Download presentation
Presentation is loading. Please wait.

0
FRC Concepts: Drivetrains
Team 1716 Redbird Robotics

4
Why are drivetrains important?
It moves a robot from point A to point B Not all drivetrain designs are equal each have advantages and disadvantages, and not all are entirely obvious A robot’s drivetrain is the most basic part of the robot It MUST be reliable A major consideration for pit scouting

5
Rules of Drivetrain Design
Keep It Simple, Stupid It’s a drivetrain, not a space station Simple usually means reliable, too It Must Meet Our Needs Field and operating conditions are the two primary considerations for picking the type of drivetrain we will be going with

6
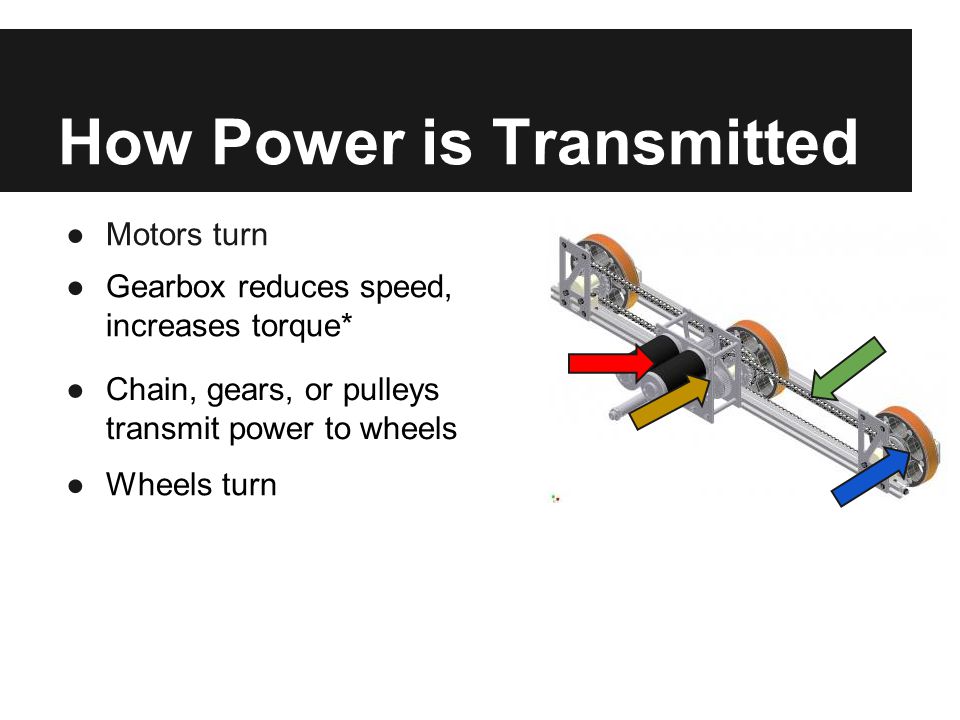
How Power is Transmitted
Motors turn Gearbox reduces speed, increases torque* Chain, gears, or pulleys transmit power to wheels Wheels turn

8
How a Drivetrain is Controlled
Arcade One joystick controls direction Tank Two joysticks control either side of drivetrain

