Download presentation
Presentation is loading. Please wait.

1
Physics 101: Chapter 9 Today’s lecture will cover Textbook Sections 1

2
Rotation Summary (with comparison to 1-D kinematics)
See text: chapter 8 Rotation Summary (with comparison to 1-D kinematics) Angular Linear And for a point at a distance R from the rotation axis: x = Rv = R a = R See Table 8.1
 Angular Linear. And for a point at a distance R from the rotation axis: x = Rv = R a = R. See Table 8.1.")
3
Rotational analog of force
See text: chapter 9 New concept: Torque Rotational analog of force Torque = (magnitude of force) x (lever arm) t = F l
 x (lever arm) t = F l.")
4
Comment on axes and sign (i.e. what is positive and negative)
Whenever we talk about rotation, it is implied that there is a rotation “axis”. This is usually called the “z” axis (we usually omit the z subscript for simplicity). Counter-clockwise (increasing q) is usually called positive. Clockwise (decreasing q) is usually called negative. +w z
. Counter-clockwise (increasing q) is usually called positive. Clockwise (decreasing q) is usually called negative. +w. z.")
5
Chapter 9, Preflight The picture below shows three different ways of using a wrench to loosen a stuck nut. Assume the applied force F is the same in each case. In which of the cases is the torque on the nut the biggest? 1. Case Case Case 3 CORRECT

6
Chapter 9, Preflight The picture below shows three different ways of using a wrench to loosen a stuck nut. Assume the applied force F is the same in each case. In which of the cases is the torque on the nut the smallest? 1. Case Case Case 3 CORRECT

9
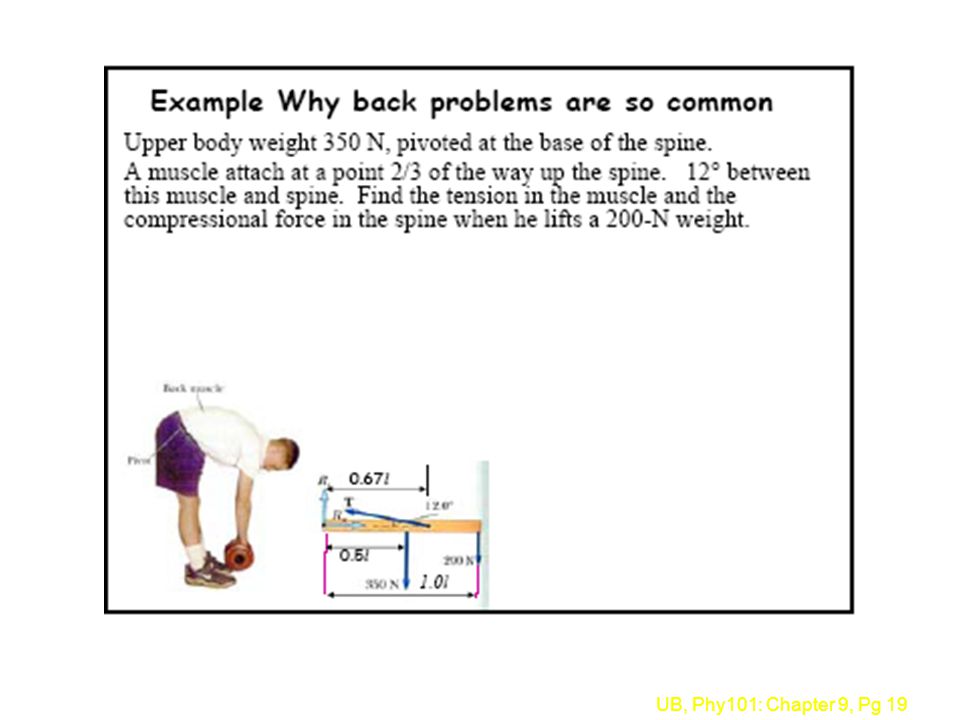
torque about pivot due to gravity: g = mgd
Static Equilibrium A system is in static equilibrium if and only if: acm = 0 Fext = 0 = 0 ext = 0 (about any axis) Center of mass pivot d W=mg torque about pivot due to gravity: g = mgd (gravity acts at center of mass) This object is NOT in static equilibrium
 Center of mass. pivot. d. W=mg. torque about pivot due to. gravity: g = mgd. (gravity acts at center of mass) This object is NOT in static equilibrium.")
10
Not in equilibrium Equilibrium Torque about pivot 0
Center of mass pivot d W=mg Torque about pivot 0 Center of mass pivot Torque about pivot = 0 Not in equilibrium Equilibrium

11
Homework Hints Painter is standing to the right of the support B. FA
FB Mg mg What is the maximum distance the painter can move to the right without tipping the board off?

