Download presentation
Presentation is loading. Please wait.

1
Fault Tolerance in Protein Interaction Networks: Stable Bipartite Subgraphs and Redundant Pathways Lenore Cowen Tufts University

2
Protein-protein interaction

4
PPI: A simple graph model vertices ↔ genes/proteins edges ↔ physical interactions simplifications: undirected loses temporal information difficult to decompose into separate processes conflates different PPI types into one class of "physical interactions"

5
Current data High-throughput methods are allowing us to fill in many edges in our simple model, often between unannotated proteins.

6
What we want: What we have: Question: Can we infer anything about "real" pathways from the low-resolution graph model of pairwise interactions?

7
Interaction types We distinguish here between two types of interaction: – physical interactions – genetic interactions

8
Genetic interactions (epistasis) Only 18% of yeast genes are essential (the yeast dies when they’re removed). yeast. essential gene.gene deleted. yeast dies.

9
Genetic interaction: synthetic lethality nonessential gene.gene deleted. yeast dies. nonessential gene. yeast lives. gene deleted. both genes deleted at once. Some pairs of nonessential genes exhibit interesting correlative relationships.

10
Nonessential Genes – Some genes are non-essential because they are only required under certain conditions (i.e. an enzyme to metabolize a particular nutrient). – Other genes are non-essential because the network has some built-in redundancy. One gene (completely or partially) compensates for the loss of another. One functional pathway (completely or partially) compensates for the loss of another.
. – Other genes are non-essential because the network has some built-in redundancy. One gene (completely or partially) compensates for the loss of another. One functional pathway (completely or partially) compensates for the loss of another..")
11
Redundant pathways and synthetic lethality

12
Kelley and Ideker (2005): Between-Pathway Model (BPM)
: Between-Pathway Model (BPM)")
13
In reality, the data are very incomplete: Between-Pathway Model (BPM)
")
14
Kelley and Ideker (2005) Goal: detect putative BPMs in yeast interactome Method: 1)find densely-connected subsets of the physical protein-protein interaction (PI) network (putative pathways) 2)check the genetic interaction (GI) network to see if patterns in density of genetic interactions correlate with these putative pathways 3)check resulting structures for overrepresentation of biological function (gene set enrichment) and Ulitsky and Shamir (2007)
 Goal: detect putative BPMs in yeast interactome Method: 1)find densely-connected subsets of the physical protein-protein interaction (PI) network (putative pathways) 2)check the genetic interaction (GI) network to see if patterns in density of genetic interactions correlate with these putative pathways 3)check resulting structures for overrepresentation of biological function (gene set enrichment) and Ulitsky and Shamir (2007)")
15
Kelley and Ideker (2005) and Ulitsky and Shamir (2007) (1)(2) (3) enriched for function X enriched for function Y
 and Ulitsky and Shamir (2007) (1)(2) (3) enriched for function X enriched for function Y")
16
Kelley and Ideker (2005) Problems: – Sparse data limits the potential scope of discovery – independent validation is difficult and Ulitsky and Shamir (2007)
 Problems: – Sparse data limits the potential scope of discovery – independent validation is difficult and Ulitsky and Shamir (2007)")
17
Our method We show how to systematically search for stable bipartite subgraphs (putative BPMs) We use only synthetic lethality interactions to search for BPMs: – allows the use of PIs for independent statistical validation of putative BPMs – scope of potential discovery is greater than when using PIs as seed structures
 We use only synthetic lethality interactions to search for BPMs: – allows the use of PIs for independent statistical validation of putative BPMs – scope of potential discovery is greater than when using PIs as seed structures")
18
How should we look for bipartite subgraphs?

19
Maximum bipartition Definition: Given any graph G, a maximum bipartition of G is an assignment of each node of G to one of two sets, A and B, in such a way that the number of edges that CROSS the partition is maximized.

20
Maximum bipartition Definition: Given any graph G, a maximum bipartition of G is an assignment of each node of G to one of two sets, A and B, in such a way that the number of edges that CROSS the partition is maximized. Fact: Maximum bipartition is NP-hard.

21
We don’t want a maximum bipartition anyway! We don’t want to force a choice of sides!

22
Maximal bipartition Definition: Given any graph G, a maximal bipartition of G is an assignment of each node of G to one of two sets, in such a way that moving any single node from one set to the other does not increase the number of edges of G which cross between the two sets.

23
Maximal bipartition

24
Algorithm Randomly assign a set-label to each node in G. Call a node v “happy” if at least half of its neighbors are in the opposite set from v, and “unhappy” otherwise. While there exists an unhappy node: – Pick one such node at random. – Flip its set label.

25
Algorithm (an “unhappy” node flips to “happy.”)
")
26
Algorithm Claim: This procedure terminates in at most |E| steps, where |E| is the number of edges in G. Proof: While a particular node may switch its affiliation many times over the course of the algorithm, notice that each time a flip is performed, the number of edges crossing between the two partitions increases by at least one. So there can be at most |E| steps.

