Download presentation
Presentation is loading. Please wait.

1
Robert Barnes Utah State University Department of Electrical and Computer Engineering Thesis Defense, November 13 th 2008

2
Introduction & Background System Design Results & Conclusions

3
Increasing Demands for Spacecraft Low Power Fault Tolerant Flexibility High Performance Solution: FPGA

4
Flexible Extended Kalman Filter (EKF) System on an FPGA Adaptable to changing performance requirements (scalable). System adaptable to other algorithms (DWT). Outperform RAD750 PowerPC Explore applications of dynamic reconfiguration.
. Outperform RAD750 PowerPC Explore applications of dynamic reconfiguration..")
5
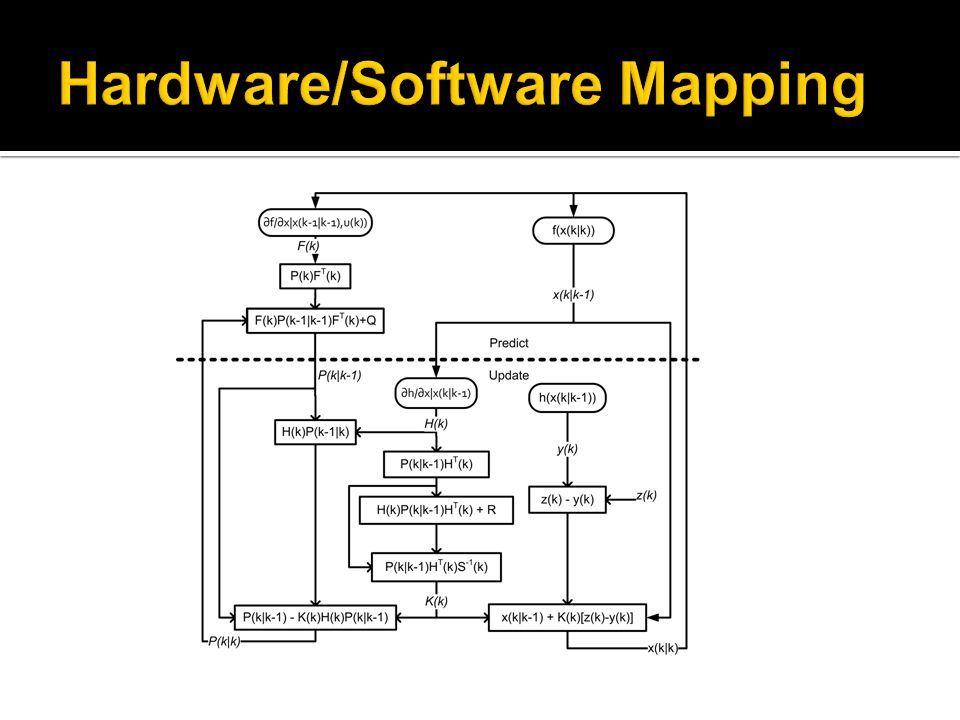
To navigate in space an autonomous spacecraft must accurately estimate its state from noisy measurements. The filter is very flexible Estimate a system’s state from only a single sensor Estimate the bias in sensors Determine an unknown system model Predict a future states

