Download presentation
Presentation is loading. Please wait.

1
What controls the shape of a real Doppler spectrum?
ERAD Short Course, Sunday 31st August 2014, Garmisch-Partenkirchen, Germany Research Applications of Radar Doppler Spectra What controls the shape of a real Doppler spectrum? Frederic Tridon University of Leicester, Leicester, United-Kingdom and contributions from A. Battaglia, P. Kollias, S. Kneifel, E. Luke and M. Maahn

2
Outline Observed Doppler spectra Trade-offs
How are they produced? Signal processing Estimation - Accuracy Trade-offs Compromises between different parameters Influence on the Doppler spectra Simulation of Doppler spectra Microphysical model Air state model Electromagnetic model Instrument model

3
Observed Doppler spectra
Giangrande et al. (2012)
")
4
Example of measured spectrum (ARM UHF wind profiler)
Traditionally, radar measurements are characterized by the first 3 spectral moments: Reflectivity, which can be related to the weather signal power Mean Doppler velocity, which is essentially the air motion toward or away from the radar Spectrum width, which is a measure of the velocity dispersion, i.e. shear or turbulence within the resolution volume Zeroth moment: reflectivity factor First moment: mean Doppler velocity Second moment: spectrum width The Doppler spectra contain a wealth of information but how can we get them and why don’t we always get them? Z σz2 VDop

5
Pulsed Doppler radars: amplitude and phase sampling
time delay between any transmitted pulse and its echo (range time) sample time (uniform PRT) Pulse 1 (m=0) Pulse 2 (m=1) Pulse 3 (m=2) sample-time range-time time series data from the same range (gate) ts2-ts1: gate spacing Now, consider the signal V(mTs,ts) at a specific ts corresponding to the range r
 sample time. (uniform PRT) Pulse 1 (m=0) Pulse 2 (m=1) Pulse 3 (m=2) sample-time. range-time. time series data from the same range (gate) ts2-ts1: gate spacing. Now, consider the signal V(mTs,ts) at a specific ts corresponding to the range r.")
6
Fluctuations of total signal amplitude and phase
Pulse 1 (m=0) where Dri = vimTs Pulse m with fd=-2vi/l
 where Dri = vimTs. Pulse m. with fd=-2vi/l.")
7
Unambiguous velocity The echo phase ye is sampled at intervals Ts and its change Dye over Ts is a measure of the Doppler frequency. But, it is not possible to determine whether V(t) rotated clockwise or counter clockwise and how many times it circled the origin in the time Ts. a correct Doppler shift could be any of these (where n is a positive or negative integer) The Nyquist (or folding) velocity is defined as All Doppler velocities between ±fN are the principal aliases and the frequencies higher than fN are ambiguous with those between ±fN So, we cannot relate the phase change to one unique Doppler frequency and the unambiguous limits for radial velocities are
 rotated clockwise or counter clockwise and how many times it circled the origin in the time Ts. a correct Doppler shift could be any of these (where n is a positive or negative integer) The Nyquist (or folding) velocity is defined as. All Doppler velocities between ±fN are the principal aliases and the frequencies higher than fN are ambiguous with those between ±fN. So, we cannot relate the phase change to one unique Doppler frequency and the unambiguous limits for radial velocities are.")
8
Fluctuations of total signal amplitude and phase
Pulse 1 (m=1) where Dri = vimTs Pulse m with fd=-2vi/l The different hydrometeors cause individual backscattering (amplitudes) and phase shifts (fall velocity) at the receiver. Because the position of drops changes with time, radar echoes (coming from the sum of the individual returns of drops) fluctuate V(t,r) is a random variable A single measurement from a given region is not enough and it is necessary to observe a volume for a certain amount of time (many milliseconds) to obtain a reasonable average reflectivity In dealing with random signals, the most one can hope to accomplish is to estimate some average statistical parameters. Two useful ones are the mean and autocorrelation
 where Dri = vimTs. Pulse m. with fd=-2vi/l. The different hydrometeors cause individual backscattering (amplitudes) and phase shifts (fall velocity) at the receiver. Because the position of drops changes with time, radar echoes (coming from the sum of the individual returns of drops) fluctuate. V(t,r) is a random variable. A single measurement from a given region is not enough and it is necessary to observe a volume for a certain amount of time (many milliseconds) to obtain a reasonable average reflectivity. In dealing with random signals, the most one can hope to accomplish is to estimate some average statistical parameters. Two useful ones are the mean and autocorrelation.")
9
Signal processing PP processing FFT processing SIGNAL
Autocorrelation: cross-correlation of a signal with itself For a sequence of M+1 uniformly spaced transmitted pulses, the autocorrelation function R̂(Ts) at lag Ts can be estimated as similarity between observations as a function of the time lag between them, mathematical tool for finding repeating patterns such as a periodic signal Power spectrum: Fourier Transform of the autocorrelation function frequency distribution of the signal power Then, the estimate of mean velocity v̂ and spectrum width σ̂v are the power spectrum decomposes the content of the signal of a stochastic process into the different frequencies present in that process, and helps identify periodicities. In our case, it decomposes the energy scattered by hydrometeors according to their velocity with respect to the radar. Precipitation distributed over large regions radar measurements made at a large number of range/time locations FFT: large computation time and large storage covariance calculations traditionally used But through the progress of technology, the Fourier transform is more and more used FFT processing FFT Raw radar data Doppler Spectrum SIGNAL TIME
 at lag Ts can be estimated as. similarity between observations as a function of the time lag between them, mathematical tool for finding repeating patterns such as a periodic signal. Power spectrum: Fourier Transform of the autocorrelation function frequency distribution of the signal power. Then, the estimate of mean velocity v̂ and spectrum width σ̂v are. the power spectrum decomposes the content of the signal of a stochastic process into the different frequencies present in that process, and helps identify periodicities. In our case, it decomposes the energy scattered by hydrometeors according to their velocity with respect to the radar. Precipitation distributed over large regions radar measurements made at a large number of range/time locations. FFT: large computation time and large storage covariance calculations traditionally used. But through the progress of technology, the Fourier transform is more and more used. FFT processing. FFT. Raw radar data. Doppler Spectrum. SIGNAL. TIME.")
10
Uncertainty of Doppler moments (spectral processing)
Only 3 parameters M: number of FFT SNR=S/N: signal to noise ratio svn: normalized spectrum width At high SNR where svn is the normalized spectrum width: and Ti is the time to independence: (Doviak and Zrnic, 1984)
")
11
Uncertainty of Doppler moments (PP vs spectral processing)
The Fourier derived means have variances that increase much more slowly than the autocovariance method Another advantage of the spectral processing is the ease to identify and eliminate anomalies and system malfunctions

