Download presentation
1
Neural-Network-Based Fuzzy Logical Control and Decision System 主講人 虞台文

2
Content Introduction Basic Structure of Fuzzy Systems Connectionist Fuzzy Logic Control and Decision Systems Hybrid Learning Algorithm Example: Fuzzy Control of Unmanned Vehicle

3
Neural-Network-Based Fuzzy Logical Control and Decision System Introduction

4
Reference Chin-Teng Lin and C. S. George Lee, “Neural-network-based fuzzy logic control and decision system,” IEEE Transactions on Computers, Volume: 40, Issue: 12, Dec. 1991, Pages:1320 – 1336.

5
Neural-Network & Fuzzy-Logic Systems Neural-Network Systems – Highly connected PE’s (distributive representation) – Learning capability (Learning from examples) – Learning result is hardly interpretable – Efficient in pattern matching, but inefficient in computation Fuzzy-Logic Systems – Inference based on human readable fuzzy rules – Linguistic-variable based fuzzy rules – Fuzzy rules from experienced engineers – Fuzzification before inference – Inference using compositional rule – Defuzzification before output
 – Learning capability (Learning from examples) – Learning result is hardly interpretable – Efficient in pattern matching, but inefficient in computation Fuzzy-Logic Systems – Inference based on human readable fuzzy rules – Linguistic-variable based fuzzy rules – Fuzzy rules from experienced engineers – Fuzzification before inference – Inference using compositional rule – Defuzzification before output")
6
Neural-Network & Fuzzy-Logic Systems Neural-Network Systems – Highly connected PE’s (distributive representation) – Learning capability (Learning from examples) – Learning result is hardly interpretable – Efficient in pattern matching, but inefficient in computation Fuzzy-Logic Systems – Inference based on human readable fuzzy rules – Linguistic-variable based fuzzy rules – Fuzzy rules from experienced engineers – Fuzzification before inference – Inference using compositional rule – Defuzzification before output The construction of fuzzy rule base & the determination of membership functions are subjective. Back-propagation learning algorithm is efficient if the appropriate network structure is used. However, the determination of the appropriate network structure is difficult. Back-propagation learning algorithm is efficient if the appropriate network structure is used. However, the determination of the appropriate network structure is difficult.

7
Neuro-Fuzzy Systems Neural Network + Fuzzy Logic Good for learning. Not good for human to interpret its internal representation. Supervised leaning Unsupervised learning Reinforcement learning Human reasoning scheme. Fuzzy rules and membership functions are subjective. Readable Fuzzy rules Interpretable

8
Neuro-Fuzzy Systems Neural Network + Fuzzy Logic Good for learning. Not good for human to interpret its internal representation. Supervised leaning Unsupervised learning Reinforcement learning Human reasoning scheme. Fuzzy rules and membership functions are subjective. Readable Fuzzy rules Interpretable A neuro-fuzzy system is a fuzzy system that uses a learning algorithm derived from or inspired by neural network theory to determine its parameters by processing data samples.

9
Neuro-Fuzzy Systems Neural Network + Fuzzy Logic A neuro-fuzzy system is a fuzzy system that uses a learning algorithm derived from or inspired by neural network theory to determine its parameters by processing data samples. fuzzy sets and fuzzy rules

10
Neural-Network-Based Fuzzy Logical Control and Decision System Basic Structure of Fuzzy Systems

11
X Y Fuzzifier Inference Engine Defuzzifier Fuzzy Knowledge Base

12
Fuzzifier X Y Inference Engine Defuzzifier Fuzzy Knowledge Base Fuzzifier Converts the crisp input to a linguistic variable using the membership functions stored in the fuzzy knowledge base.

13
Inference Engine X Y Fuzzifier Inference Engine Defuzzifier Fuzzy Knowledge Base Inference Engine Using If-Then type fuzzy rules converts the fuzzy input to the fuzzy output.

14
Defuzzifier X Y Fuzzifier Inference Engine Defuzzifier Fuzzy Knowledge Base Converts the fuzzy output of the inference engine to crisp using membership functions analogous to the ones used by the fuzzifier. Defuzzifier

15
Fuzzy Knowledge Base X Y Fuzzifier Inference Engine Defuzzifier Information storage for 1.Linguistic variables definitions. 2.Fuzzy rules.