9
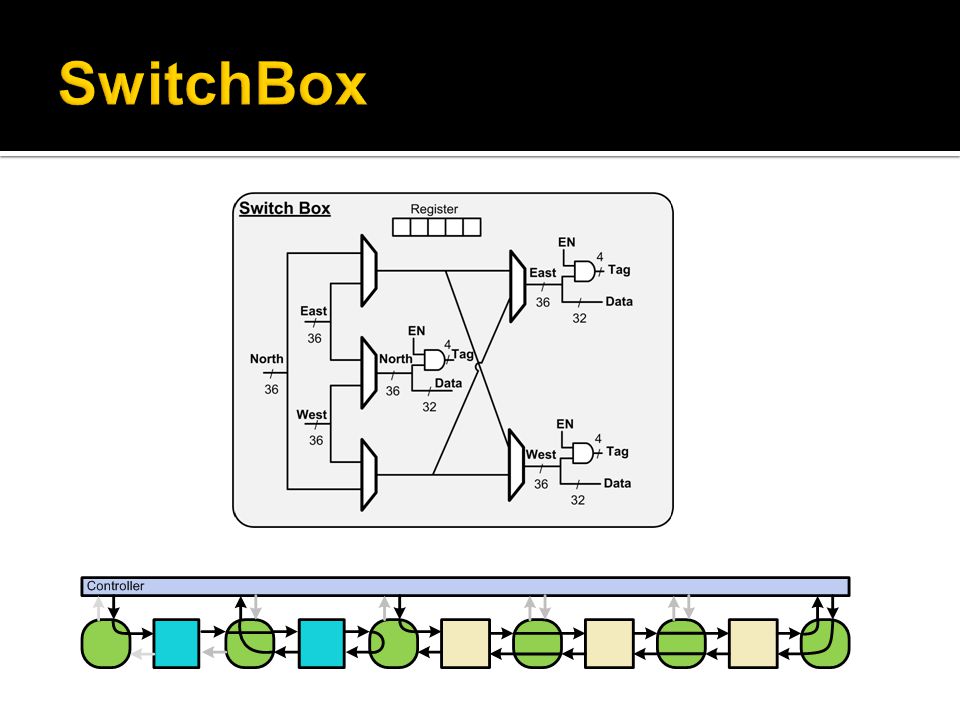
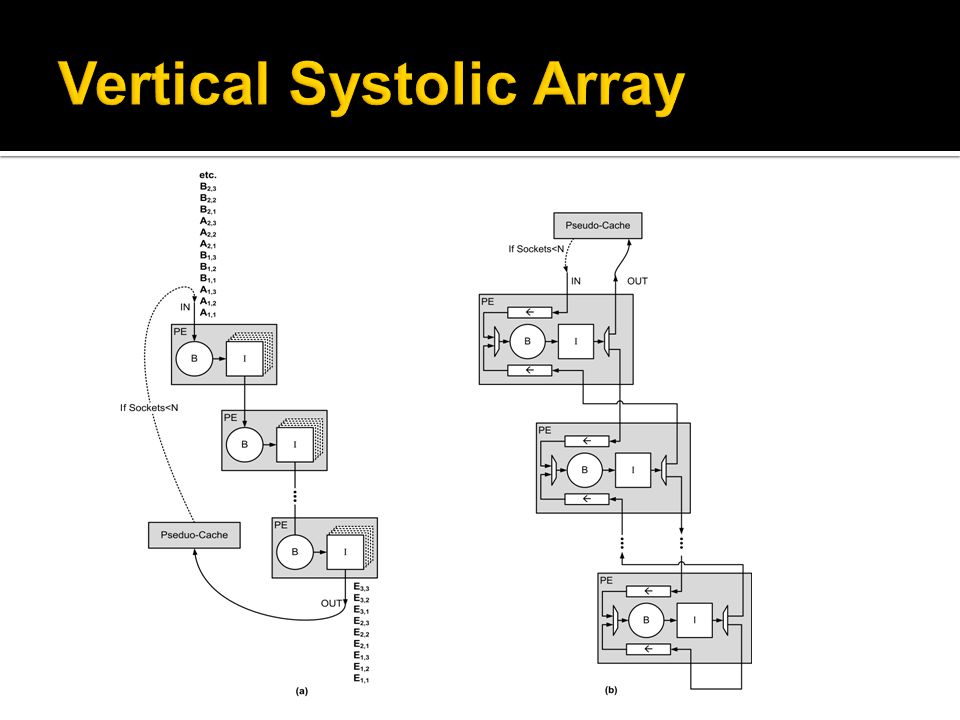
A network of simple processing elements (PE) which rhythmically process and pass data to nearest neighbours to process larger complex tasks. Features: Modularity Regularity Locality Synchronous Pipelined Data Reuse

