Download presentation
Presentation is loading. Please wait.

1
ECE 477 Design Review Team 13 Spring 2006 Elmer Chao (not pictured), Matt Cozza (not pictured), Joe Waugh (not pictured), Evan Zelkowitz (not pictured)
, Matt Cozza (not pictured), Joe Waugh (not pictured), Evan Zelkowitz (not pictured)")
2
Outline Project overviewProject overview Project-specific success criteriaProject-specific success criteria Block diagramBlock diagram Component selection rationaleComponent selection rationale Packaging designPackaging design Schematic and theory of operationSchematic and theory of operation PCB layoutPCB layout Software design/development statusSoftware design/development status Project completion timelineProject completion timeline Questions / discussionQuestions / discussion

3
Project Overview Our team is designing a telemetry board for the Purdue Solar Racing team Interfaces with Motor Controller, Battery Pack, Packet Modem, PowerPoint trackers, and Driver Interface System.Interfaces with Motor Controller, Battery Pack, Packet Modem, PowerPoint trackers, and Driver Interface System. Gathers temperature, acceleration, and GPS data.Gathers temperature, acceleration, and GPS data. Transfers information out to Driver Interface System and Packet Modem.Transfers information out to Driver Interface System and Packet Modem.

4
Project-Specific Success Criteria An ability to monitor vehicle temperature (and generate an alert message if out-of-range).An ability to monitor vehicle temperature (and generate an alert message if out-of-range). An ability to log (time stamp) vehicle acceleration data.An ability to log (time stamp) vehicle acceleration data. An ability to function as the local CAN bus master.An ability to function as the local CAN bus master. An ability to generate vehicle status reports (and transmit them over a packet modem).An ability to generate vehicle status reports (and transmit them over a packet modem). An ability to bridge data communication between the CAN bus and multiple RS-232 ports.An ability to bridge data communication between the CAN bus and multiple RS-232 ports.
 vehicle acceleration data.An ability to log (time stamp) vehicle acceleration data. An ability to function as the local CAN bus master.An ability to function as the local CAN bus master. An ability to generate vehicle status reports (and transmit them over a packet modem).An ability to generate vehicle status reports (and transmit them over a packet modem). An ability to bridge data communication between the CAN bus and multiple RS-232 ports.An ability to bridge data communication between the CAN bus and multiple RS-232 ports..")
5
µP (PIC18F) Temperature Sensor CAN (x4) Motor ControllerBattery SystemPacket Modem Single-Axis Accelerometer (Y) 12v to 5v SPI-to-UART (SCI16IS752) Quad RS-232 Transceiver (MAX238) SPI-to-UART ( SCI16IS752 ) RS-232 Unused I/O Connector CAN A/D I/O MTE ICP Flash GPS Single-Axis Accelerometer (Z) Single-Axis Accelerometer (X) A/D SPI Block Diagram PowerPoint Trackers Driver Interface System Not part of Telemetry System CAN Bus
 Temperature Sensor CAN (x4) Motor ControllerBattery SystemPacket Modem Single-Axis Accelerometer (Y) 12v to 5v SPI-to-UART (SCI16IS752) Quad RS-232 Transceiver (MAX238) SPI-to-UART ( SCI16IS752 ) RS-232 Unused I/O Connector CAN A/D I/O MTE ICP Flash GPS Single-Axis Accelerometer (Z) Single-Axis Accelerometer (X) A/D SPI Block Diagram PowerPoint Trackers Driver Interface System Not part of Telemetry System CAN Bus")
6
Component Selection Rationale Microcontroller – PIC18F4680Microcontroller – PIC18F4680 SPI to UART - SC16IS752 / MAX238SPI to UART - SC16IS752 / MAX238 Power – MAX1684 / LT1121Power – MAX1684 / LT1121 Accelerometers – 1260D/2260DAccelerometers – 1260D/2260D GPS Unit – Garmin GPS18GPS Unit – Garmin GPS18

