Download presentation
Presentation is loading. Please wait.

1
PCEL4303 MICROPROCESSOR & MICRO CONTROLLERS MODULE - I (10 hours) Microprocessor Architecture: Microprocessor and Microcomputer Architecture, Pins & Signals, Register Organization, Timing & Control Module, 8085 Instruction Timing & Execution. Assembly Language Programming of 8085: Instruction set of 8085, Memory & I/O Addressing, Assembly language programming, Stack & Subroutines. Interfacing EPROM & RAM Memories: 2764 & 6264, 8085 Interrupts (Book 1: Ch.1,2,3,4 & 7)
.")
2
MODULE – II (15 hours) 8086 Microprocessor: Architectures, Pin Diagrams and Timing Diagrams: Register Organisation, Architecture, Signal Description, Physical Memory Organisations, Bus Operation, I/O Addressing Capability, Special Processor Activities, Minimum Mode System and Timings, Maximum Mode System and Timings 8086 Instruction Set and Assembler Directives: Machine Language Instruction Formats, Addressing Modes, Instruction Set, Assembler Directives and Operators Assembly Language Programming with 8086: Machine Level Programs, Machine Coding the Programs,Programming with an Assembler Special Architectural Features and Related Programming: Stack, Interrupts and Interrupt Service Routines, Interrupt Cycle,Non Maskable Interrupt, Maskable Interrupt, Interrupt Programming, Passing Parameters to Procedures, Handling Programs of Size More than 64k,MACROS, Timings and Delays Basic Peripherals and Their Interfacing with 8086: Semiconductor Memory Interfacing, Dynamic RAM Interfacing, Interfacing I/O Ports, PIO 8255] Modes of Operation of 8255
![MODULE – II (15 hours) 8086 Microprocessor: Architectures, Pin Diagrams and Timing Diagrams: Register Organisation, Architecture, Signal Description, Physical Memory Organisations, Bus Operation, I/O Addressing Capability, Special Processor Activities, Minimum Mode System and Timings, Maximum Mode System and Timings 8086 Instruction Set and Assembler Directives: Machine Language Instruction Formats, Addressing Modes, Instruction Set, Assembler Directives and Operators Assembly Language Programming with 8086: Machine Level Programs, Machine Coding the Programs,Programming with an Assembler Special Architectural Features and Related Programming: Stack, Interrupts and Interrupt Service Routines, Interrupt Cycle,Non Maskable Interrupt, Maskable Interrupt, Interrupt Programming, Passing Parameters to Procedures, Handling Programs of Size More than 64k,MACROS, Timings and Delays Basic Peripherals and Their Interfacing with 8086: Semiconductor Memory Interfacing, Dynamic RAM Interfacing, Interfacing I/O Ports, PIO 8255] Modes of Operation of 8255](http://images.slideplayer.com/12/3423061/slides/slide_2.jpg "MODULE – II (15 hours) 8086 Microprocessor: Architectures, Pin Diagrams and Timing Diagrams: Register Organisation, Architecture, Signal Description, Physical Memory Organisations, Bus Operation, I/O Addressing Capability, Special Processor Activities, Minimum Mode System and Timings, Maximum Mode System and Timings 8086 Instruction Set and Assembler Directives: Machine Language Instruction Formats, Addressing Modes, Instruction Set, Assembler Directives and Operators Assembly Language Programming with 8086: Machine Level Programs, Machine Coding the Programs,Programming with an Assembler Special Architectural Features and Related Programming: Stack, Interrupts and Interrupt Service Routines, Interrupt Cycle,Non Maskable Interrupt, Maskable Interrupt, Interrupt Programming, Passing Parameters to Procedures, Handling Programs of Size More than 64k,MACROS, Timings and Delays Basic Peripherals and Their Interfacing with 8086: Semiconductor Memory Interfacing, Dynamic RAM Interfacing, Interfacing I/O Ports, PIO 8255] Modes of Operation of 8255")
3
Interfacing Analog to Digital Data Converters, Interfacing Digital to Analog to Converters, Stepper Motor Interfacing, Special Purpose Programmable Peripheral Devices and Their Interfacing Programmable Interval Timer 8253, Programmable Interrupt Controller 8259A, The Keyboard/Display Controller 8279, Programmable Communication Interface 8251USART DMA, Floppy Disk and CRT Controllers DMA Controller 8257,DMA Transfers and Operations, Programmable DMA Interface 8237, Floppy Disk Controller 8272, CRT Controller 8275 80386 Microprocessor: Introduction, Architecture, Pins & Signals, Memory System, Registers, Memory Management, Paging Technique, Protected Mode Operation. (Book-2: Ch.1.1 to 1.9, ch.2.1 to 2.4,ch.3.1 to 3.3, ch.4.1 to 4.10,ch.5.1 to 5.8,ch.6.1 to 6.4, ch.7.1 to 7.5, ch.10.1 to 10.3, 10.7,10.9)
.")
4