11
Figure Source: Jeff Carver

12
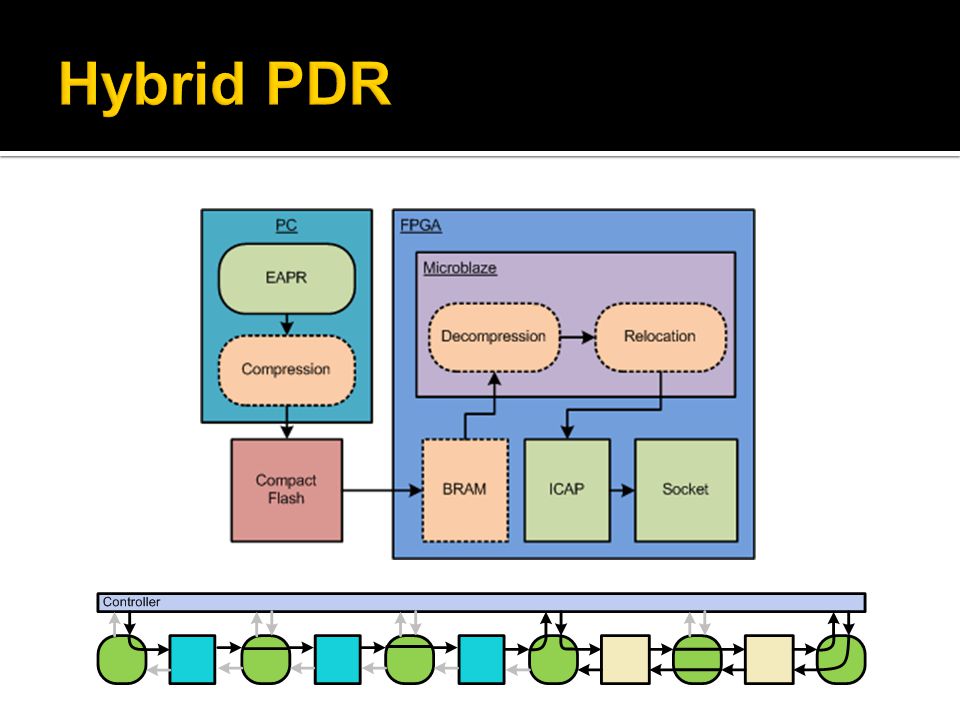
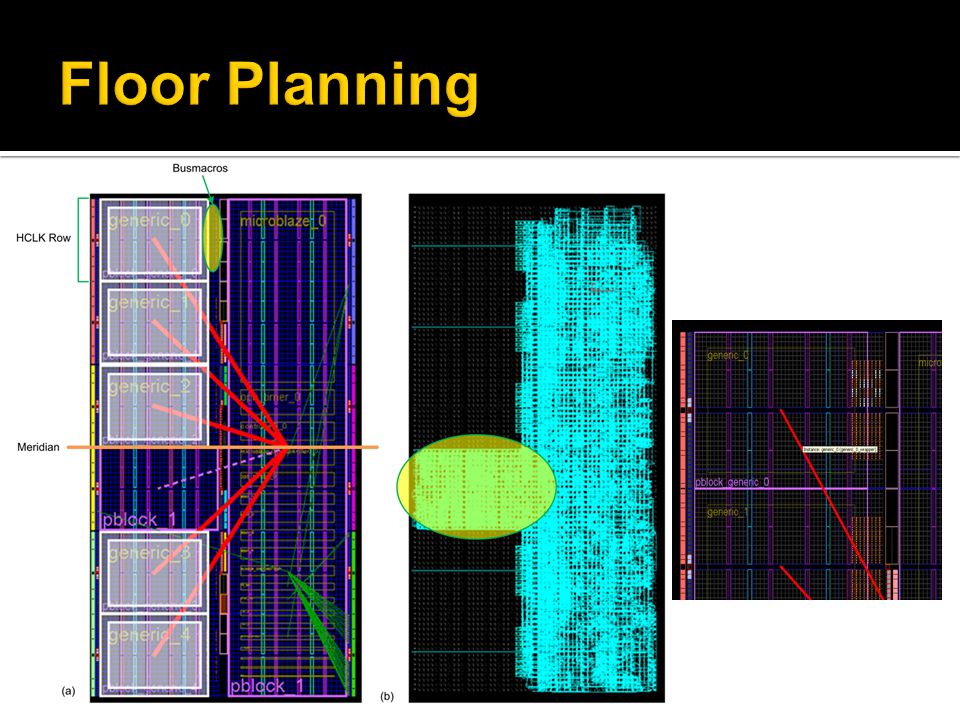
JBits Interface to make changes to the Bitstream Modular Design Flow Early Access Design Flow Improved Modular Design Flow

