Download presentation
Presentation is loading. Please wait.

1
Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl Shear banding in granular materials Stefan Luding PART/DCT, TUDelft, NL Thanks to: M. Lätzel, M.-K. Müller (Stuttgart), R. P. Behringer, J. Geng, D. Howell (Duke), M. van Hecke, D. Fenistein (Leiden)
, R. P. Behringer, J. Geng, D. Howell (Duke), M. van Hecke, D. Fenistein (Leiden).")
2
Introduction Results DEM Micro-Macro (global) Micro-Macro (local) Outlook - Anisotropy - Rotations Single particle Contacts Many particle simulation Continuum Theory Contents
 Micro-Macro (local) Outlook - Anisotropy - Rotations Single particle Contacts Many particle simulation Continuum Theory Contents")
3
Single particle Contacts Many particle simulation Continuum Theory Contents E x p e r i m e n t s Introduction Results DEM Micro-Macro (global) Micro-Macro (local) Outlook - Anisotropy - Rotations
 Micro-Macro (local) Outlook - Anisotropy - Rotations")
4
Material behavior of granular media Non-Newtonian Flow behavior under slow shear inhomogeneityrotations Yield-surface Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl

5
Material behavior of granular media 3D 3-dimensional modeling of shear and sound propagation Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl P-wave shape and speed Universal shear zones

6
Sound propagation in granular media 3-dimensional modeling of sound propagation Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl P-wave shape and speed

7
Applications Granular media (powder, sand, …) Colloidal systems (+fluid) Atomistic systems in confined geometries Many particle systems (traffic, pedestrians) Industrial scale applications ?
 Colloidal systems (+fluid) Atomistic systems in confined geometries Many particle systems (traffic, pedestrians) Industrial scale applications")
8
Why ? `Many particle simulations work for small systems only (10 4 - 10 6 ) Industrial scale applications rely on FEM FEM relies on continuum mechanics + constitutive relations `Micro-macro can provide those ! Homogenization/Averaging
 Industrial scale applications rely on FEM FEM relies on continuum mechanics + constitutive relations `Micro-macro can provide those . Homogenization/Averaging.")
9
Introduction Results DEM Contacts Many particle simulation Contents