16
Input/Output Vectors X Y Fuzzifier Inference Engine Defuzzifier Fuzzy Knowledge Base

17
Fuzzy Rules MIMO: multiinput and multioutput.

18
Fuzzy Rules MIMO: multiinput and multioutput. MIMO MISO

19
Fuzzy Reasoning X Deffuzzifier y

20
Fuzzy Reasoning X Deffuzzifier y

21
Rule Firing Strengths 1 = 2 = 3 = 4 = X Deffuzzifier y

22
X y Fuzzy Sets of Decisions 1 = 2 = 3 = 4 = 1 1 2 2 3 3 4 4

23
X Deffuzzifier y Fuzzy Sets of Decisions 1 = 2 = 3 = 4 = 1 1 2 2 3 3 4 4

24
X Deffuzzifier y Fuzzy Sets of Decisions

25
X Deffuzzifier y Defuzzification Decision Output Deffuzzifier

26
General Model of Fuzzy Controller and Decision Making System

27
Neural-Network-Based Fuzzy Logical Control and Decision System Connectionist Fuzzy Logic Control and Decision Systems

28
The Architecture Layer 1 input linguistic nodes Layer 2 input term nodes Layer 3 rule nodes Layer 4 Output term node Layer 5 output linguistic nodes

29
The Architecture Layer 1 input linguistic nodes Layer 2 input term nodes Layer 3 rule nodes Layer 4 Output term node Layer 5 output linguistic nodes Fuzzifier Inference Engine Defuzzifier

30
The Architecture Layer 1 input linguistic nodes Layer 2 input term nodes Layer 3 rule nodes Layer 4 Output term node Layer 5 output linguistic nodes Fully Connected Fully Connected

31
The Architecture Layer 1 input linguistic nodes Layer 2 input term nodes Layer 3 rule nodes Layer 4 Output term node Layer 5 output linguistic nodes antecedent consquent

32
Basic Structure of Neurons Layer k

33
Layer 1 Neurons

34
Layer 2 Neurons center width

35
Layer 3 Neurons

36
Layer 4 Neurons Down-Up Mode {0, 1}

37
Layer 4 Neurons Up-Down Mode center width

38
Layer 5 Neurons Up-Down Mode

39
Layer 5 Neurons Down-Up Mode

40
Neural-Network-Based Fuzzy Logical Control and Decision System Hybrid Learning Algorithm

41
Initialization rule nodes

42
Initialization rule nodes

43
Two-Phase Learning Scheme Self-Organized Learning Phase – Unsupervised learning of the membership functions. – Unsupervised learning of the rulebase. Supervised Learning Phase – Error back-propagation for optimization of the membership functions.

44
Unsupervised Learning of the Membership Functions Step 1: First estimation of the membership function’s centers using Kohonen’s learning rule. Step 2: The widths of the membership functions are estimated from the widths using a simple mathematical formula. Note that the membership functions calculated are far from ideal but this is only a pre-estimation in order to create the rulebase.

45
Unsupervised Learning of the Membership Functions Step 1: First estimation of the membership function’s centers using Kohonen’s learning rule. Step 2: The widths of the membership functions are estimated from the widths using a simple mathematical formula. Note that the membership functions calculated are far from ideal but this is only a pre-estimation in order to create the rulebase. Winner-take-all:

46
Unsupervised Learning of the Membership Functions Step 1: First estimation of the membership function’s centers using Kohonen’s learning rule. Step 2: The widths of the membership functions are estimated from the widths using a simple mathematical formula. Note that the membership functions calculated are far from ideal but this is only a pre-estimation in order to create the rulebase. N-nearest-neighbors Minimize 1-nearest-neighbors r : overlay parameter

47
Unsupervised Learning of the Rulebase Method: Competitive Learning + Learn-if-win Deletion of rule nodes Combination of rule nodes Learn-if-win:

48
Example of Combination of Rule Nodes

49
Supervise Learning Phase Error back-propagation for optimization of the membership functions. Learning Rate

50
Supervise Learning Phase Error back-propagation for optimization of the membership functions. w How w effects E ? How w effects f ? How f effects E ?