MODULE –III (15 HOURS) 8051 Microcontrollers: Microcontrollers and embedded processors, Overview of the 8051 family 8051 Hardware Connection: Pin description of the 8051 8051 Assembly Language Programming: Inside the 8051, Assembly, Programming Assembling and Running an 8051 Program, The Program Counter and ROM Space in the 8051 8051 data types and Directives, PSW Register, register Banks and Stack Jump, loop, and Call Instructions: Loop and Jump Instructions, Call Instructions, Time Delay for Various 8051 chips 8051 I/O Port Programming: I/O Programming, I/O Bit Manipulation Programming, 8051 Addressing Modes: Immediate and register Addressing Modes, Accessing memory using various Addressing Modes, Bit Addresses for I/O and RAM Arithmetic & Logic Instructions and Programs: Arithmetic Instructions, Signed number concepts and Arithmetic Operations, Logic and Compare Instructions, Rotate Instruction and data Serialization, BCD, ASCII, and other Application Programs
 8051 Microcontrollers: Microcontrollers and embedded processors, Overview of the 8051 family 8051 Hardware Connection: Pin description of the Assembly Language Programming: Inside the 8051, Assembly, Programming Assembling and Running an 8051 Program, The Program Counter and ROM Space in the data types and Directives, PSW Register, register Banks and Stack Jump, loop, and Call Instructions: Loop and Jump Instructions, Call Instructions, Time Delay for Various 8051 chips 8051 I/O Port Programming: I/O Programming, I/O Bit Manipulation Programming, 8051 Addressing Modes: Immediate and register Addressing Modes, Accessing memory using various Addressing Modes, Bit Addresses for I/O and RAM Arithmetic & Logic Instructions and Programs: Arithmetic Instructions, Signed number concepts and Arithmetic Operations, Logic and Compare Instructions, Rotate Instruction and data Serialization, BCD, ASCII, and other Application Programs")
5
8051 Serial Port Programming in Assembly: Basic of Serial communication, 8051 connection to RS232, 8051 Serial port Programming in Assembly, Programming the second Serial port Interrupts Programming in Assembly: 8051 Interrupts, Programming timer Interrupts, Programming external hardware Interrupts, Programming the Serial Communication interrupt, Interrupt Priority in the 8051 ADC, DAC, and Sensor Interfacing: Parallel and Serial ADC, DAC Interfacing Sensor Interfacing and Signal Conditioning Interfacing to External Memory: Semiconductor Memory, Memory Address Decoding, Interfacing with External ROM, 8051 Data Memory space, Accessing External data Memory 8051 Interfacing with the 8255: 8255 Interfacing, Pogramming for the 8255 Motor Control: RELAY, PWM, DC, and Stepper Motors: Relays and Opto-isolations, Stepper Motor Interfacing, DC Motor Interfacing and PWM (Book-3: Ch.1.1,1.2,ch.2.1 to 2.7,ch.3.1 to 3.3,ch.4.1,4.2,ch.5.1 to 5.3,ch.6.1 to 6.5,ch.10.1 to 10.4,ch.11.1 to 11.5,ch.13.1 to 13.3,ch.14.1 to 14.4,ch.15.1,15.2,ch.17.1 to 17.3)
")
6
TEXT BOOKS 1. Ghosh & Sridhar,0000 to 8085–Introduction to Microprocessor for Scientists & Engineers, PHI 2. A.K. Roy & K.M. Bhurchandi, Advanced Microprocessor and Peripherals (Architecture, Programming & Interfacing)– TMH Publication 3. Mazidi & Mazidi, The 8051 Microcontroller & Embedded Systems– Pearson / PHI publication. REFERENCE: 1. M. Rafiqzzaman, Microprocessor – Theory & Applications. (Intel & Motorola ), PHI 2.The 8086 Microprocessor: Programming & Interfacing the PC by Keneeth J. Ayela 3. Douglas V.Hall, “Microprocessors and Interfacing: Programming and Hardware”, TMH 4. R.S. Gaonkar, Microprocessor architecture, programming & application with 8085, Penram International Publishing. (India) Pvt. Ltd. 5.W.A.Triebel and Avtar Singh, The 8088 and 8086 Microprocessors, Pearson Education 6. Barry B. B The Intel Microprocessor – (Architecture, Programming & Interfacing) by Pearson
– TMH Publication 3. Mazidi & Mazidi, The 8051 Microcontroller & Embedded Systems– Pearson / PHI publication. REFERENCE: 1. M. Rafiqzzaman, Microprocessor – Theory & Applications. (Intel & Motorola ), PHI 2.The 8086 Microprocessor: Programming & Interfacing the PC by Keneeth J. Ayela 3. Douglas V.Hall, Microprocessors and Interfacing: Programming and Hardware , TMH 4. R.S. Gaonkar, Microprocessor architecture, programming & application with 8085, Penram International Publishing. (India) Pvt. Ltd. 5.W.A.Triebel and Avtar Singh, The 8088 and 8086 Microprocessors, Pearson Education 6. Barry B. B The Intel Microprocessor – (Architecture, Programming & Interfacing) by Pearson.")
7
Microprocessor and Microcomputer Architecture Block diagram of a micro computer

