Download presentation
Presentation is loading. Please wait.

1
ECE 477 Design Review Group 11 Fall 2005

2
Outline Project overviewProject overview Project-specific success criteriaProject-specific success criteria Block diagramBlock diagram Component selection rationaleComponent selection rationale Packaging designPackaging design Schematic and theory of operationSchematic and theory of operation Preliminary PCB layoutPreliminary PCB layout Software design/development statusSoftware design/development status Project completion timelineProject completion timeline Questions / discussionQuestions / discussion

3
Project Overview Receives video input from a black and white camera, and turn signal status from a tilt sensor.Receives video input from a black and white camera, and turn signal status from a tilt sensor. An analog to digital converter filters the video and converts it to digital video for the micro.An analog to digital converter filters the video and converts it to digital video for the micro. Microcontroller processes the image and tilt sensor data to determine the vehicle position within the lane and produce any appropriate outputs.Microcontroller processes the image and tilt sensor data to determine the vehicle position within the lane and produce any appropriate outputs. A row of 11 LEDs will show the location of the car.A row of 11 LEDs will show the location of the car. Buzzer will sound if the car is drifting into another lane without the turn signal activated.Buzzer will sound if the car is drifting into another lane without the turn signal activated.

4
Project-Specific Success Criteria 1. 1.An ability to provide visual feedback of the lateral position of the car within the lane. 2. 2.An ability to operate without user input. 3. 3.An ability to warn audibly when leaving the lane. 4. 4.An ability to warn audibly when an obstacle is detected in the vehicle’s path. 5. 5.An ability to detect when the driver triggers the turn signal.

5
Block Diagram

6
Component Selection Rationale Microcontroller The microprocessor’s selection was limited to DSP chips because they have the special instructions for doing intensive operations like multiply and accumulate very quickly. It also needed to have the built-in video support because of the difficult nature of interpreting the video data stream. Design constraints permit processing of 320x240 BW video at 30fps. Spec TI--DM642-500 Analog–BF532 Design Constraint MIPS4000800138 RAM (kB)32+2568476.8 Video SupportYesYesYes Packaging Only BGALQFP No BGA Price$72.38$15.20$30 The Analog-BF532 was chosen because it met all the specs.
 Video SupportYesYesYes Packaging Only BGALQFP No BGA Price$72.38$15.20$30 The Analog-BF532 was chosen because it met all the specs..")
7
Component Selection Rationale Camera The most important camera constraint was the data format although performance and size were also important. Spec PVBULLET-WP Clover CM720 Design Constraint Sensor TypeCCDCCDCCD Output TypeNTSCNTSCNTSC Resolution420 lines420 lines240+ lines Size (cm) 7.6x3.8x3.83.7x3.4x2.9Small Input Voltage9V12V<= 12V Price$58.38$51.90$70.00 Because both cameras meet the baseline specs, the smaller component, the Clover CM720, was selected.
 7.6x3.8x3.83.7x3.4x2.9Small Input Voltage9V12V<= 12V Price$58.38$51.90$70.00 Because both cameras meet the baseline specs, the smaller component, the Clover CM720, was selected..")
8
Packaging Design Packaging carefully designed to protect delicate parts without sacrificing operation Structure intended to be simple, modular, and easily adjustable, not blocking the driver’s view and movement Unit will be powered by the cigarette jack from the car. A central box will do all processing and contain the output devices. The camera and tilt sensor will be external inputs which will connect to jacks in the back of the box.

9
Power Regulator

10
Serial Debugging and Level Converter

11
Boot EEPROM

12
LED Programmable Output

13
Analog to Digital Converter

14
Microprocessor

15
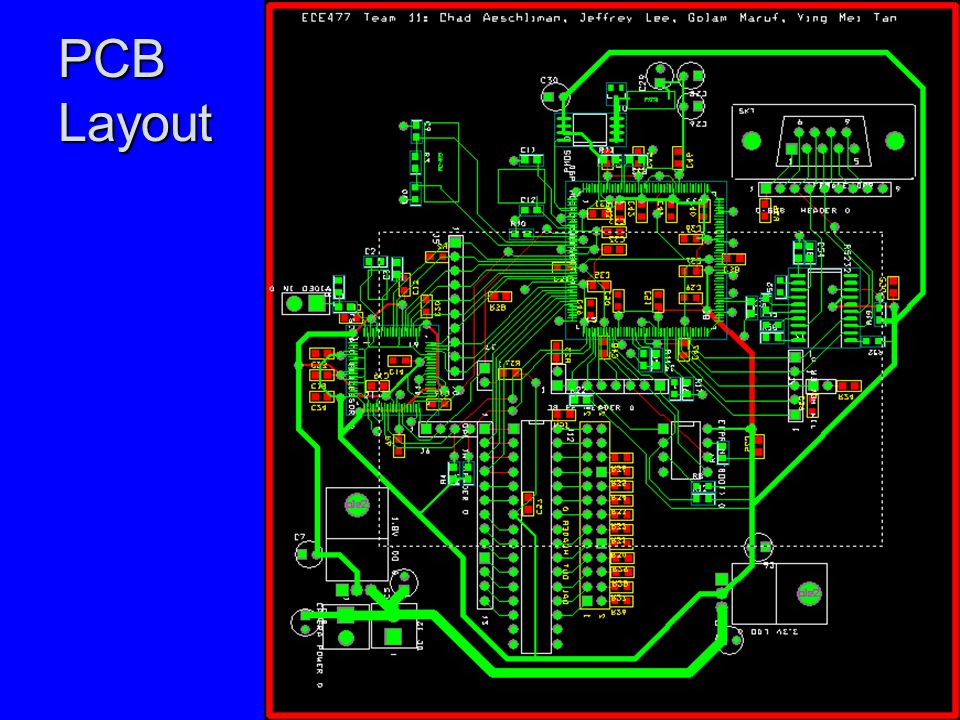
PCB Layout

17
Software Design and Development Status The lane position algorithm is 90% functional in Matlab.The lane position algorithm is 90% functional in Matlab. –It uses the cross-correlation between current image and the “average” image. Software implemented in microprocessor will be based on simple poling loop consisting of:Software implemented in microprocessor will be based on simple poling loop consisting of: –Input image –Check tilt sensor –Perform cross-correlation to get lane position –If tilt sensor does not indicate a turn, check if lane position is out of bounds –Add new data to data history and check if driver is impaired –Update outputs based on new position/any warnings –Update average image with new image according to the following equation: Average = 0.97*Average + 0.03*New

18
Project Completion Timeline

19
Questions ?

Similar presentations




, Matt Cozza (not pictured), Joe Waugh (not pictured), Evan Zelkowitz (not pictured)>")














