Download presentation
Presentation is loading. Please wait.

1
Search and Rescue Optimal Planning System
SAROPS Search and Rescue Optimal Planning System

2
SAROPS Team United States Coast Guard Northrop Grumman
Applied Science Associates Metron

3
Search & Rescue Problem
Create a SAR case when alerted Gather data, estimate uncertainties Use model to determine search area Estimate resource availability and capability Plan the next search Promulgate the search plan Perform the search plan Evaluate the completed search Repeat above until survivors are found and rescued

4
USCG Transition SARTools Joint Automated Worksheet (JAWS)
Near-shore search planning Based on 1950’s paper & pencil technology Computer Assisted Search Planning (CASP) Offshore search planning Based on 1970’s technology SAROPS Technologically current software tool Near-shore and offshore search planning Extensible to land-based search planning
 Offshore search planning. Based on 1970’s technology. SAROPS. Technologically current software tool. Near-shore and offshore search planning. Extensible to land-based search planning.")
5
C2PC(CG) / SAR-PC typical view…
 / SAR-PC typical view…")
6
CASP Typical View via C2PS/SAR Tools

7
SAROPS Prototype Display
C2 = sense, decide, act. --LT Thompson along with the SAROPS system had performed the SENSE function. Now he had to decide where to search and how best to search. --He fed the situational information into the SAROPS Wizard which included things like search object type (42’ deep keel s/v, 6 per liferaft*) the MST etc…SAROPS then produces a probability map of where the search objects are computed to be. The SARSAT hit implies the vessel may have been lost --Success means looking in the right place, finding the search object and rescuing in time. Mathematically this equates to POS=POC x POD within a period of survivability. DECIDE --SAROPS has an optimizer to compute how to maximize POS given a particular probability density distribution and set of rescue resources. In this case there was a helo, a c-130 and WPB. The solution was to break the area into halves and search with a/c while keeping the WPB on scene to assist. ACT -- Today was a good day, the helo spotted AMERICAN under partail sail on its second leg. The helo handed off watch to the C-130 until the WPB arrived to escort AMERICAN under Capt Herndon’s control back to port.
 the MST etc…SAROPS then produces a probability map of where the search objects are computed to be. The SARSAT hit implies the vessel may have been lost. --Success means looking in the right place, finding the search object and rescuing in time. Mathematically this equates to POS=POC x POD within a period of survivability. DECIDE. --SAROPS has an optimizer to compute how to maximize POS given a particular probability density distribution and set of rescue resources. In this case there was a helo, a c-130 and WPB. The solution was to break the area into halves and search with a/c while keeping the WPB on scene to assist. ACT. -- Today was a good day, the helo spotted AMERICAN under partail sail on its second leg. The helo handed off watch to the C-130 until the WPB arrived to escort AMERICAN under Capt Herndon’s control back to port.")
8
SAROPS Goals To provide fast, simple Search & Rescue predictions
Minimise data entry and potential for error Automate data linkages Environmental Data Inputs Search Action Plan Outputs Simple Visualization of Results