51
Supervise Learning Phase Error back-propagation for optimization of the membership functions. w How f effects E ? How f effects a ? How a effects E ? How w effects E ? How w effects f ?

52
Supervise Learning Phase Error back-propagation for optimization of the membership functions. w error backpropagation

53
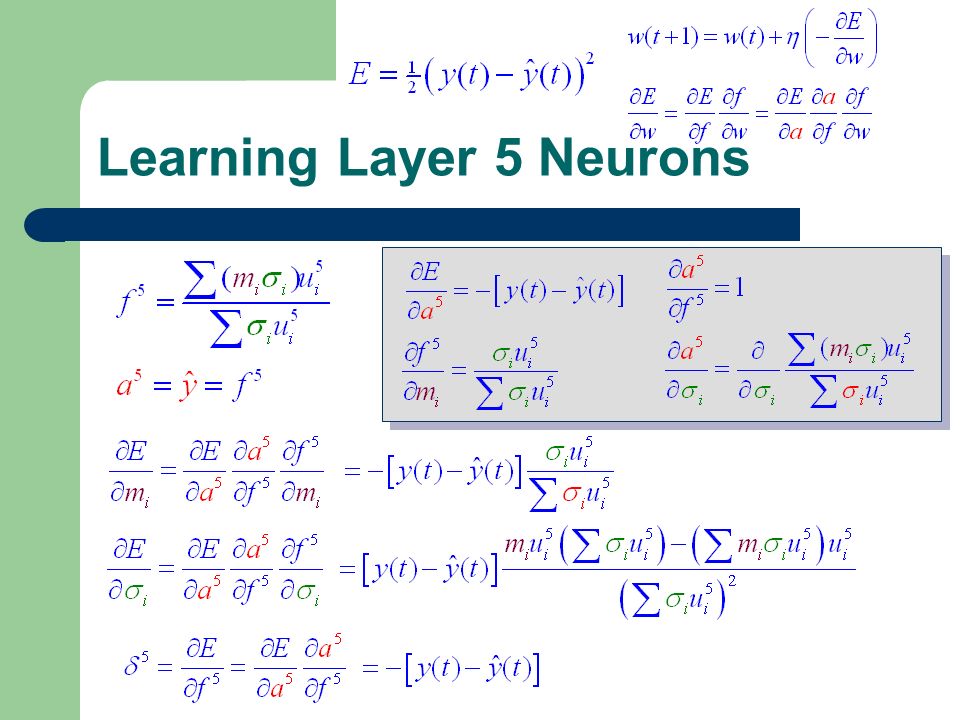
Learning Layer 5 Neurons

55
Learning Layer 4 Neurons No need to learn. Error back-propagation only: 55 1 or 0

56
Learning Layer 4 Neurons Error back-propagation only: 55 1 or 0

57