9
Why YOU need to know all this
The engineering and scouting divisions need you to know what you’re talking about

10
Common Drivetrain Styles
“Skid” Systems 2WD, 4WD, 6WD, 6WD+ Tank Treads/Belting Traditional/WCD Holonomic Systems Swerve (Crab) Mecanum
 Mecanum.")
11
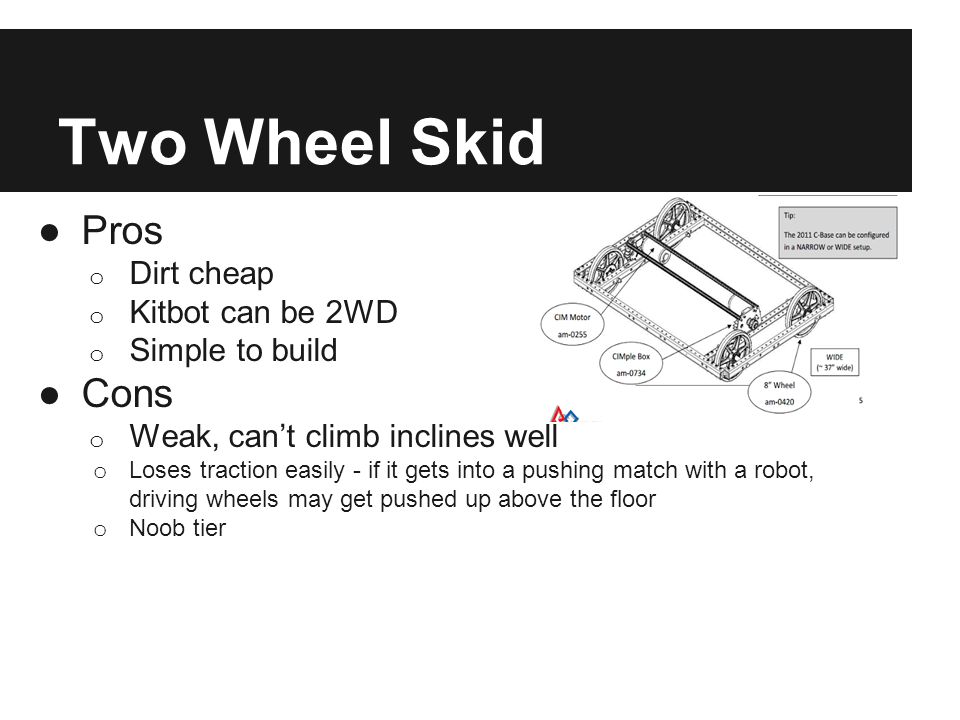
Two Wheel Skid Pros Cons Dirt cheap Kitbot can be 2WD Simple to build
Weak, can’t climb inclines well Loses traction easily - if it gets into a pushing match with a robot, driving wheels may get pushed up above the floor Noob tier

13
Four Wheel Skid Pros The Bad Easier to control Simple, more traction
Turning is more difficult (both wheels have traction) A compromise between stability and maneuverability Still noob tier
 A compromise between stability and maneuverability. Still noob tier.")
15
Six Wheel Skid Middle wheel is offset, essentially creating two 4WD systems Pros Plenty of traction Minimized resistance to turning due to middle wheel offset Cons Drivetrain “rocks” slightly due to middle wheel offset Can be significant if robot has long arms and appendages

17
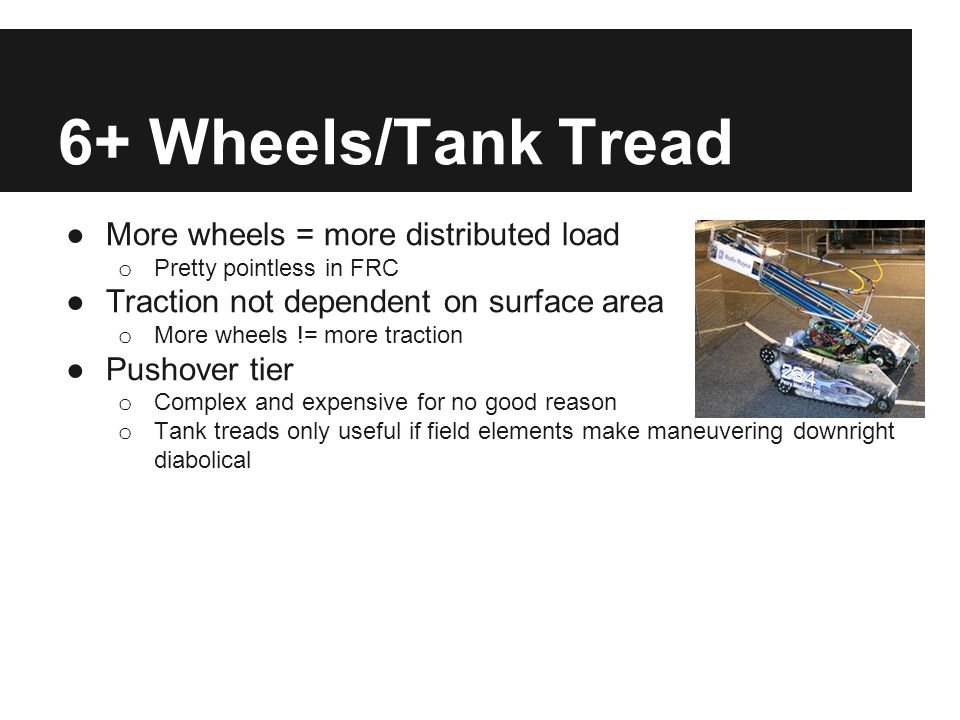
6+ Wheels/Tank Tread More wheels = more distributed load
Pretty pointless in FRC Traction not dependent on surface area More wheels != more traction Pushover tier Complex and expensive for no good reason Tank treads only useful if field elements make maneuvering downright diabolical