13
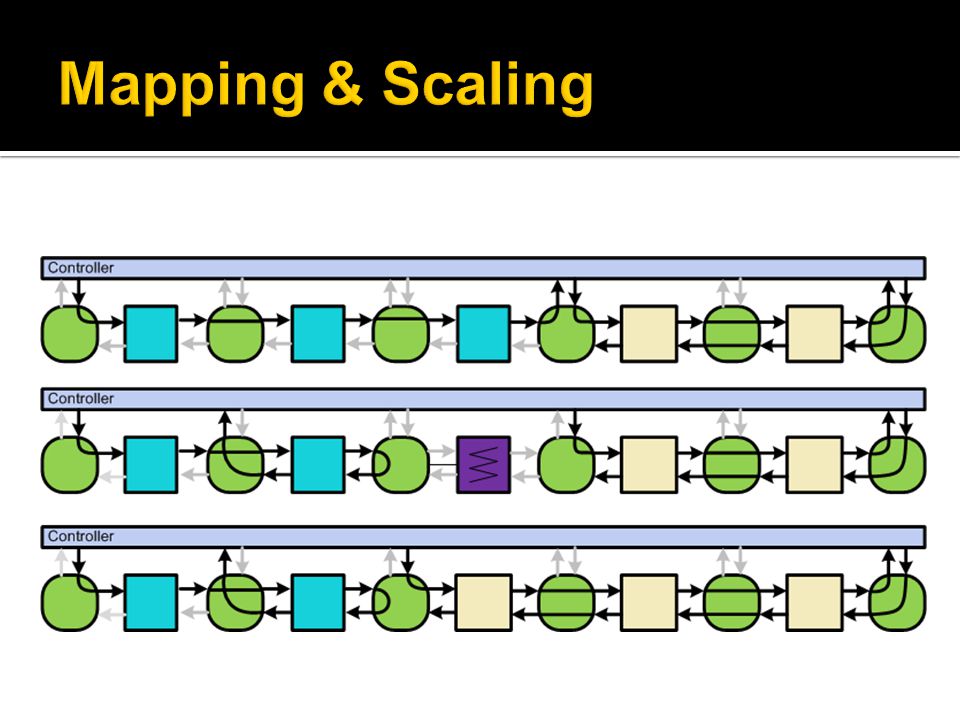
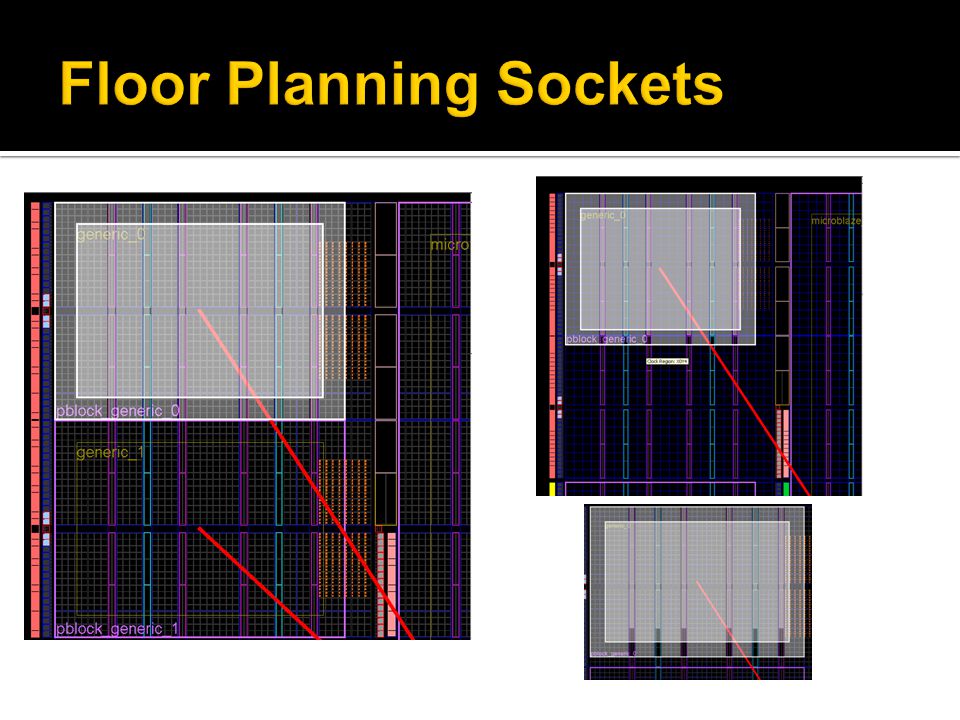
Soft scaling Using conditional variable loops and conditional statements, software can easily be made to scale to different parameters. Static Hardware Scaling Using MUXes a hardware architecture can be designed where data can be re-routed to different hardware cores. Reconfigurable Hardware Scaling Using partial dynamic reconfiguration the physical size of the systolic array can be scaled.