9
SAROPS Scenario Types Voyage scenario where object can pass through or loiter in a number of locations (positions or areas) using any combination of great circle and rhumb line routes Initial Position (with bivariate normal uncertainty) and time uncertainty for an event plus an offset for initial location and time of distress Positions obtained from COSPAS-SARSAT, other GMDSS Lines of Bearing (from Radio Direction Finding, Flare Sightings, Loran, and others) Areas defined by polygons “Reverse Drift” scenarios Scenarios may be “weighted”
 using any combination of great circle and rhumb line routes. Initial Position (with bivariate normal uncertainty) and time uncertainty for an event plus an offset for initial location and time of distress. Positions obtained from COSPAS-SARSAT, other GMDSS. Lines of Bearing (from Radio Direction Finding, Flare Sightings, Loran, and others) Areas defined by polygons. Reverse Drift scenarios. Scenarios may be weighted")
10
SAROPS Components Graphical User Interface/ (GUI) Environmental Data Server (EDS) Simulator (SIM)
 Environmental Data Server (EDS) Simulator (SIM)")
11
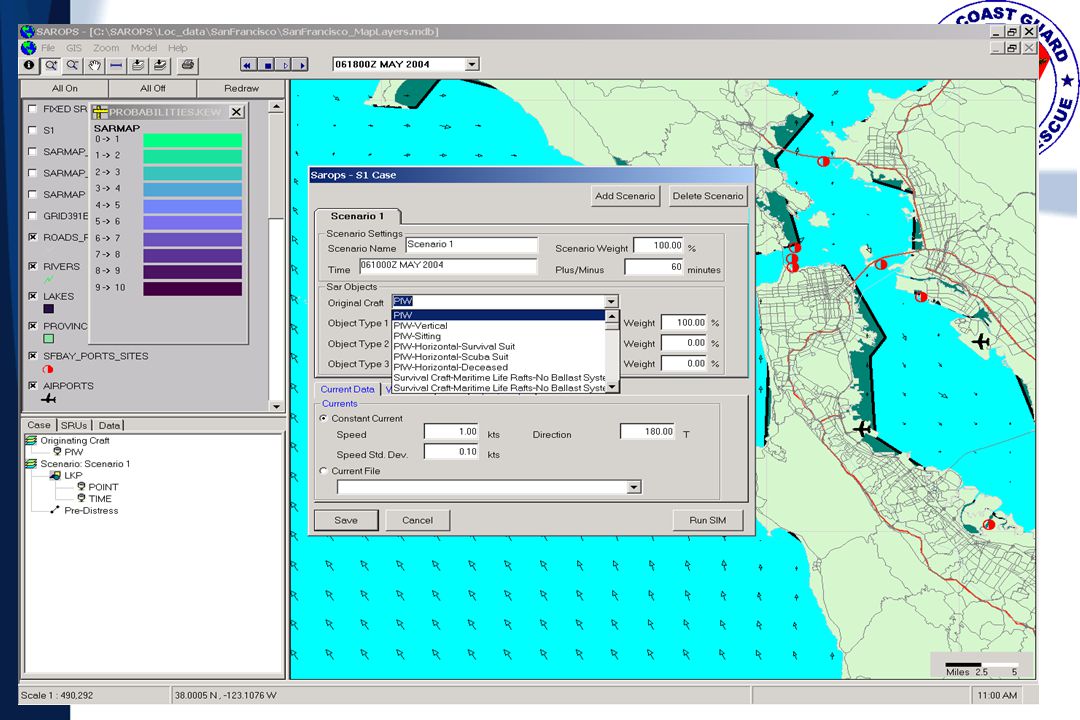
GUI Requirements Deployable on ESRI® GIS mapping engine (C/JMTK)
Wizard based interface Minimize keystrokes Chart support (vector/raster) Display environmental data Animated display capabilities Display recommended search plans/areas/patterns Display probability maps (by scenario, object type or combined) Reporting
 Display environmental data. Animated display capabilities. Display recommended search plans/areas/patterns. Display probability maps (by scenario, object type or combined) Reporting.")
12
Probable Error of Turn Point Position
Example Scenario Home Port Fishing Area A Fishing Area B Probable Error of Turn Point Position A Sample Voyage

