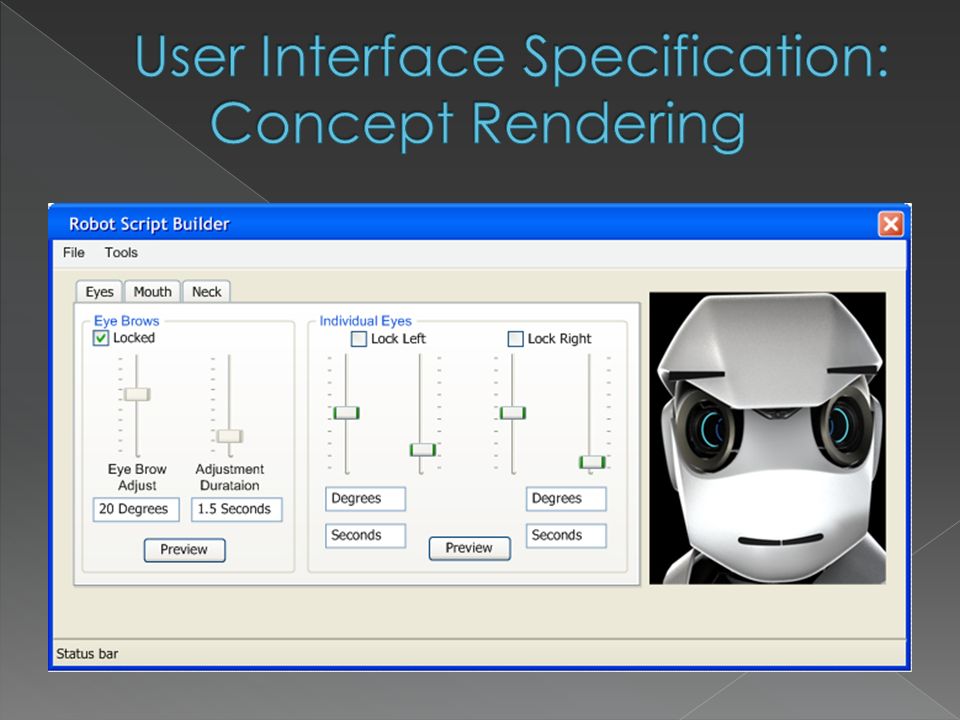
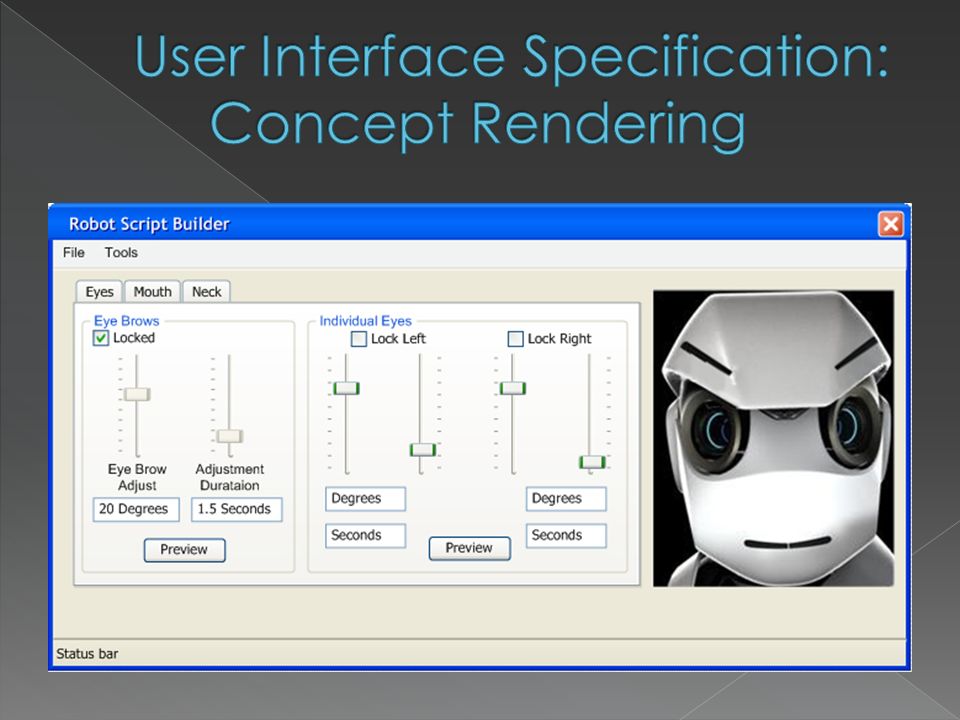
User-directed scripting for robot animations. › Save and open scripts Manually adjust individual facial and neck parts. Easy-to-use tabs for different aspects Adjust hardware related options. Image provided to allow judgment of ending animation (with preview button).
..")
34
To create animations for head To create a clean, easy to understand interface To create a stable interface with: › Proper error reporting › Feedback for the user › Crash acknowledgement

Similar presentations


, Jeremy Jensen (ME), Matthew DeCapua (EE), Eric Walkama (ME), Mike Thomas (EE), Jonathan Cormier (CE), John.>")





 Vikash.>")








 Team Lazer: Son Nguyen Jassim Alshamali Aja ArmstrongMatt Aamold.>")