27
Algorithm Claim: On termination, every node is “happy.” Proof: [This is just the termination condition of the while-loop.] Observe that the partition generated in this way is maximal: flipping any single node cannot increase the number of edges crossing between partitions, because all nodes are happy.
![Algorithm Claim: On termination, every node is happy. Proof: [This is just the termination condition of the while-loop.] Observe that the partition generated in this way is maximal: flipping any single node cannot increase the number of edges crossing between partitions, because all nodes are happy.](http://images.slideplayer.com/15/4517500/slides/slide_27.jpg "Algorithm Claim: On termination, every node is happy. Proof: [This is just the termination condition of the while-loop.] Observe that the partition generated in this way is maximal: flipping any single node cannot increase the number of edges crossing between partitions, because all nodes are happy.")
28
Stable Bipartite Subgraph: Motivation If a gene exists within a BPM, then we expect the two pathways of the BPM to fall into opposite sets within most maximal partitions (because the partitioning algorithm is looking to maximize the number of edges crossing between sets). So in a maximal partition, genes in the same pathway as a BPM gene g should tend to be assigned to the same set as g; those in the opposite pathway should wind up in the opposite set; and those in neither pathway should bounce around with little or no correlation to g’s set-assignment.

29
Stable Bipartite Subgraph Definition: For a node m, repeat this procedure k times to find maximal bipartite subgraphs. Let A be the set of nodes that occur in the same partition as m at least r percent of the time. Let B be the set of nodes that occur in the opposite partition of m at least r percent of the time. Return A and B as m’s stable bipartite subgraph.

30
Stable Bipartite Subgraph Definition: For a node m, repeat this procedure k times to find maximal bipartite subgraphs. Let A be the set of nodes that occur in the same partition as m at least r percent of the time. Let B be the set of nodes that occur in the opposite partition of m at least r percent of the time. Return A and B as m’s stable bipartite subgraph. The stable bipartite subgraphs are our BPMs! (k=250; r= 70 percent)
.")
31
Test Datasets original physical + genetic interaction data used in Kelley + Ideker (2005) up-to-date set of physical + genetic interactions taken from BioGRID database (October 2007) 1,678 genes (nodes) 6,818 edges (SL interactions) 682 genes (nodes) 1,858 edges (SL interactions)
 up-to-date set of physical + genetic interactions taken from BioGRID database (October 2007) 1,678 genes (nodes) 6,818 edges (SL interactions) 682 genes (nodes) 1,858 edges (SL interactions)")
32
Return Stable BPMs?

33
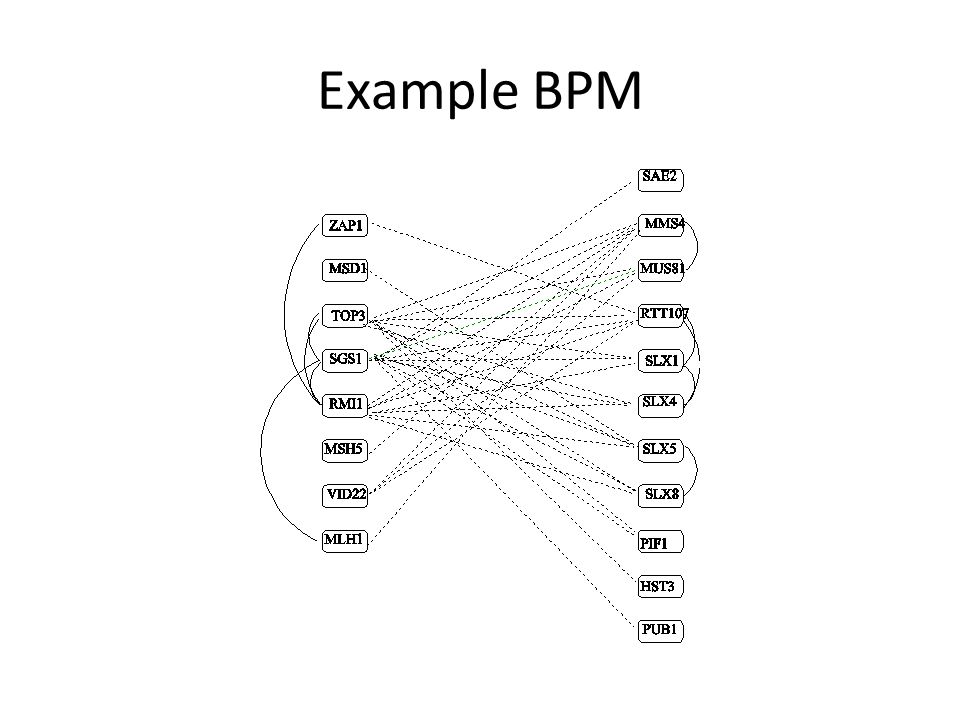
Example BPM

34
How do we know it is meaningful? Biological validation: Enrichment results. We find things that are known to be functionally related in our putative pathways. [GO Enrichment] Statistical validation: - Location of known PI edges - Prediction of new SL edges