12
Homework Hints If its just balancing on “B”, then FA = 0
the only forces on the beam are: x FB Mg mg Using FTOT = 0: FB = Mg + mg This does not tell us x

13
t (FB ) = 0 since lever arm is 0
Homework Hints Find net torque around pivot B: (or any other place) FB d1 d2 Mg mg t (FB ) = 0 since lever arm is 0 t (Mg ) = Mgd1 Total torque = 0 = Mgd1 -mgd2 t (mg ) = -mgd2 So d2 = Md1 /m and you can use d1 to find x
 FB. d1. d2. Mg. mg. t (FB ) = 0 since lever arm is 0. t (Mg ) = Mgd1. Total torque = 0 = Mgd1 -mgd2. t (mg ) = -mgd2. So d2 = Md1 /m and you can use d1 to find x.")
14
Homework Hints Painter standing at the support B.
Find total torque about this axis D FA FB d Mg mg t(FA) = - FAD t(Mg) = Mgd Total torque = 0 = Mgd -FAD t(FB) = 0 (since distance is 0) So FA = Mgd /D t(mg) = 0 (since distance is 0)
 = - FAD. t(Mg) = Mgd. Total torque = 0 = Mgd -FAD. t(FB) = 0 (since distance is 0) So FA = Mgd /D. t(mg) = 0 (since distance is 0)")
15
t (m1g) = 0 since lever arm is 0
MORE EXAMPLES (bar and weights suspended by the string): Find net torque around this (or any other) place x T Mg m2g m1g t (m1g) = 0 since lever arm is 0
: Find net torque around this (or any other) place. x. T. Mg. m2g. m1g. t (m1g) = 0 since lever arm is 0.")
16
t (m1g) = 0 since lever arm is 0
t (Mg ) = -Mg L/2
 = -Mg L/2.")
17
t (m1g) = 0 since lever arm is 0
x t (m1g) = 0 since lever arm is 0 t (Mg ) = -Mg L/2 t (T ) = T x
 = 0 since lever arm is 0. t (Mg ) = -Mg L/2. t (T ) = T x.")
18
t (m1g) = 0 since lever arm is 0
t (Mg ) = -Mg L/2 t (T ) = T x t (m2g ) = -m2g L All torques sum to 0: Tx = MgL/2 + m2gL So x = (MgL/2 + m2gL) / T
 = -Mg L/2. t (T ) = T x. t (m2g ) = -m2g L. All torques sum to 0: Tx = MgL/2 + m2gL So x = (MgL/2 + m2gL) / T.")
22
Moment of Inertia & Rotational KE
Textbook Sections : 1

23
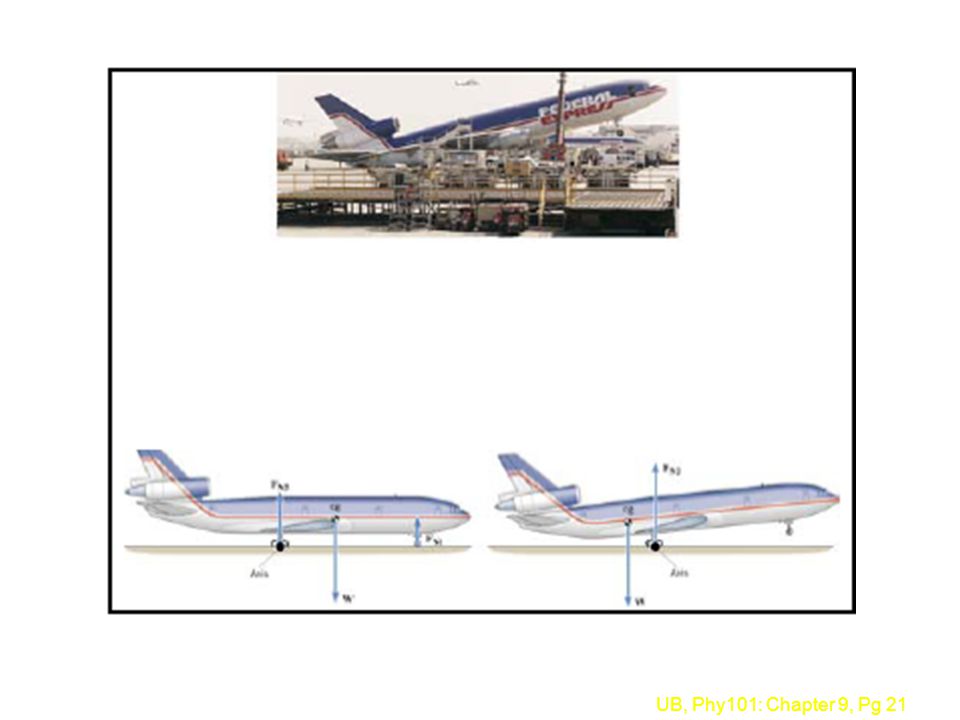
Torque and Stability Center of mass over base:
Center of mass outside of base: --> unstable Center of mass over base: --> stable