8
Microcomputer A microcomputer is a small, relatively inexpensive computer with a microprocessor as its (CPU). It includes a microprocessor, memory, and input/output (I/O) facilities. Microcomputers became popular in the 1970s and 80s with the advent of increasingly powerful microprocessors. The predecessors to these computers, mainframe and minicomputers, were comparatively much larger and more expensive (though indeed present-day mainframes such as the IBM System z machines use one or more custom microprocessors as their CPUs). Many microcomputers (when equipped with a keyboard and screen for input and output) are also personal computers (in the generic sense). The abbreviation micro was common during the 1970s and 1980s, but it has now fallen out of common usage.
 facilities. Microcomputers became popular in the 1970s and 80s with the advent of increasingly powerful microprocessors. The predecessors to these computers, mainframe and minicomputers, were comparatively much larger and more expensive (though indeed present-day mainframes such as the IBM System z machines use one or more custom microprocessors as their CPUs). Many microcomputers (when equipped with a keyboard and screen for input and output) are also personal computers (in the generic sense). The abbreviation micro was common during the 1970s and 1980s, but it has now fallen out of common usage..")
9
Difference between microprocessor and microcomputer? A microprocessor is a computer chip which executes instructions. It is part of a computer. A microcomputer is, well, a computer. It has a microprocessor, memory, I/O, etc There are three difference between microprocessor and microcomputer: 1. Microprocessor is one component of the microcomputer. 2. Microcomputer is a complete computer similar to any other computer. 3. The term peripheral is used for input/output devices. Peripheral: able to be attached to and used with a computer, though not an integral part of it.