35
Results Network BPMsSL edges covered %Enrich. pathways Kelley& Ideker G 360687 251/720 34.9% Our Results G6021,526 643/1204 53.4% Ulitsky& ShamirA G’140<3,765 100/280 35.7% Ulitsky& ShamirB G’270<3,765 177/540 32.8% Our Results G*1,5104,949 1528/3020 50.6%

36
Results SGD GO-SLIM coverage Ulitsky + ShamirUs 46.3%79.8%

37
Results: Dually-enriched BPMs

38
Results: Differentially-enriched BPMs

40
Example BPM

42
Website http://bcb.cs.tufts.edu/.yeast.bpm/

43
Website http://bcb.cs.tufts.edu/.yeast.bpm/

44
Website http://bcb.cs.tufts.edu/.yeast.bpm/

45
Results: BPM Validation In addition to validation based on coherence of biological function, we can also statisticially validate our methods directly from the structure of the network! Method 1: Examine the distribution of known PIs within each BPM.

46
Results: BPM Validation Goal: estimate the probability of seeing as many or fewer physical interactions between the two sets as were actually observed.

47
Results: BPM Validation

48
Method 2: Examine the distribution of new SL interactions appearing within each BPM in the Kelley/Ideker network.

49
Results: BPM Validation Goal: estimate the probability of seeing as many or more new synthetic-lethality interactions appearing between the two sets as were actually observed.

50
Results: BPM Validation Results: Across the set of 175 candidate BPMs from G which contained at least 20 new SL edges in G +, the average probability that the observed between-pathway bias would occur by chance was 0.017. Since these new edges were not used to construct candidate BPMs in G, their distribution bias provides independent support for the hypothesis that stable subgraphs do indeed correspond to biologically meaningful structures.

51
Validation: Microarray Data Rosetta compendium (Hughes et al, 2000): -- contains yeast expression profiles of 276 deletion mutants: i.e. for each gene in the yeast genome, measures how its expression levels change when particular gene g is deleted, as compared to wildtype yeast.

52
Delete a gene in pathway 1; see if changes in pathway 2 coherent

53
log10 ratio BPM Deleted Gene Pathway restriction Sort

54
At step i: N to 1 Calculate weighted percent of genes in pathway seen so far and precent of genes not in pathway: Score is max difference

55
Using a permutation test we sample 99 random subsets of genes the same size as the pathway We calculate the cluster rank score for each of these 99 sets We sort the test plus the pathway score The p-value is the percentile A pathway is validated if its p-value is <=0.1 How to validate a pathway

56
Delete a gene in pathway 1; see if changes in pathway 2 coherent We call a pathway “Validated” if its Cluster Rank Score has p-value <.1

57
Kelley-Ideker Histogram of the Lowest CRS per Pathway per BPM This histogram displays all the CRS scores from all of the results from Kelley and Ideker’s BPMs bucketed according to their lowest p value score. The p value scores <= 0.10 indicate a validated BPM.

58
Ulitskyi Histogram of the Lowest CRS per Pathway per BPM This histogram displays all the CRS scores from all of the results from Ulitskyi’s BPMs bucketed according to their lowest p value score. The p value scores <= 0.10 indicate a validated BPM.

59
Ma Histogram of the Lowest CRS per Pathway per BPM This histogram displays all the CRS scores from all of the results from Ma’s BPMs bucketed according to their lowest p value score. The p value scores <= 0.10 indicate a validated BPM.

60
Brady Histogram of the Lowest CRS per BPM This histogram displays all the CRS scores from all of the results from Brady’s BPMs bucketed according to their lowest p value score. The p value scores <= 0.10 indicate a validated BPM. Clearly, Brady’s BPMs are disproportionately represented in the lower p value range.

61
Results BPM dataset# paths hit knockouts # validated pathways % validated pathways Kelley-Ideker (05) 1601610% Ulitsky- Shamir (07) 36514% Ma et al. (08) 54611% Our results95923024%
 54611% Our results %.")
62
A Tantalizing Peek of What We can Do With More Data! A heat map of the differential expression of yeast genes in pathway 2 in response to the deletion of two different genes (SHE4 and GAS1) from pathway 1 in a validated BPM of Ma et al.
 from pathway 1 in a validated BPM of Ma et al..")
63
A random-gene validation test couples the two pathways together

64
Co-authors and collaborators Arthur Brady Noah Daniels Ben Hescott Max Leiserson Kyle Maxwell Donna Slonim

65
thanks.

66
A Graph Theory Problem Our algorithm samples from the maximal bipartite subgraphs. With what distribution? Is it uniform? Proportional to the number of edges that cross the cut?? ??? What are the properties of the stable bipartite subgraphs of the synthetic lethal network? Are they conserved across species?

67
Approach Run the partitioning algorithm 250 times on the yeast SL network (G). For each gene g in G, – Construct a set A consisting of g and all nodes in G which wind up in the same set as g at least 70% of the time. – Construct another set B consisting of all nodes in G which wind up in the opposite set from g at least 70% of the time. We call the subgraph of G defined by A and B the “stable bipartite subgraph of g”, and designate it as a candidate BPM.

Similar presentations





 Presented By: Dan Baluta.>")













 10/07/09. Outline Affinity propagation Quality evaluation.>")