26
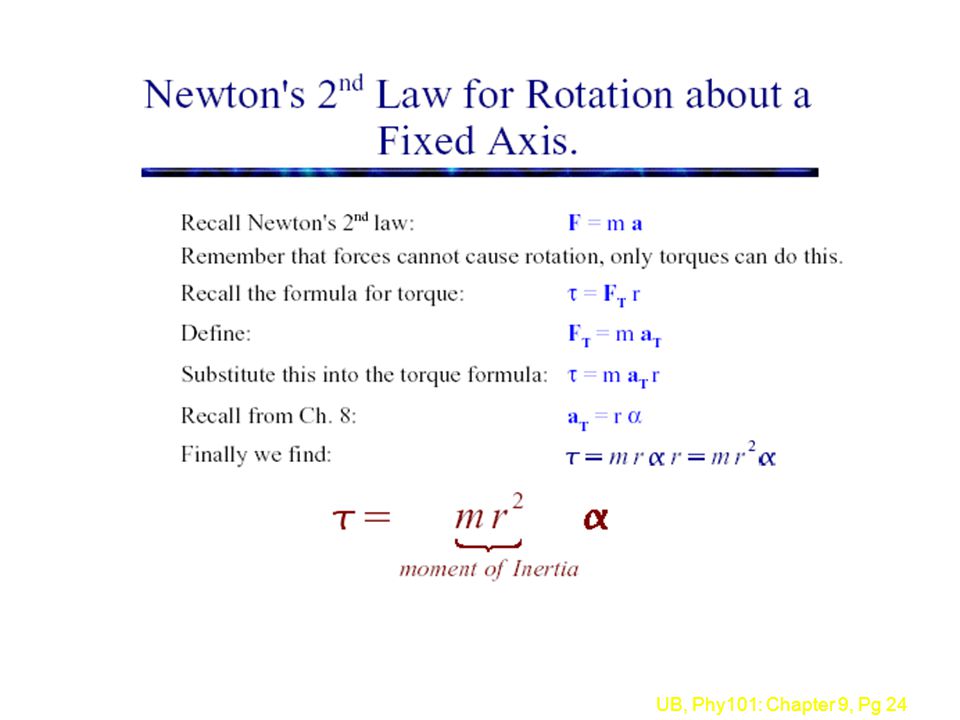
Moments of Inertia of Common Objects
Hollow cylinder or hoop about central axis I = MR2 Solid cylinder or disk about central axis I = MR2/2 Solid sphere about center I = 2MR2/5 Uniform rod about center I = ML2/12 Uniform rod about end I = ML2/3

29
Chapter 9, Preflight The picture below shows two different dumbbell shaped objects. Object A has two balls of mass m separated by a distance 2L, and object B has two balls of mass 2m separated by a distance L. Which of the objects has the largest moment of inertia for rotations around the x-axis? 1. A 2. B 3. Same m CORRECT 2m 2L L x 2m m A B I = mL2 + mL2 = 2mL2 I = 2m(L/2)2 + 2m(L/2)2 = mL2
2 + 2m(L/2)2. = mL2.")
30
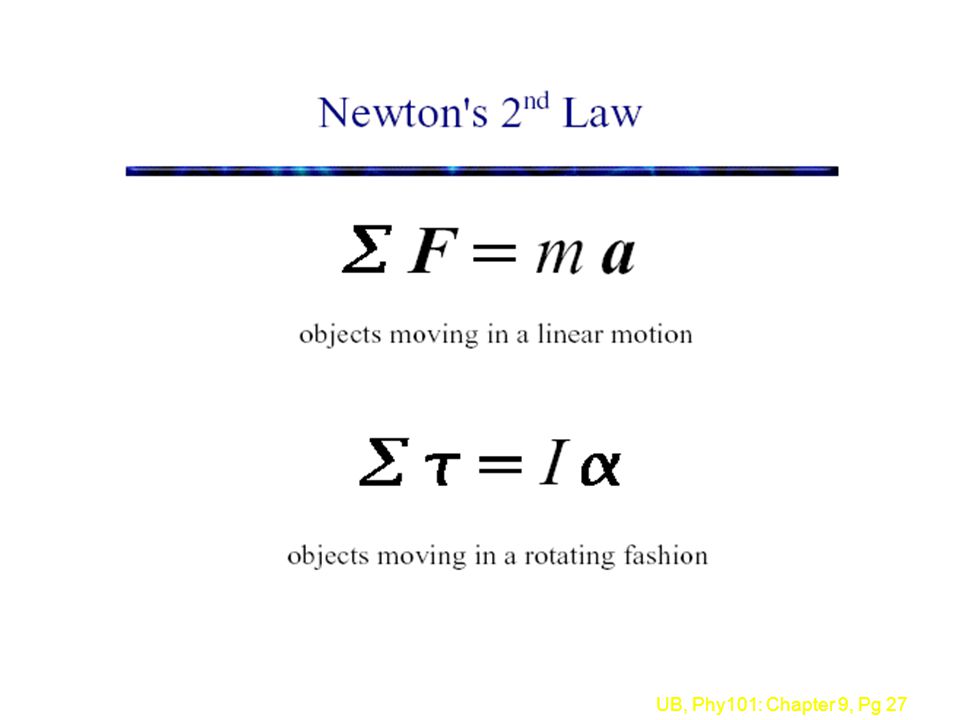
Rotational Kinetic Energy
Translational kinetic energy: KEtrnas = 1/2 MV2cm Rotational kinetic energy: KErot = 1/2 I2 Rotation plus translation: KEtotal = KEtrans + KErot = 1/2 MV2cm + 1/2 I2