10
Equations of motion Overlap Forces and torques: Normal Contacts Many particle simulation Discrete particle model

11
Contact force measurement (PIA)
")
12
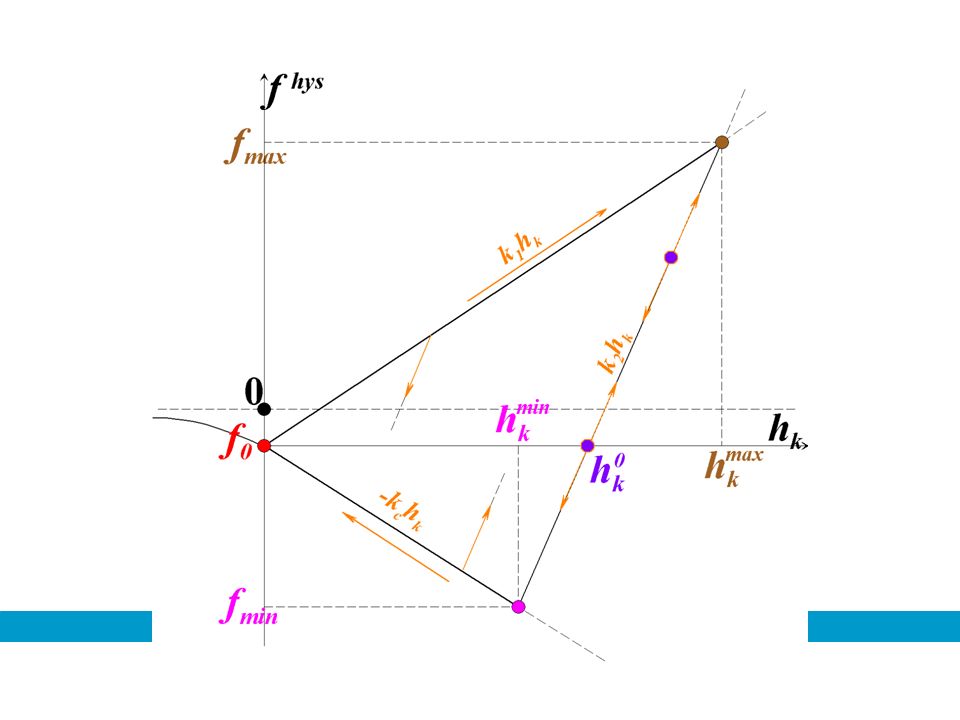
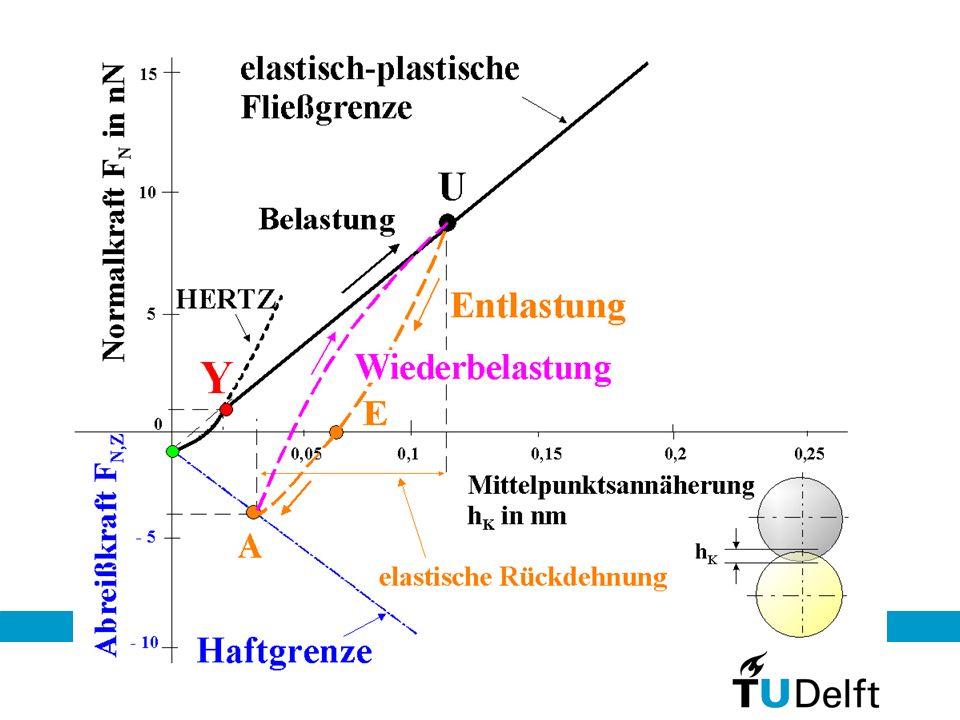
Hysteresis (plastic deformation)
")
13
- (too) simple - piecewise linear - easy to implement Contact model
 simple - piecewise linear - easy to implement Contact model")
14
- (really too) simple - linear - very easy to implement Linear Contact model
 simple - linear - very easy to implement Linear Contact model")
15
- simple - non-linear - easy to implement Hertz Contact model

16
Sound Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl

17
Sound 3-dimensional modeling of sound propagation Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl P-wave shape and speed

18
potential energyrotationsdisplacements Micro simulation of shear bands

19
Strain Control (top): Initial position and final position z 0 and z f Stress-control (right): With wall mass: m x, friction x and (i)Bulk material force F x (t) (ii)External force –p x z(t), and (iii)Frictional force x x(t) Model system bi-axial box
: Initial position and final position z 0 and z f Stress-control (right): With wall mass: m x, friction x and (i)Bulk material force F x (t) (ii)External force –p x z(t), and (iii)Frictional force x x(t) Model system bi-axial box")
20
zz =9.1% zz =4.2% zz =1.1% zz =0.0% Simulation results

21
Bi-axial box

23
Introduction Results DEM Micro-macro (global) Contacts Many particle simulation Continuum Theory Contents
 Contacts Many particle simulation Continuum Theory Contents")
24
Bi-axial compression with p x =const.

25
geometrical friction angle kc/k20½124kc/k20½124 p x 100 zz 183 234 264 310 336 p x 500 zz 798 853 915 941 972 c 11 32 40 60 71 f min macro cohesion Cohesion – no friction

26
Sliding contact points: - Static Coulomb friction - Dynamic Coulomb friction Tangential contact model

27
- Static friction - Dynamic friction project into tangential plane compute test force sticking: sliding: Tangential contact model - spring - dashpot before contact static dynamic static

28
k c = 0 and µ = 0.5 Internal friction angle Total friction angle Friction – no cohesion

29
Bi-axial box rotations

30
Direction, amplitude, anti-symmetric (!) stress Rotations (local)
 stress Rotations (local)")
31
Rolling (mimic roughness or steady contact necks) - Static rolling resistance - Dynamic resistance Tangential contact model
 - Static rolling resistance - Dynamic resistance Tangential contact model")
32
Silo Flow with friction +rolling friction

