Download presentation
Presentation is loading. Please wait.

1
Intelligent Legged Robot Systems AME498Q/598I Intelligent Systems 19NOV03

2
Current State (1) Source: PlusTech, Inc. 1995 1991 Forest Walker Hexapod
 Source: PlusTech, Inc Forest Walker Hexapod")
3
Current State (2) Source: PlusTech, Inc.
 Source: PlusTech, Inc.")
4
Why Use Legged Locomotion? Source: Machines That Walk Fuel Economy High Speed Great Mobility “The Great Chase” by Thomas D. Magelsen Better Isolation from Terrain Less Environmental Damage

5
Timeline (1) The G.E. Quadruped ASV Hexapod OSU Hexapod
 The G.E. Quadruped ASV Hexapod OSU Hexapod")
6
Timeline (2) AttilaTITAN VIII RHex Lauron IICWU Hexapod
 AttilaTITAN VIII RHex Lauron IICWU Hexapod")
7
Applications Urban Reconnaissance Mapping over uneven terrain Intelligence ?

8
Aspects of A Legged Vehicle Design and actuation of legs and sensors Control of Legged Vehicles Gait Planning Navigation, Self-Localization, Map-Building, etc. Walk, Run, Trot, etc. Position Control and Compliant Force Low High

9
Movies

10
Intelligent Leg Systems Intelligent: A capability of a system to sustain desired behavior under the condition of uncertainty. >> Artificial Neural Network, Genetic Algorithms, Fuzzy Logic Examples in Legged Robot Foothold/slip detection and reflexes Contour Predictions Ability Disturbance Rejection and Fault Tolerance Continuum Gait Generation

11
Artificial Neural Network (ANN) An imitation of biological nervous system (i.e. brain) (+) Learning ability and adaptive-ness (-) Ill-suited for logical and arithmetic operations Weighting Factors, Unsupervised/Supervised Training, Feed Forward and Back-Propagation Input Output
 (+) Learning ability and adaptive-ness (-) Ill-suited for logical and arithmetic operations Weighting Factors, Unsupervised/Supervised Training, Feed Forward and Back-Propagation Input Output.")
12
Artificial Neural Network (ANN) Differences between ANN and Traditional Computing ANN is not sequential (one problem rule at a time), rather it is parallel Learn by examples, rather than by rules (i.e. expert systems) Computational Cost ANNTraditional Program Memory Cost More limitedGrows indefinitely Can traditional program learn? Same for all inputsGet worse w/ experience
 Computational Cost ANNTraditional Program Memory Cost More limitedGrows indefinitely Can traditional program learn. Same for all inputsGet worse w/ experience.")
13
Genetic Algorithm (GA) Search procedure using the mechanics of natural selections Used to solve difficult optimization problems (with many local optima) Differences between GA and Traditional Methods (GB) GA uses a set of points rather than a single point GA is probabilistic in nature, not deterministic GA is inherently parallel Gene, Chromosome, Fitness Function, Asexual/Sexual Reproduction, Crossover, Mutation
 Search procedure using the mechanics of natural selections Used to solve difficult optimization problems (with many local optima) Differences between GA and Traditional Methods (GB) GA uses a set of points rather than a single point GA is probabilistic in nature, not deterministic GA is inherently parallel Gene, Chromosome, Fitness Function, Asexual/Sexual Reproduction, Crossover, Mutation")
14
Quiz In term of exemplars, give one difference between ANN and GA! Answer: ANN requires well-chosen, representative exemplars to do well. GA has to make its own exemplars

15
Fuzzy Logic Controller (FLC) ‘Crisp’ conclusion based upon noisy, imprecise inputs Applications: Cruise Control, Washing Machines, etc. Linguistic Terms, Membership Functions, Fuzzification, Inference, Defuzzification CNH 1 0 6090 30 Temp LMH 1 0 5075 25 Humidity Temperature Humidity ColdNiceHot Off Slow Med Slow Med Fast Med Fast Flyin’ Low Med High Fan Power (V) 1 0 1015 5 20 0.65N 0.35C 0.5M 0.5H
 N 0.35C 0.5M 0.5H.")
16
Open Forum What are the shortfalls of FLC? Answer: Needs experts for rule discovery. Requires a lot of fine tuning.