21
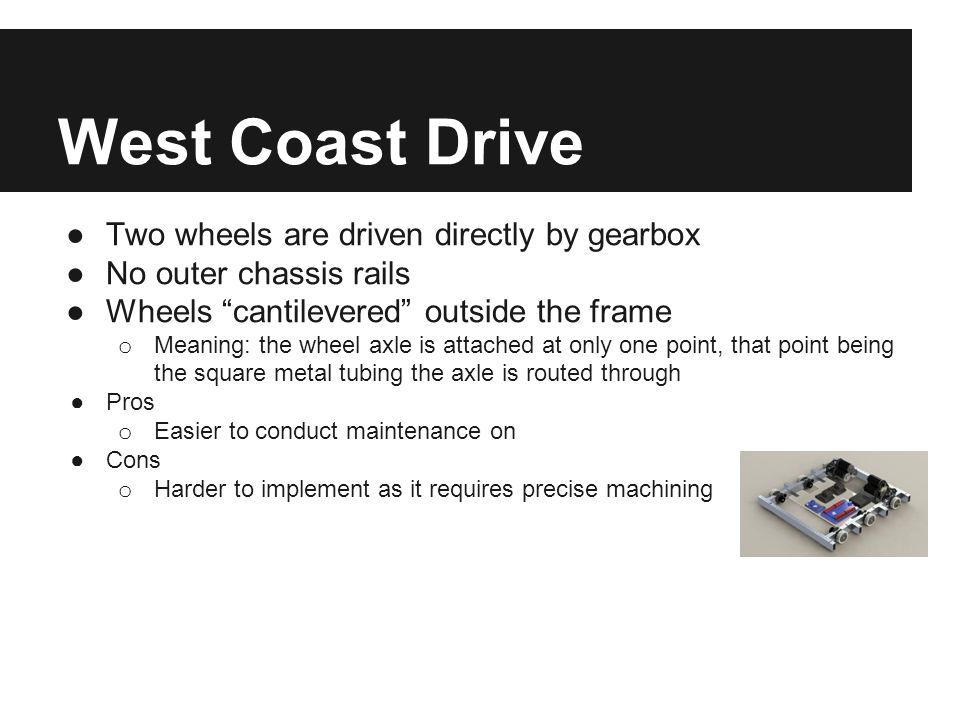
West Coast Drive Two wheels are driven directly by gearbox
No outer chassis rails Wheels “cantilevered” outside the frame Meaning: the wheel axle is attached at only one point, that point being the square metal tubing the axle is routed through Pros Easier to conduct maintenance on Cons Harder to implement as it requires precise machining

25
Holonomic Drive Systems
Allows a robot to move in two dimensions, instead of just forward and backward This allows it to rotate simultaneously It can also do this WITHOUT rotating Two major systems Swerve/Crab Mecanum/Omni

26
Swerve Each wheel can (at least theoretically) be independently driven and steered In practice, arcade or tank drive is utilized to simplify steering Pros Highest maneuverability Cons Complex to build, maintain, code, and operate. Also quite heavy

30
Mecanum/Omni Uses vector addition to allow for omnidirectional motion
No complex steering mechanisms Requires four independent wheels Mass-produced parts make this drivetrain accessible (compared to swerve)
")
36
Four Guidelines of Drivetrain Design
RRRR Reliability Repairability Relevance Resonability

37
Reliability Most important consideration Good practices
It’s the most important part of the robot Good practices Wheels be aligned properly Reduce or remove friction wherever possible Components must be manufactured to a high degree of quality and accuracy Components must be durable (no wood or plastic)
")
38
Repairability It won’t be reliable 100% of the time, but it should be close Good practices: Accessibility Have plenty of spare parts for quick repairs at competition Maintenance and repair times should be quick (<10 min)
")
39
Relevance Everything on a drivetrain must be worth the work and risk of including it Driving around in circles doesn’t require tank treads or swerve Maneuvering around in tight spaces or climbing bumps in the game field may make one of them more worth it, however

40
Reasonability We have a limited amount of time and money during the build season We have to allot our resources very carefully, and putting that time and money into something that won’t offer a good return is a bad idea this is the reason we didn’t go swerve last year (we’d have to figure it out in only a few weeks)
")
41
Resources www.chiefdelphi.com
FRC Drivetrain Design and Implementation PPT:

Similar presentations



















. Students should lead their teams in the building, design, and all other aspects of the robot. Knowledge of the Kit.>")






 Swerve Drive Holonomic (Omni) Drive Mecanum Drive.>")





 Swerve (Crab) Drive Holonomic.>")