33
Silo Flow with friction

34
Tangential contact model Torsion (large contact area) - Static torsion resistance - Dynamic resistance
 - Static torsion resistance - Dynamic resistance")
35
DEM simulation macroscopic material behaviour Micro: Disks (in 2-D) Particle size a = [0.5 : 1.5] mm Stiffness k 2 = 10 5 Nm -1 and k 1 =k 2 /2 Cohesion k c = 0, ½, 1, 2, 4 k 2 Friction µ = 0 Macro: Youngs Modulus E k 1 Poisson ratio 0.66 Friction angle 13° (µ=0) and 31° (µ=0.5) Dilatancy angle 5° (p=500) and 11° (p=100) Cohesion: + Bi-axial box setup Summary: micro-macro (global)
![DEM simulation macroscopic material behaviour Micro: Disks (in 2-D) Particle size a = [0.5 : 1.5] mm Stiffness k 2 = 10 5 Nm -1 and k 1 =k 2 /2 Cohesion k c = 0, ½, 1, 2, 4 k 2 Friction µ = 0 Macro: Youngs Modulus E k 1 Poisson ratio 0.66 Friction angle 13° (µ=0) and 31° (µ=0.5) Dilatancy angle 5° (p=500) and 11° (p=100) Cohesion: + Bi-axial box setup Summary: micro-macro (global)](http://images.slideplayer.com/2/737796/slides/slide_35.jpg "DEM simulation macroscopic material behaviour Micro: Disks (in 2-D) Particle size a = [0.5 : 1.5] mm Stiffness k 2 = 10 5 Nm -1 and k 1 =k 2 /2 Cohesion k c = 0, ½, 1, 2, 4 k 2 Friction µ = 0 Macro: Youngs Modulus E k 1 Poisson ratio 0.66 Friction angle 13° (µ=0) and 31° (µ=0.5) Dilatancy angle 5° (p=500) and 11° (p=100) Cohesion: + Bi-axial box setup Summary: micro-macro (global)")
36
An-isotropy

37
Stiffness tensor vertical horizontal shear anisotropy

38
An-isotropy Structure changes with deformation Different stiffness: More stiff against shear Less stiff perpendicular Evolution with time:

39
Stiffness tensor vertical horizontal shear shear1 shear2 shear3

40
From virtual work … For each single contact … Þ Stress tensor Þ Stiffness matrix C (elastic) - Normal contacts - Tangential springs Deformations (2D): - Isotropic compression V - Deviatoric strain (=shear) D, Þ Stress changes - Isotropic V - Deviatoric D, Local micro-macro transition
 - Normal contacts - Tangential springs Deformations (2D): - Isotropic compression V - Deviatoric strain (=shear) D, Þ Stress changes - Isotropic V - Deviatoric D, Local micro-macro transition")
41
Constitutive model with rotations

42
+ successful tool – few parameters - microscopic foundations ? - extensions & parameter identification Continuum Theory deformation - rotations cyclic deformations - creep Hypoplastic FEM model

43
density vs. pressure & friction vs. density Micro-macro transition

44
Granular media are: - compressible - inhomogeneous (force-chains) - (almost always) an-isotropic and - micro-polar (rotations) Summary – part 1: global view
 - (almost always) an-isotropic and - micro-polar (rotations) Summary – part 1: global view")
45
Introduction Results Micro-macro (global) Micro-macro (local) Single particle Contacts Many particle simulation Continuum Theory Contents
 Micro-macro (local) Single particle Contacts Many particle simulation Continuum Theory Contents")
46
Global average vs. Local average Global + Experimentally accessible data - Wall effects - Averaging over inhomogeneities Local - Difficult to compare to experiment + Averages away from the walls + Average over `similar volume elements

47
potential energyrotationsdisplacements Micro informations: shear bands

48
Direction, amplitude, anti-symmetric (!) stress Rotations (local)
 stress Rotations (local)")
49
Ring geometry (Behringer et al.)
")
50
Ring geometry

51
2D shear cell – energy

52
2D shear cell – force chains

53
2D shear cell – shear band

54
Ring geometry

56
Averaging Formalism Any quantity: In averaging volume:

57
Averaging Formalism Any quantity: - Scalar - Vector - Tensor

58
Averaging Density Any quantity: - Scalar: Density/volume fraction

59
Density profile Global volume fraction

60
Any quantity: - Scalar - Vector – velocity density Averaging Velocity

61
Velocity field exponential

62
Velocity gradient exponential:

63
Velocity gradient exponential:

64
Velocity distribution

65
Averaging Fabric Any quantity: - Scalar: contacts - Vector: normal - Contact distribution

66
Fabric tensor contact probability … centerwall

67
Fabric tensor (trace) contact number density
 contact number density")
68
Macro (contact density)
")
69
Fabric tensor (deviator) an-isotropy (!)
 an-isotropy (!)")
70
Averaging Stress Any quantity: - Scalar - Vector - Tensor: Stress