17
FLC to Find Foothold (1) Source: AN710 Philips Semiconductor
 Source: AN710 Philips Semiconductor")
18
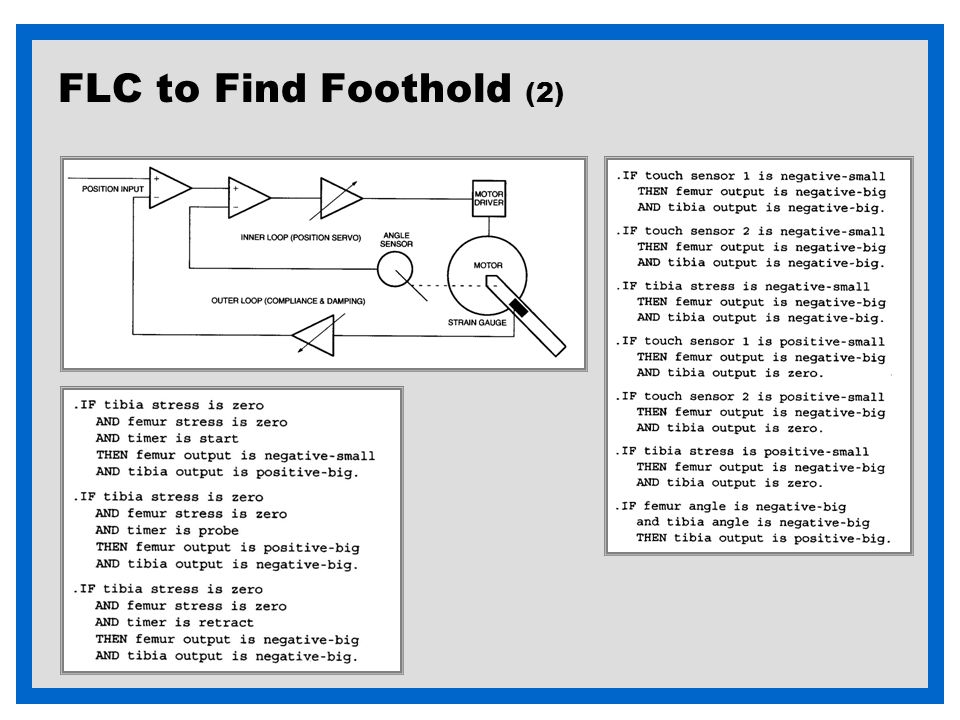
FLC to Find Foothold (2)
")
20
Genetic-Fuzzy (1) Source: Design of a Genetic-Fuzzy System for Planning Optimal Path and Gait for Six-Legged Robot
 Source: Design of a Genetic-Fuzzy System for Planning Optimal Path and Gait for Six-Legged Robot")
21
Genetic-Fuzzy (2)
")
22
Genetic-Fuzzy (3)
")
23
Genetic-Fuzzy (4)
")
24
Predicting Terrain Contours (1) Source: Predicting Terrain Contours using a Feed-Forward Neural Networks
 Source: Predicting Terrain Contours using a Feed-Forward Neural Networks")
25
Predicting Terrain Contours (2)
")
26
Predicting Terrain Contours (3)
")
27
Conclusions Machine Learning (ANN) Computational Evolution (GA) Digital Interfaces with Analog World (FL) Combination of Strategies
 Computational Evolution (GA) Digital Interfaces with Analog World (FL) Combination of Strategies")
Similar presentations





. Some Examples of Biologically Inspired Computation Neural networks Evolutionary computation (e.g., genetic algorithms)>")




 set theory and rules. Developed by Lotfi Zadeh in 1965 Its advantage.>")





 l Bivalent and Multivalent Logics l Linguistic Variables l Fuzzy Sets l Membership Functions l.>")


