Download presentation
Presentation is loading. Please wait.

1
SPUR GEAR Tooth Loads and Mass Moment of Inertia
Lecture #25 SPUR GEAR Tooth Loads and Mass Moment of Inertia Course Name : DESIGN OF MACHINE ELEMENTS Course Number: MET 214

2
In order to develop an understanding of the factors affecting tooth size and the forces that can be transmitted by a tooth consider the diagram provided below.

3
The forces to be transmitted between a pair of gear teeth are transferred between the teeth at the point of contact. As the gears rotate, the point of contact existing between a pair of teeth changes it’s location on each tooth. Due to the shape chosen for the teeth, the direction of the forces to be transmitted between the teeth lies along the line of action, or as referred to in the diagram on the previous slide, the axis of transmission. As to be noted from the diagram provided above, the point of contact on the driven gear starts out near the top of the tooth and proceeds toward the root. In addition, it must be noted that the forces to be transmitted between the teeth are distributed along the width of the teeth. In addition, the teeth of meshing gears make contact only for a small portion of a revolution. These features of meshing gears are summarized in the figure provided in the figure on the next slide.

5
In order to analyze the loads that can be transmitted between a pair of teeth, a worst case analysis may be performed. In the case of the forces acting on a gear tooth, the most extreme situation involved with transmitting a force between teeth occurs when the force to be transmitted between the teeth is applied at the tip of one of the teeth as indicated below. The force to be transmitted acts along the line of action and may be resolved into tangential and radial components as shown in the figure on the next slide. Each force component leads to different types of stresses in the tooth. It should be noted that the figure on the next slide was copied from a different source and therefore the orientation of the load is different that what has been shown in the previous slides. Such a change in perspective should not be the source of any confusion.

7
Due to the fact that the teeth in contact are in contact only over a very small area of the tooth at any particular point of contact, the loads to be transmitted between teeth are distributed over a very small area which can lead to very high stress levels in a tooth as illustrated below. As indicated in the diagram provided on a previous slide, the repetitive nature of how the teeth of a pair of gears engage one another, the high stress levels associated with the small area of contact can lead to pitting of the gear face as indicated below. In addition, as was noted in the previous lecture, the teeth of a pair of mating gears slide relative to one another which also contributes to the wear of the gear teeth. A geometry necessary for analyzing the level of stress due to the small area of contact existing between a pair of teeth is shown on the next slide.