12
Example of spectra artefact
kazr-kasacr comparison Range and time kasacr spectrograms 2600m 1500m Spurious bulges appear at the sides of kasacr spectra where there should be only noise (kazr) 800m 15 Sep :32 to 19:58
 800m. 15 Sep :32 to 19:58.")
13
Trade-offs

14
Time integration – Variability of the scene
Accuracy of the 3 moment estimates increases with the number of samples (i.e. time integration) , it is true also for the spectral density But, because of the variability of weather signals, the time integration cannot be too long without losing detailed features of the spectra Example: simulation of time integration over a changing scene Homogeneous DSD (but it can vary as well!) 1 m/s vertical wind gradient within the time integration The W-band spectrum obtained is smoothed (similarly to a broadening effect)
 , it is true also for the spectral density. But, because of the variability of weather signals, the time integration cannot be too long without losing detailed features of the spectra. Example: simulation of time integration over a changing scene. Homogeneous DSD (but it can vary as well!) 1 m/s vertical wind gradient within the time integration. The W-band spectrum obtained is smoothed (similarly to a broadening effect)")
15
Range ambiguity Power Time
Ts Ts Ts Time For Doppler radars operated with a uniform PRT Ts, the unambiguous range is defined as If scatterers have range r larger than cTs/2, their echoes for the nth transmitted pulse are received after the (n+1)th pulse is transmitted. Therefore, these echoes are received during the same time interval as echoes returned from scatterers at r < cTs/2 from the (n+1)th pulse
th pulse is transmitted. Therefore, these echoes are received during the same time interval as echoes returned from scatterers at r < cTs/2 from the (n+1)th pulse.")
16
The Doppler Dilemma The maximum unambiguous Doppler velocity (Nyquist velocity) is directly proportional to PRF (1/Ts) and λ: But, the maximum unambiguous range Rmax is inversly proportional to PRF (proportional to Ts): Combination of both equations: Need to find a compromise between maximum range and maximum Doppler velocity. Example: W-band radar Rmax= 15 km vdop, max = 8 m/s
: Combination of both equations: Need to find a compromise between maximum range and maximum Doppler velocity. Example: W-band radar. Rmax= 15 km vdop, max = 8 m/s.")
17
Spectral resolution Va=18 m/s Va=6 m/s
The number NFFT of points in a spectrum corresponds to the number of samples used to perform the FFT. This number is generally kept lower than ~500 for a question of data storage the spectral resolution Dv is related to the unambiguous velocity through 16 points FFTs of the same spectrum Va=18 m/s Va=6 m/s In order to keep a sufficient spectral resolution, the unambiguous velocity must not be too large Example: Simulation of a spectrum with insufficient resolution