10
Difference between microprocessor & microcontroller Microcontroller is defined as a device that includes micro processor, memory, & input / output signal lines on a single chip. In Microprocessor we have to connect external RAM, ROM, I/o, Timers and interrupts by externally, where as in Microcontroller RAM, ROM,I/O, Timers serial communication all are in built in microcontroller Microprocessor is used in Higher end Industrial projects where as Microcontroller can be used for lower end projects because processor can be connected by external memory where as in controller it is fixed memory in some case we can add external memory also

11
Microprocessor The microprocessor is a programmable device that takes in numbers, performs on them arithmetic or logical operations according to the program stored in memory and then produces other numbers as a result.

12
Microprocessor architecture Inside The Microprocessor The microprocessor is made up of 3 main units. 1The Arithmetic/Logic Unit (ALU) 2The Control Unit. 3An array of registers for holding data while it is being manipulated.
 2The Control Unit. 3An array of registers for holding data while it is being manipulated..")
14
Memory Def-Memory stores information such as instructions and data in binary format (0 and 1). It provides this information to the microprocessor whenever it is needed. THEY ARE 1The registers inside the microprocessor 2Read Only Memory (ROM)used to store information that does not change. 3Random Access Memory (RAM) (also known as Read/Write Memory).used to store information supplied by the user. Such as programs and data.
used to store information that does not change. 3Random Access Memory (RAM) (also known as Read/Write Memory).used to store information supplied by the user. Such as programs and data..")
15
8085 Architecture 8-bit general purpose μp Capable of addressing 64 k of memory Has 40 pins Requires +5 v power supply Can operate with 3 MHz clock 8085 upward compatible

18
System Bus –wires connecting memory & I/O to microprocessor 1Address Bus -Unidirectional -Identifying peripheral or memory location 2Data Bus – Bidirectional – Transferring data 3Control Bus – Synchronization signals – Timing signals – Control signal

20
Intel 8085 Microprocessor Microprocessor consists of: Control unit: control microprocessor operations. ALU : performs data processing function. Registers: provide storage internal to CPU. Interrupts Internal data bus

21
The ALU 1. In addition to the arithmetic & logic circuits, the ALU includes the accumulator, which is part of every arithmetic & logic operation. 2.Also, the ALU includes a temporary register used for holding data temporarily during the execution of the operation. This temporary register is not accessible by the programmer.

22
Registers 1. General Purpose Registers B, C, D, E, H& L(8 bit registers) – Can be used singly – Or can be used as 16 bit register pairsBC, DE, HL – H & L can be used as a data pointer (holds memory address) 2.Special Purpose Registers 3.Accumulator(8 bit register)Store 8 bit data Store the result of an operation Store 8 bit data during I/O transfer
 – Can be used singly – Or can be used as 16 bit register pairsBC, DE, HL – H & L can be used as a data pointer (holds memory address) 2.Special Purpose Registers 3.Accumulator(8 bit register)Store 8 bit data Store the result of an operation Store 8 bit data during I/O transfer.")
26
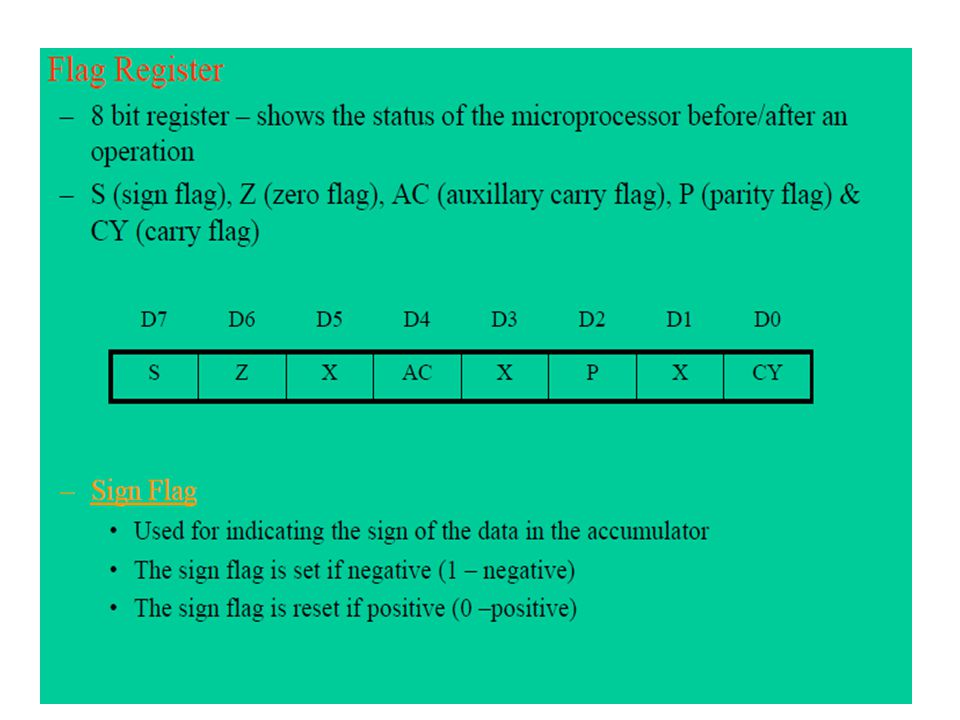
Auxillary Carry FlagIs set if there is a carry out of bit 3 Parity Flag Is set if parity is even Is cleared if parity is odd