9
Where : 𝑊 𝑡 =𝑡𝑎𝑛𝑔𝑒𝑛𝑡𝑖𝑎𝑙 𝑓𝑜𝑟𝑐𝑒 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 𝑡𝑜 𝑔𝑒𝑎𝑟 𝑡𝑜𝑜𝑡ℎ
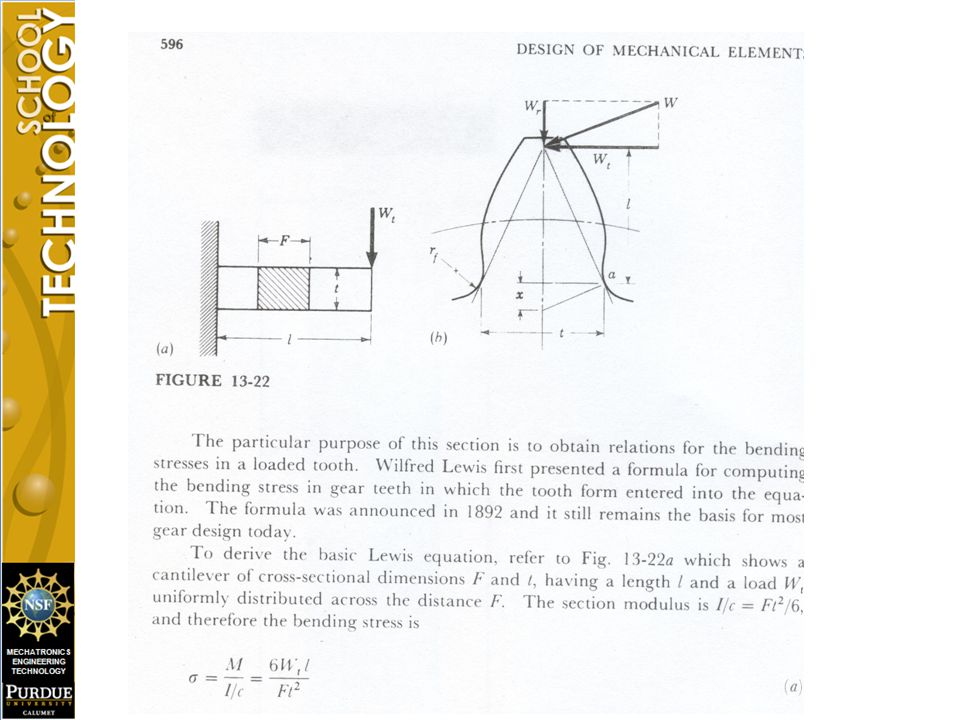
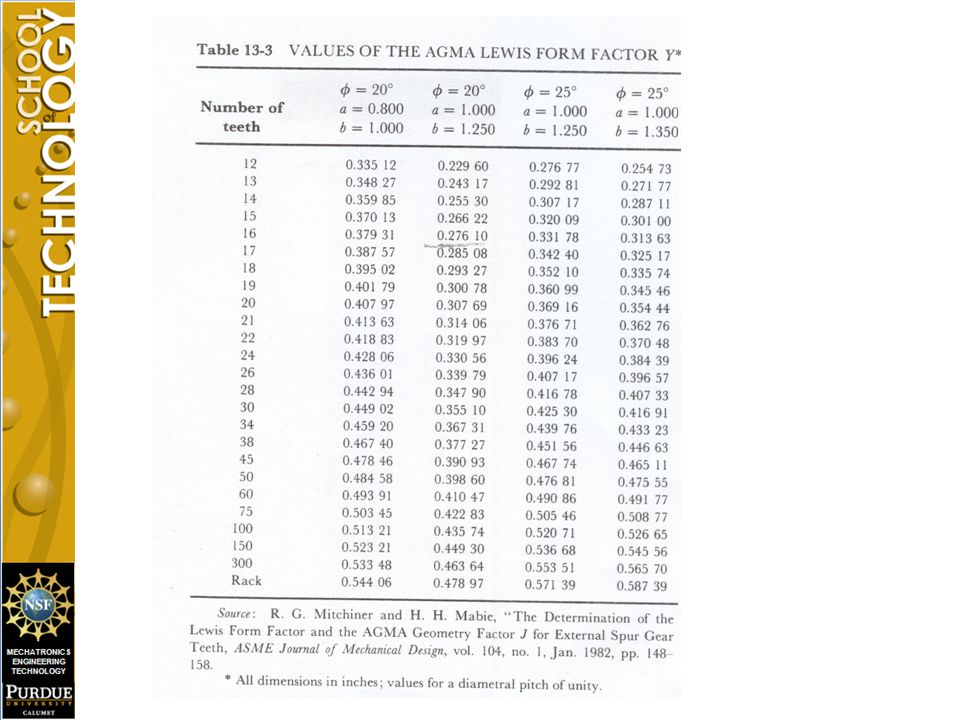
The tangential force component transmitted to a tooth produces a bending moment on the gear tooth similar to that on a cantilever beam. The resulting bending stress is maximum at the base of the tooth in the fillet that joins the involute profile to the bottom of the tooth space. Taking the detailed geometry of the tooth into account, Wilfred Lewis developed the equation for the stress at the base of the involute profile which is now called the Lewis equation. The Lewis equation is provided below: 𝜎 𝑡 = 𝑊 𝑡 𝑃 𝑑 𝐹 𝑌 Where : 𝑊 𝑡 =𝑡𝑎𝑛𝑔𝑒𝑛𝑡𝑖𝑎𝑙 𝑓𝑜𝑟𝑐𝑒 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 𝑡𝑜 𝑔𝑒𝑎𝑟 𝑡𝑜𝑜𝑡ℎ 𝑃 𝑑 =𝐷𝑖𝑎𝑚𝑒𝑡𝑟𝑎𝑙 𝑝𝑖𝑡𝑐ℎ 𝑜𝑓 𝑔𝑒𝑎𝑟 𝐹=𝑓𝑎𝑐𝑒 𝑤𝑖𝑑𝑡ℎ 𝑜𝑓 𝑔𝑒𝑎𝑟 𝑡𝑜𝑜𝑡ℎ 𝑌=𝐿𝑒𝑤𝑖𝑠 𝑓𝑜𝑟𝑚 𝑓𝑎𝑐𝑡𝑜𝑟 The Lewis form factor depends on the tooth form, the pressure angle, the diametral pitch, the number of teeth in the gear, and the point of contact existing with 𝑊 𝑡 . A derivation of the Lewis equation has been copied from the book titled “Mechanical Engineering Design” 4th edition, by Shigley and Mitchell and provided on the next few slides to acquaint the reader with a context necessary to understand the application of the Lewis equation.