13
GUI ENV. DATA SERVER Wind Data SRU Deployment Tools Current Data
Simulator (SIM) Wind Data User Defined Point/Gridded Fields Regional Global Current Data Results SRU Deployment Tools ENV. DATA SERVER
 Wind Data. User Defined. Point/Gridded Fields. Regional. Global. Current Data. Results. SRU Deployment Tools. ENV. DATA SERVER.")
14
SIM Requirements “Monte Carlo” (particle filter) simulation
Simulate pre-distress motion & fixed hazards Simulate distress incidents and outcomes Simulate post-distress motion (drift) Calculate near-optimal search plan (max POS) Simulate simultaneous SRU and Search Object motion (use POD vs. range at CPA on each leg) Compute cumulative POS Account for effects of previous unsuccessful searching when recommending subsequent search plans.
 Calculate near-optimal search plan (max POS) Simulate simultaneous SRU and Search Object motion (use POD vs. range at CPA on each leg) Compute cumulative POS. Account for effects of previous unsuccessful searching when recommending subsequent search plans.")
15
Future SIM Enhancements
Multiple-rectangle Optimal Search Plans Optimal Survivor Search Canadian Cold Environment Survival Model Moving Hazards (Storms, Fronts, etc.) Improved Detection (sensor) Modeling
 Improved Detection (sensor) Modeling.")
16
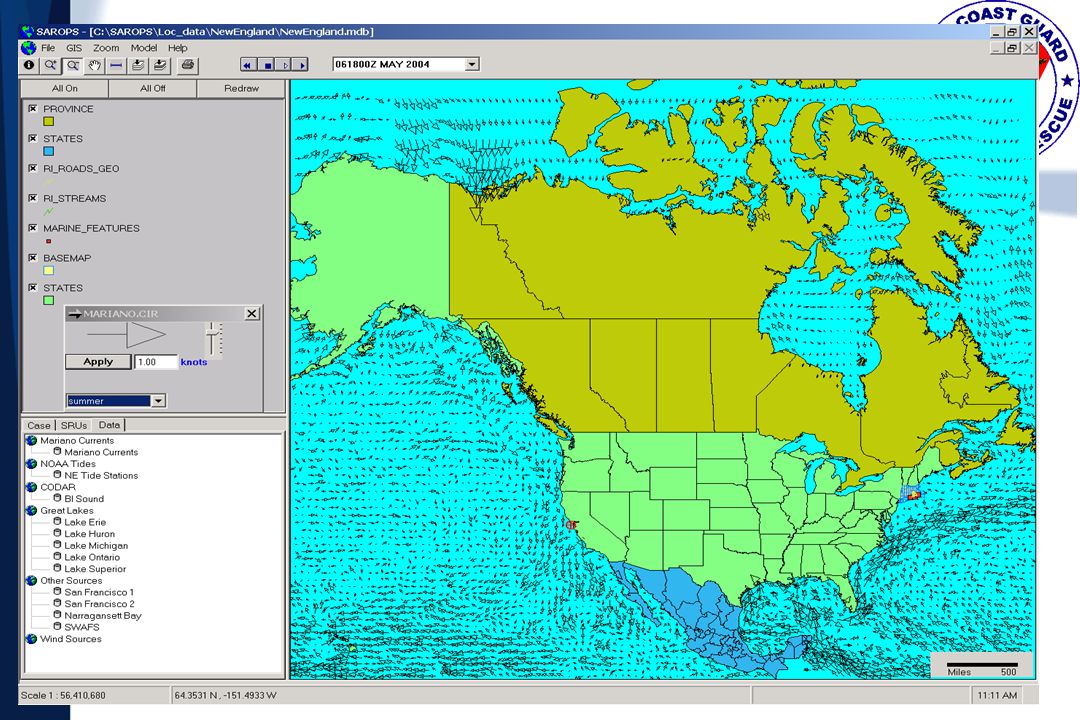
EDS Requirements Water current data Wind data
Other (visibility, cloud cover, sea state, etc) Accommodate scales/resolutions automatically Global land database Expansion of data products and uses
 Accommodate scales/resolutions automatically. Global land database. Expansion of data products and uses.")
17
EDS Common File Format Gridded Point Finite Element SIM

18
How do they communicate?
GUI SIM Sarops COM Extension “launch process” SaropsSim Java NetCDF XML DBF all on same machine SIM->ENV tightly coupled SHP/ DBF EDS .NET Web Services

19
ArcGIS Mapping Framework
ArcGIS based Architecture - Conceptual WWW C O P EXT ArcGIS Mapping Framework TMS GEBASE EDS Maptech MORE EXT’S 3D Analyst SAROPS Extension GUI SIM SAR Tools Extension Flares, Patterns, Etc Spatial - A GeoStat - A WeatherFlow C-Map Other…