14
Introduction & Background System Design Results & Conclusions

15
PolySAF Co-Processor

24
Introduction & Background System Design Results & Conclusions

31
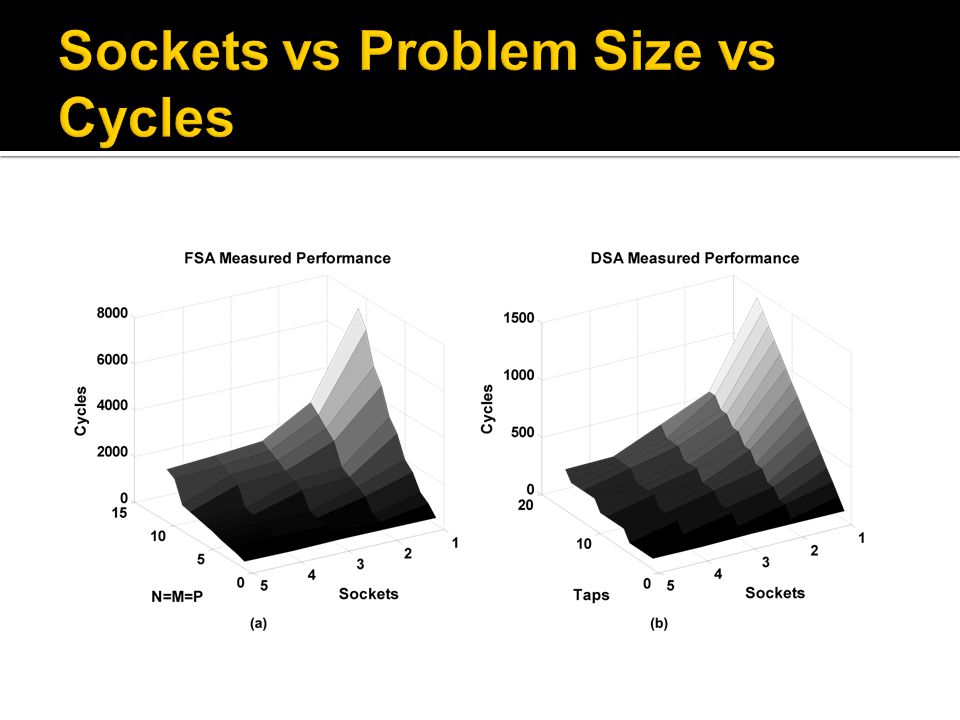
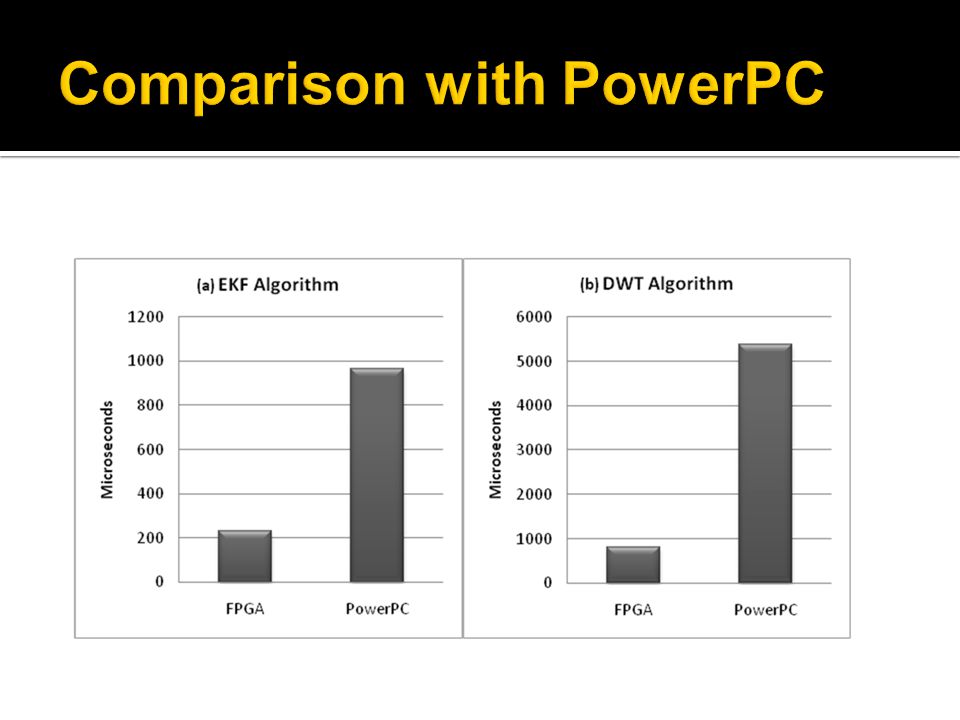
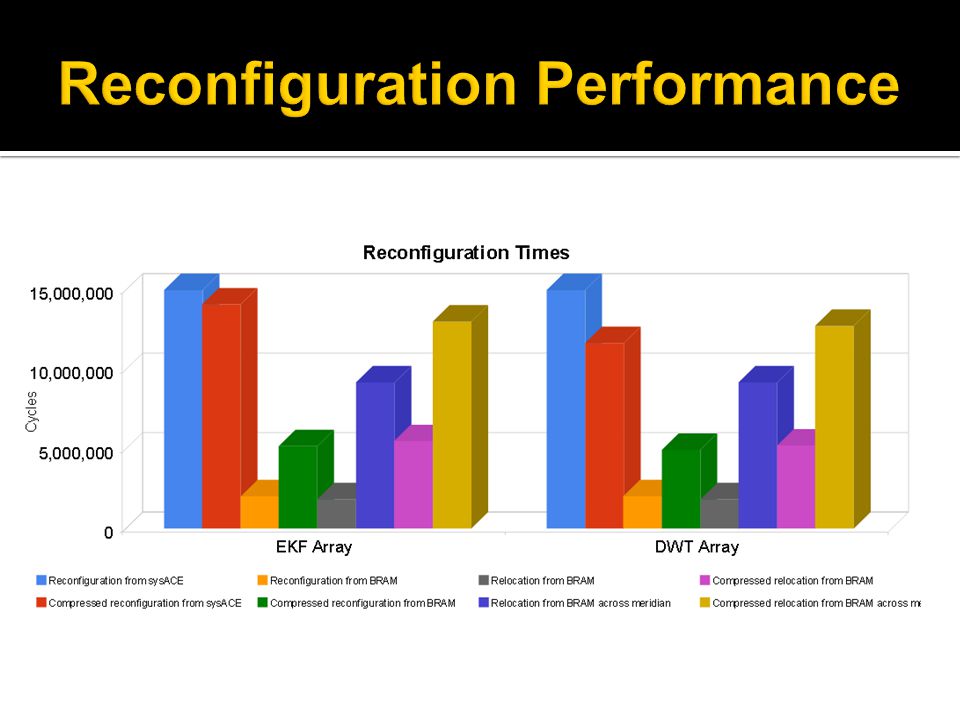
A polymorphic systolic array framework (PolySAF). Programmable switchboxes and protocol to allow dynamic scaling in the array. Efficient EKF and DWT accelerators Speedup of at least 4.18x and 6.61x over PowerPC for EKF and DWT. Integration of bitstream relocation and bitstream compression into a practical system. 2.7x improvement in reconfiguration time. A 44% improvement in BRAM usage. The flexible and simple framework allows this design to host a broad range of algorithms. Dynamic reconfiguration is powerful, but it is not useful in every application. The trade-offs must be weighed carefully.