18
Liquid vs ice - Aliasing
40dB 15dB 0.7 m/s 8 m/s Typical fall velocity: rain 0-10 m/s, snow-graupel 0-4 m/s Need better spectral resolution for ice and larger va for rain in order to avoid velocity aliasing Example on the simulator -> aliasing of a Rain spectrum

19
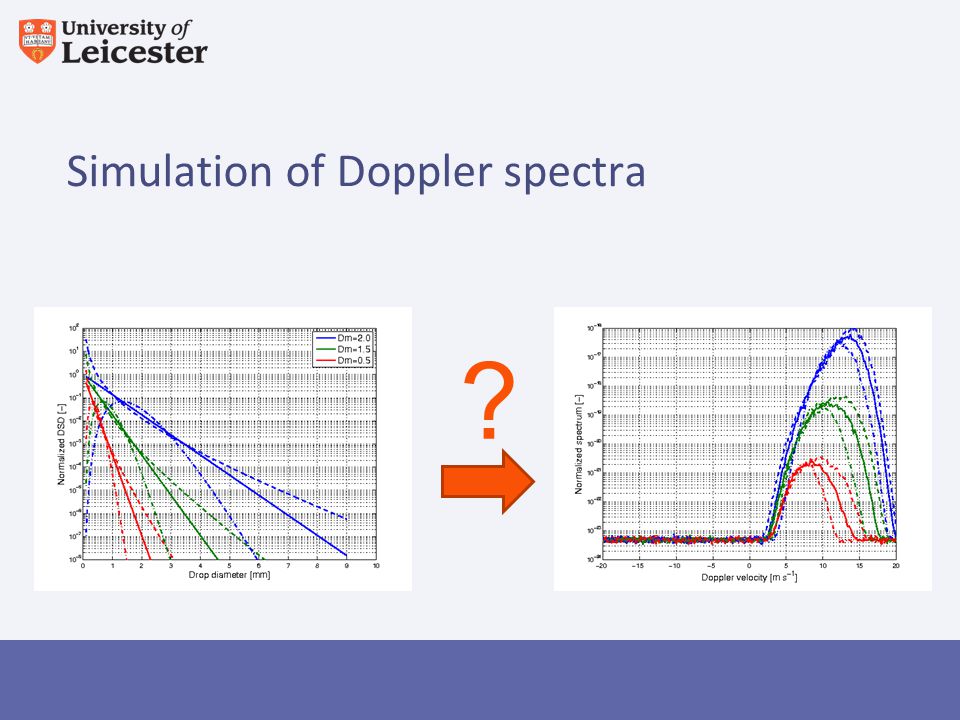
Simulation of Doppler spectra
?
20
Radar Doppler Spectra Modeling
Microphysical Model Particle Size Distribution Phase, Density Fall Velocity Air state Model Air motion Turbulence E/M Radiation Model Scattering/Absorption Dielectric properties Instrument Model Tx/Rx Parameters Pulse/Antenna Pattern Signal Processing

21
Microphysics modelling
Shape: sphere, spheroid, other? Phase: liquid, solid, mixed? Number concentration: N(D) Mass: m(D) Cross section area: A(D) Density: ρ(D)
 Mass: m(D) Cross section area: A(D) Density: ρ(D)")
22
Air state modelling Vertical wind w
Air broadening: wind shear, turbulence (eddy dissipation rate) Air density correction
 Air density correction.")
23
Signal processing modelling
Receiver noise: white spectrum (independent of velocity) Random fluctuation of the signal: the weather signal is exponentially distributed. It can be written as (with x a uniformly distributed random number between 0 and 1): (Zrnic, 1975), Kollias et al., 2011) Example on the simulator -> effect of the number of samples
 Random fluctuation of the signal: the weather signal is exponentially distributed. It can be written as (with x a uniformly distributed random number between 0 and 1): (Zrnic, 1975), Kollias et al., 2011) Example on the simulator -> effect of the number of samples.")
24
Break

Similar presentations




 Atlas (1989)>")




 › Spectrum width is a measure of the velocity dispersion within a sample volume or a measure of the variability.>")