20
SAROPS Prototyping

21
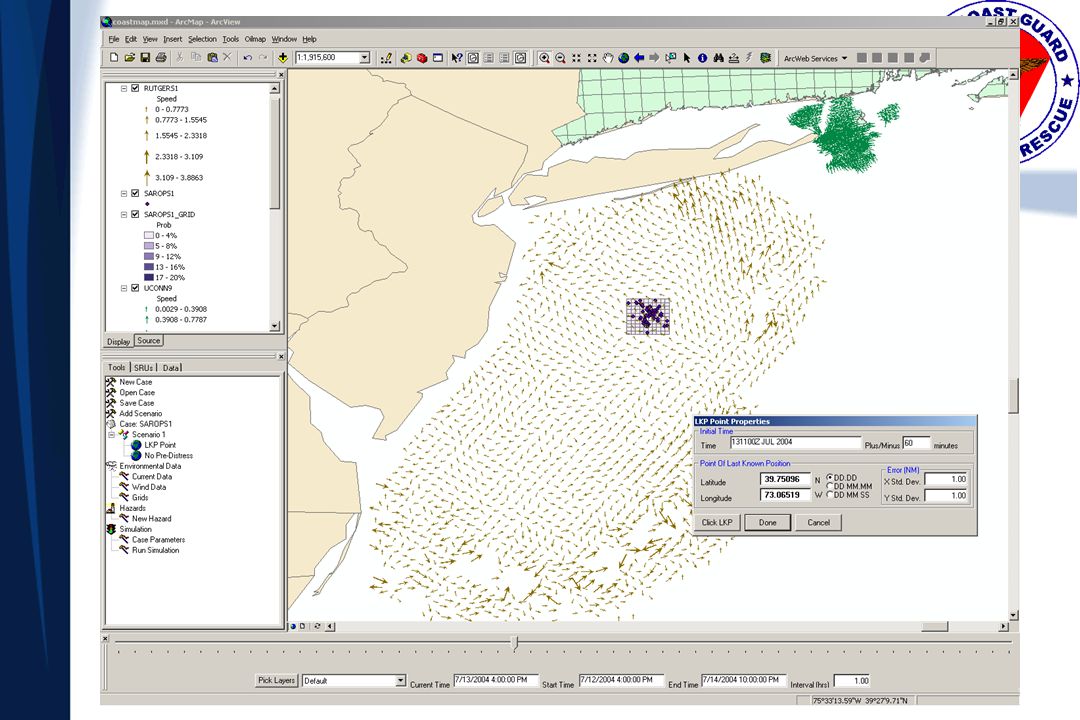
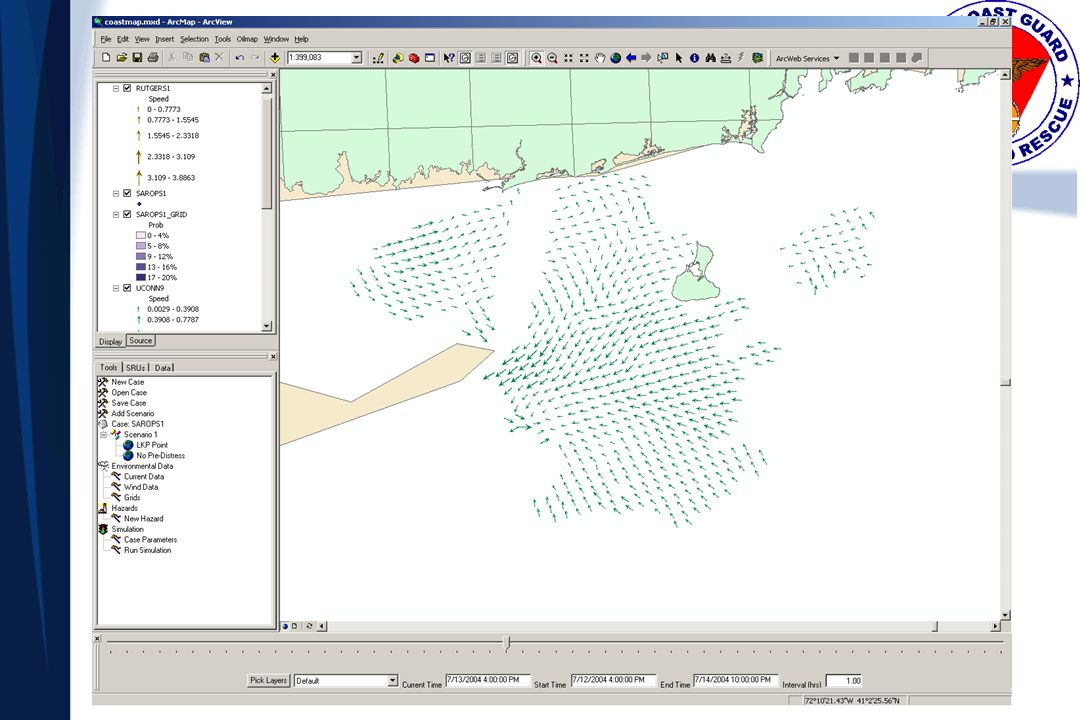
Example of Fixed Hazard

22
Example of Fixed Hazard

23
Example of Fixed Hazard

27
SAROPS/CODAR Estimate
Tidal Only SAROPS/CODAR Estimate Actual Drift

36
Thank You!

Similar presentations













>")
>")






 1st Student Workshop on Wireless Sensor.>")