7
Packaging Design Size not a constraintSize not a constraint Needed to be lightweightNeeded to be lightweight Actual Dimensions: 5in x 7in x 3inActual Dimensions: 5in x 7in x 3in Material: ABS PlasticMaterial: ABS Plastic

8
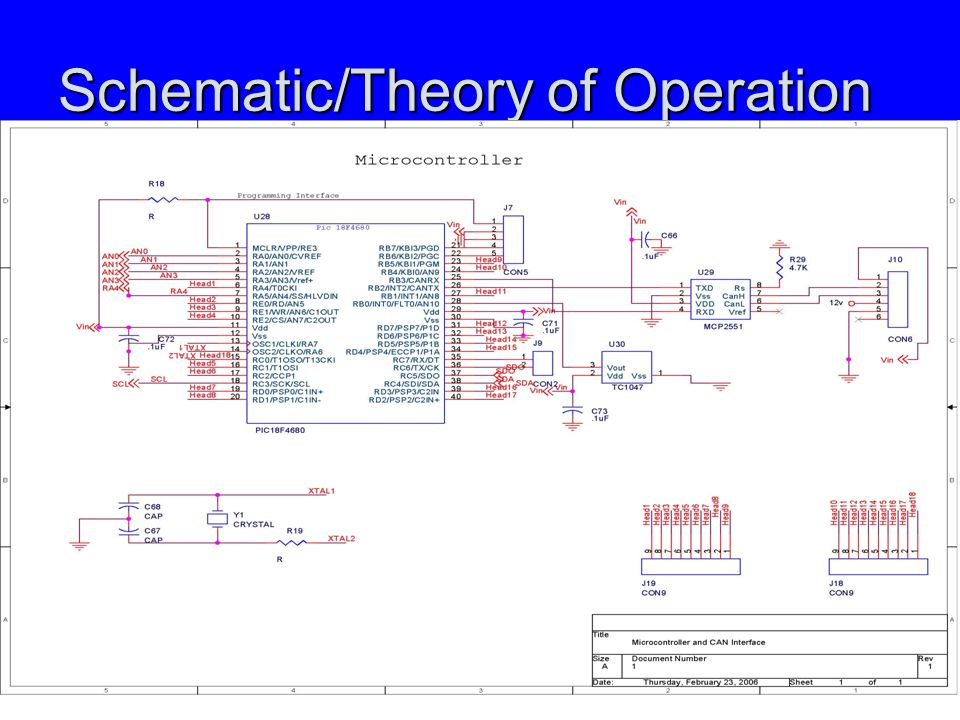
Schematic/Theory of Operation

12
PCB Layout Top CopperBottom CopperNo Pours 1. Analog 2. Power

13
PCB Layout – Power Regulators 1. 3.3v output capacitor close to regulator 2. 5v output capacitor and inductor close to regulator 3. 5v input capacitor close to regulator 4. Power layout entirely single sided, with ground plane underneath

14
PCB Layout – Analog Circuits 1. Single sided analog circuit layout, with ground plane underneath 2. Analog circuitry separated from other modules

15
PCB Layout – UART Circuits 1. Crystals and bypass caps placed as closely as possible to chips

16
PCB Layout - Processor 1. Crystals and bypass caps placed underneath the processor

17
Software Design/Development Status Started work with MPLab simulatorStarted work with MPLab simulator Laying out ground rules for CAN protocolLaying out ground rules for CAN protocol –Using OpenCAN implementation from MicroChip. High Level protocol that is easily expanded.

18
Project Completion Timeline PCB finalized this weekPCB finalized this week Software design considerations and planning to be completed by end of spring breakSoftware design considerations and planning to be completed by end of spring break First phase development of software needs to be completed by two weeks after spring breakFirst phase development of software needs to be completed by two weeks after spring break

19
Questions / Discussion

Similar presentations