33
R. Barnes and A. Dasu, “Hardware/software Co- designed Extended Kalman Flter on an FPGA,” in The International Conference on Engineering of Reconfigurable Systems and Algorithms (ERSA), 2008. R. Barnes, A. Dasu, J. Carver, and R. Kallam, “Dynamically Reconfigurable Systolic Array Accelerators: A case study with EKF and DWT Algorithms,” Institution of Engineering and Technology (IET) Computers & Digital Techniques. In Review.
, R. Barnes, A. Dasu, J. Carver, and R. Kallam, Dynamically Reconfigurable Systolic Array Accelerators: A case study with EKF and DWT Algorithms, Institution of Engineering and Technology (IET) Computers & Digital Techniques. In Review..")
34
Hours: 4.33wks/month*16m onths*(>40hours/wk) = ~2771hours Embedded C: ~6,000 Verilog Code: ~3,222 Python: ~1015 Tools: EDK ISE Modelsim MatLab Xpower PlanAhead Eclipse Simics Python
 = ~2771hours Embedded C: ~6,000 Verilog Code: ~3,222 Python: ~1015 Tools: EDK ISE Modelsim MatLab Xpower PlanAhead Eclipse Simics Python")
Similar presentations






. But we also need cells that can be designed to fit the specific.>")



 Ecole Polytechnique Federale de Lausanne (EPFL)>")