71
Stress tensor (static) shear stress
 shear stress")
72
Stress tensor (dynamic) exponential
 exponential")
73
Stress equilibrium (1) acceleration:
 acceleration:")
74
Stress equilibrium (2) ? ?
")
75
Averaging Deformations Deformation: - Scalar - Vector - Tensor: Deformation

76
Macro (bulk modulus)
")
77
Macro (shear modulus)
")
78
Constitutive model – no rotations

79
Averaging Rotations Deformation: - Scalar - Vector: Spin density - Tensor

80
Rotations – spin density eigen-rotation:

81
Spin distribution

82
Velocity-spin distribution high dens.low dens. sim. exp.

83
Macro (torque stiffness)
")
84
Deformations (2D): - Isotropic V - Deviatoric (=shear) D, - Mean rotation (=slip) * - Difference rot. (=rolling) ** Þ Stress changes ??? - Isotropic V - Deviatoric D, - Asymmetric A An-isotropy and rotations
 ** Þ Stress changes . - Isotropic V - Deviatoric D, - Asymmetric A An-isotropy and rotations.")
85
Constitutive model with rotations

86
Granular media are: - compressible - inhomogeneous (force-chains) - (almost always) an-isotropic - micro-polar (rotations) Summary Granular media are … … interesting
 - (almost always) an-isotropic - micro-polar (rotations) Summary Granular media are … … interesting")
87
Open issues Accounting for inhomogeneities (temperature) Structure evolution with deformation (time) Micropolar continuum theory …
 Structure evolution with deformation (time) Micropolar continuum theory …")
88
The End

90
Contact force measurement (PIA)
")
91
Hysteresis (plastic deformation)
")
92
- (too) simple - piecewise linear - easy to implement Contact model
 simple - piecewise linear - easy to implement Contact model")
93
- (really too) simple - linear - very easy to implement Linear Contact model
 simple - linear - very easy to implement Linear Contact model")
94
- simple - non-linear - easy to implement Hertz Contact model

95
Sound Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl

96
Sound 3-dimensional modeling of sound propagation Particle Technology, DelftChemTech, Julianalaan 136, 2628 BL Delft Stefan Luding, s.luding@tnw.tudelft.nl P-wave shape and speed

97
Sliding contact points: - Static Coulomb friction - Dynamic Coulomb friction Tangential contact model

98
- Static friction - Dynamic friction project into tangential plane compute test force sticking: sliding: Tangential contact model - spring - dashpot before contact static dynamic static

99
Bi-axial box rotations

100
Direction, amplitude, anti-symmetric (!) stress Rotations (local)
 stress Rotations (local)")
101
Rolling (mimic roughness or steady contact necks) - Static rolling resistance - Dynamic resistance Tangential contact model
 - Static rolling resistance - Dynamic resistance Tangential contact model")
102
Silo Flow with friction +rolling friction

103
Silo Flow with friction

104
Tangential contact model Torsion (large contact area) - Static torsion resistance - Dynamic resistance
 - Static torsion resistance - Dynamic resistance")
106
+ successful tool – few parameters - microscopic foundations ? - extensions & parameter identification Continuum Theory deformation - rotations cyclic deformations - creep Hypoplastic FEM model

107
density vs. pressure & friction vs. density Micro-macro transition

108
From virtual work … For each single contact … Þ Stress tensor Þ Stiffness matrix C (elastic) - Normal contacts - Tangential springs Deformations (2D): - Isotropic compression V - Deviatoric strain (=shear) D, Þ Stress changes - Isotropic V - Deviatoric D, Local micro-macro transition
 - Normal contacts - Tangential springs Deformations (2D): - Isotropic compression V - Deviatoric strain (=shear) D, Þ Stress changes - Isotropic V - Deviatoric D, Local micro-macro transition")
111
page with logo

Similar presentations











 1. Anderson's Theory of Faulting 2. Rheology (mechanical behavior of rocks) - Elastic: Hooke's.>")

>")

 DENSE GRANULAR MATERIALS Microscopic origins of macroscopic behaviour GdR CHANT.>")





 ATensile stress (+) Compressive.>")