27
The Program Counter ( PC) This is a register that is used to control the sequencing of the execution of instructions. This register always holds the address of the next instruction. Since it holds an address, it must be 16 bits wide

28
The Stack pointer The stack pointer is also a 16-bit register that is used to point into memory. The memory this register points to is a special area called the stack. The stack is an area of memory used to hold data that will be retreived soon. The stack is usually accessed in a Last In First Out (LIFO) fashion
 fashion.")
29
Instruction Register & Decoder Instruction is stored in IR after fetched by processor Decoder decodes instruction in IR Internal Clock generator 3.125 MHz internally 6.25 MHz externally

30
The Address and Data Busses The address bus has 8 signal lines A8 –A15which are unidirectional. – The other 8 address bits are multiplexed(time shared) with the 8 data bits. So, the bits AD0 – AD7are bi-directional and serve as A0 –A7and D0 – D7at the same time. – During the execution of the instruction, these lines carry the address bits during the early part, then during the late parts of the execution, they carry the 8 data bits. In order to separate the address from the data, we can use a latch to save the value before the function of the bits changes.
 with the 8 data bits. So, the bits AD0 – AD7are bi-directional and serve as A0 –A7and D0 – D7at the same time. – During the execution of the instruction, these lines carry the address bits during the early part, then during the late parts of the execution, they carry the 8 data bits. In order to separate the address from the data, we can use a latch to save the value before the function of the bits changes..")
31
De multiplexing AD7-AD0 From the above description, it becomes obvious that the AD7–AD0lines are serving a dual purpose and that they need to be de multiplexed to get all the information. The high order bits of the address remain on the bus for three clock periods. However, the low order bits remain for only one clock period and they would be lost if they are not saved externally. Also, notice that the low order bits of the address disappear when they are needed most. To make sure we have the entire address for the full three clock cycles, we will use an external latch to save the value of AD7–AD0 when it is carrying the address bits. We use the ALE signal to enable this latch.

33
De multiplexing the Bus AD7–AD0 The high order address is placed on the address bus and hold for 3 clk periods, The low order address is lost after the first clk period, this address needs to be hold however we need to use latch The address AD7 –AD0 is connected as inputs to the latch 74LS373. The ALE signal is connected to the enable (G) pin of the latch and the OC –Output control –of the latch is grounded
 pin of the latch and the OC –Output control –of the latch is grounded.")
Similar presentations