Learning Layer 3 Neurons No need to learn. Error back-propagation only: 1 1

58
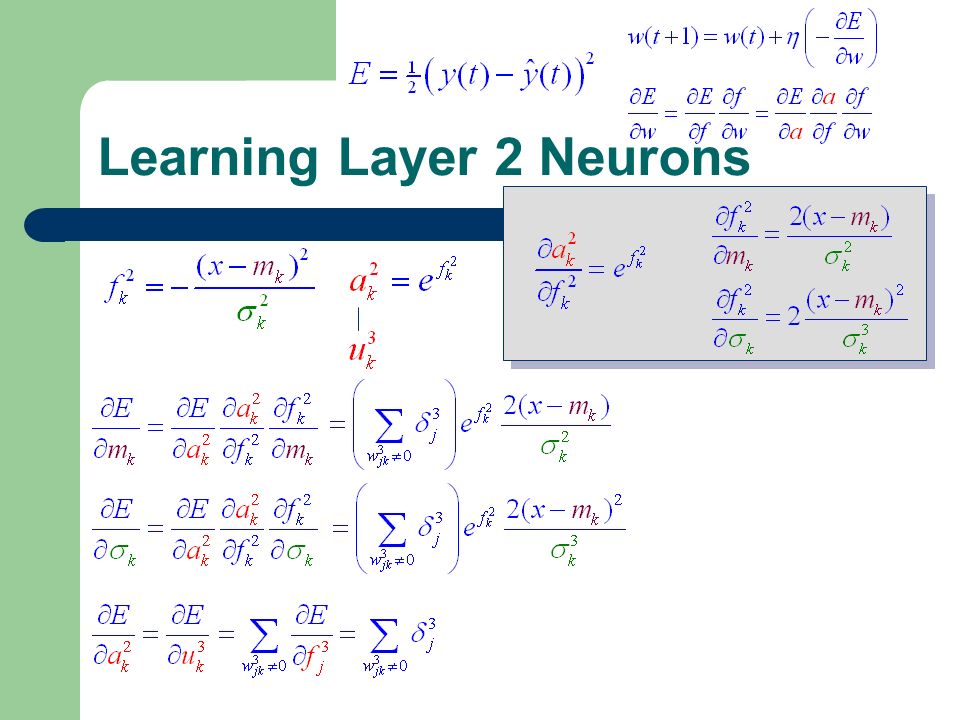
Learning Layer 2 Neurons

60
Neural-Network-Based Fuzzy Logical Control and Decision System Example: Fuzzy Control of Unmanned Vehicle

61
The Fuzzy Car

62
The Fuzzy System Learned

63
The Fuzzy Rules Learned

64
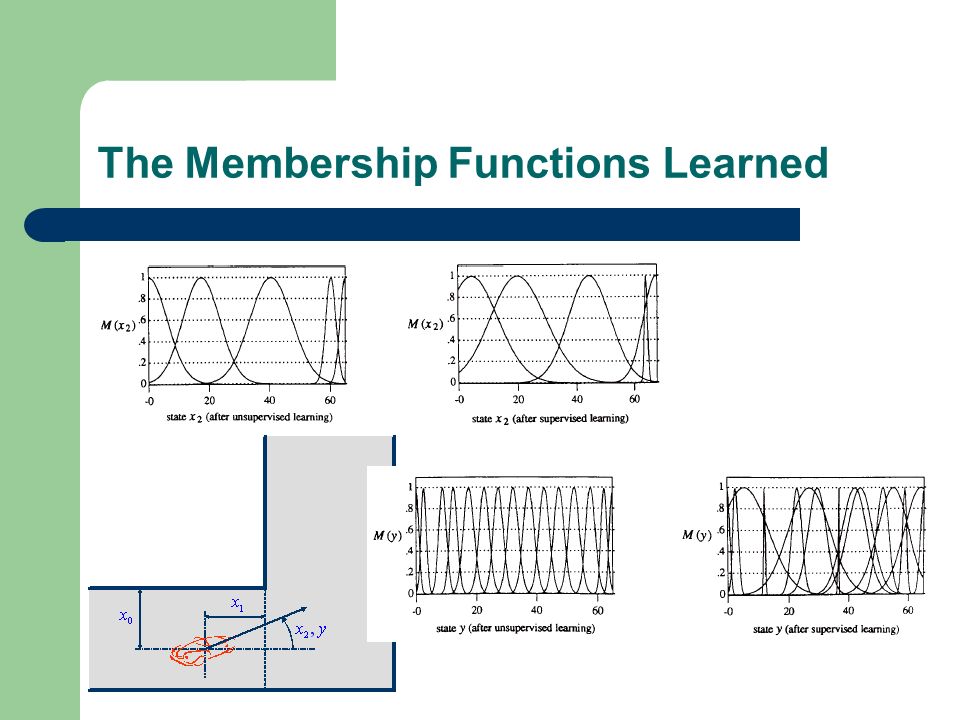
The Membership Functions Learned

66
Learning Curves Learning rate 0.15 Error tolerance 0.01

67
Simulation


















 logic that has been extended to handle the concept.>")
.>")