17
The modification to the Lewis equation necessary to utilize the equation in practice involves many factors that are discussed in detail in books addressing the design of gears. The reader interested in the material may consult any number of texts books concerned with machine design including the book by Mott. The system shown below is referred to as a rack and pinion and can be used to convert rotational motion to linear motion and vise versa. The rack is in essence a spur gear with an infinite pitch radius so as to evolve to a shape that has zero curvature along the pitch line of the rack as shown in the figure.

18
The velocity of the rack can be related to the velocity of the pitch point of the pinion. The equation relating the linear velocity of the rack to the rotational velocity of the pinion appears below. 𝑣 𝑅 = 𝑟 𝑃 𝜔 𝑃 Where: 𝑣 𝑅 =𝑡ℎ𝑒 𝑙𝑖𝑛𝑒𝑎𝑟 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦 𝑜𝑓 𝑡ℎ𝑒 𝑟𝑎𝑐𝑘 𝑟 𝑃 =𝑟𝑎𝑑𝑖𝑢𝑠 𝑜𝑓 𝑝𝑖𝑡𝑐ℎ 𝑐𝑖𝑟𝑐𝑙𝑒 𝑜𝑓 𝑝𝑖𝑛𝑖𝑜𝑛 𝜔 𝑃 =𝑎𝑛𝑔𝑢𝑙𝑎𝑟 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦 𝑜𝑓 𝑝𝑖𝑛𝑖𝑜𝑛 𝑖𝑛 𝑟𝑎𝑑𝑠/𝑠𝑒𝑐

19
In order to relate the system level requirement pertaining to the acceleration of the rack to the force to be transmitted between gear teeth, consider the system shown below. The system contains a motor driving a pinion which in turn drives a rack which is attached to a ball slide. The ball slides offers very low resistance to linear motion. In order to relate the acceleration of the ball slide, which is the same as the acceleration of the rack since the rack is attached to the ball slide, use Newton’s law of motion to describe the acceleration of the slide.

20
𝐹 𝑆 = 𝑚 𝐵𝑆 𝑎 Where : 𝐹 𝑆 =𝑓𝑜𝑟𝑐𝑒 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 𝑡𝑜 𝑠𝑙𝑖𝑑𝑒 𝑏𝑦 𝑟𝑎𝑐𝑘 𝑡𝑜 𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑒 𝑡ℎ𝑒 𝑠𝑙𝑖𝑑𝑒 𝑚 𝐵𝑆 =𝑚𝑎𝑠𝑠 𝑜𝑓 𝑏𝑎𝑙𝑙 𝑠𝑙𝑖𝑑𝑒 𝑎𝑛𝑑 𝑎𝑙𝑙 𝑖𝑡𝑒𝑚𝑠 𝑏𝑒𝑖𝑛𝑔 𝑡𝑟𝑎𝑛𝑠𝑝𝑜𝑟𝑡𝑒𝑑 𝑜𝑛 𝑠𝑙𝑖𝑑𝑒 𝑎=𝑙𝑖𝑛𝑒𝑎𝑟 𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 𝑜𝑓 𝑠𝑙𝑖𝑑𝑒 The force generated by the rack is due to the torque the motor applies to the pinion and the fact that the rack and pinion transforms the torque into a force applied to the rack. The equation describing this behavior of the rack and pinion is provided below. 𝑇 𝑃 = 𝐹 𝑆 𝑟 𝑃 Where 𝑇 𝑃 =𝑡𝑜𝑟𝑞𝑢𝑒 𝑜𝑓 𝑝𝑖𝑛𝑖𝑜𝑛 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟𝑟𝑒𝑑 𝑡𝑜 𝑠𝑙𝑖𝑑𝑒 Substituting the expression above for 𝐹 𝑆 and recalling that linear acceleration is related to angular acceleration produces the following expression for the torque of the pinion. 𝑇 𝑃 = 𝑚 𝐵𝑆 𝑎 𝑟 𝑃 = 𝑚 𝐵𝑆 𝑟 𝑃 2 𝛼 𝑃 Where: 𝛼 𝑃 =𝑎𝑛𝑔𝑢𝑙𝑎𝑟 𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 𝑜𝑓 𝑝𝑖𝑛𝑖𝑜𝑛 In order to determine the torque required from the motor to accelerate the slide with an acceleration of a, write Newton’s 2nd law for rotational systems as shown below.