31
Angular Momentum Textbook Section 9.6 1

32
Define Angular Momentum
See text: chapters 8-9 Define Angular Momentum Momentum Angular Momentum p = mV L = I conserved if Fext = 0 conserved if ext =0 Vector Vector! units: kg-m/s units: kg-m2/s See Table 8.1

33
Chapter 9, Pre-flights You are sitting on a freely rotating bar-stool with your arms stretched out and a heavy glass mug in each hand. Your friend gives you a twist and you start rotating around a vertical axis though the center of the stool. You can assume that the bearing the stool turns on is frictionless, and that there is no net external torque present once you have started spinning. You now pull your arms and hands (and mugs) close to your body.
 close to your body.")
34
Chapter 9, Preflight What happens to your angular momentum as you pull in your arms? 1. it increases 2. it decreases 3. it stays the same L1 L2 CORRECT This is like the spinning skater example in the book. Since the net external torque is zero (the movement of the arms and hands involve internal torques), the angular momentum does not change.
, the angular momentum does not change.")
35
Chapter 9, Preflight w1 w2 I1 I2 L
What happens to your angular velocity as you pull in your arms? 1. it increases 2. it decreases 3. it stays the same w1 w2 I2 I1 L CORRECT as with the skater example given in the book....as you pull your arms in toward the rotational axis, the moment of inertia decreases, and the angular velocity increases. My friends and I spent a good half hour doing this once, and I can say...based on a great deal of nausea, that the angular velocity does increase.

36
Chapter 9, Preflight w1 w2 I1 I2 L (using L = I )
What happens to your kinetic energy as you pull in your arms? 1. it increases 2. it decreases 3. it stays the same w1 w2 I2 I1 L CORRECT (using L = I ) Your angular velocity increases and moment of inertia decreases, but angular velocity is squared, so KE will increase with increasing angular velocity
 Your angular velocity increases and moment of inertia decreases, but angular velocity is squared, so KE will increase with increasing angular velocity.")
37
Spinning disks Two different spinning disks have the same angular momentum, but disk 2 has a larger moment of inertia than disk 1. Which one has the biggest kinetic energy ? (a) disk (b) disk 2
 disk 1 (b) disk 2.")
38
(using L = I ) If they have the same L, the one with the smallest I will have the biggest kinetic energy. w2 disk 2 w1 disk 1 I1 < I2

39
Preflights: Turning the bike wheel
A student sits on a barstool holding a bike wheel. The wheel is initially spinning CCW in the horizontal plane (as viewed from above). She now turns the bike wheel over. What happens? 1. She starts to spin CCW. 2. She starts to spin CW. 3. Nothing CORRECT
. She now turns the bike wheel over. What happens 1. She starts to spin CCW. 2. She starts to spin CW. 3. Nothing. CORRECT.")
40
Turning the bike wheel... Initially: LINI = LW,I
Since there is no net external torque acting on the student-stool system, angular momentum is conserved. Remenber, L has a direction as well as a magnitude! Initially: LINI = LW,I Finally: LFIN = LW,F + LS LS LW,I LW,I = LW,F + LS LW,F

41
Rotation Summary (with comparison to 1-d linear motion)
See text: chapters 8-9 Rotation Summary (with comparison to 1-d linear motion) Angular Linear See Table 8.1
 Angular Linear. See Table 8.1.")
Similar presentations





















 m from the support point of a uniform beam. What.>")