21
𝑇 = 𝐽 𝑚𝑆 𝛼 𝑃 Where 𝑇 =𝑠𝑢𝑚𝑚𝑎𝑡𝑖𝑜𝑛 𝑜𝑓 𝑡𝑜𝑟𝑞𝑢𝑒𝑠 𝑎𝑐𝑡𝑖𝑛𝑔 𝑜𝑛 𝑠ℎ𝑎𝑓𝑡 𝑜𝑓 𝑝𝑖𝑛𝑖𝑜𝑛 𝐽 𝑚𝑆 =𝑚𝑎𝑠𝑠 𝑚𝑜𝑚𝑒𝑛𝑡 𝑜𝑓 𝑖𝑛𝑒𝑟𝑡𝑖𝑎 𝑜𝑓 𝑠ℎ𝑎𝑓𝑡 𝑜𝑓 𝑚𝑜𝑡𝑜𝑟 𝑎𝑛𝑑 𝑝𝑖𝑛𝑖𝑜𝑛 𝑇 = 𝑇 𝑚 − 𝑇 𝑃 Where 𝑇 𝑚 =𝑡𝑜𝑟𝑞𝑢𝑒 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 𝑡𝑜 𝑠ℎ𝑎𝑓𝑡 𝑏𝑦 𝑚𝑜𝑡𝑜𝑟 Rearranging terms 𝑇 𝑚 = 𝐽 𝑚𝑆 𝛼 𝑃 + 𝑇 𝑃 Substituting for 𝑇 𝑃 yields an expression for motor torque and how the mass of the slide and the radius of the pinion effect motor torque. 𝑇 𝑚 = 𝐽 𝑚𝑆 𝛼 𝑃 + 𝑚 𝑏𝑠 𝑟 𝑃 2 𝛼 𝑃 The expression in the above equation includes the influence of acceleration the ball slide in terms of angular measures. In essence, the linear motion characteristics have been transformed into angular measures so a concise description of the torque required from the motor can be obtained. In order to further organize the information concerning the torque requirements of the motor, note that the equation can be simplified further.

22
𝑇 𝑀 = 𝐽 𝑚𝑠 + 𝑚 𝐵𝑆 𝑟 𝑃 2 𝛼 𝑃 𝑇 𝑚 = 𝐽 𝑒𝑞 𝛼 𝑃 Where 𝐽 𝑒𝑞 = 𝐽 𝑠 + 𝑚 𝐵𝑆 𝑟 𝑃 2 In essence, the mass of the slide and the radius of the pinion have been combined in a manner that allows the combination to be treated as a mass moment of inertia term that can be combined with other mass moment of inertia terms in order to simplify the process of determining the amount of motor torque required to accelerate the ball slide where the acceleration requirements of the ball slide have been transformed into an angular acceleration requirement . Although no friction forces were assumed to be acting on the slide in the analysis presented, forces that would be associated with slide motion in certain applications could be included in the analysis. Such examples include the use of a rack to move a slide on a lathe. The machining operations being performed on the lathe would result in reaction forces being applied to the slide that would resists the motion of the slide. The next few lectures will be dedicated to expanding on the transformations necessary to determine equivalent mass moment of inertia terms and/or how to reflect force terms in addition to mass terms back to a motor in order to streamline the process of motor selection.

Similar presentations