Download presentation
Presentation is loading. Please wait.

1
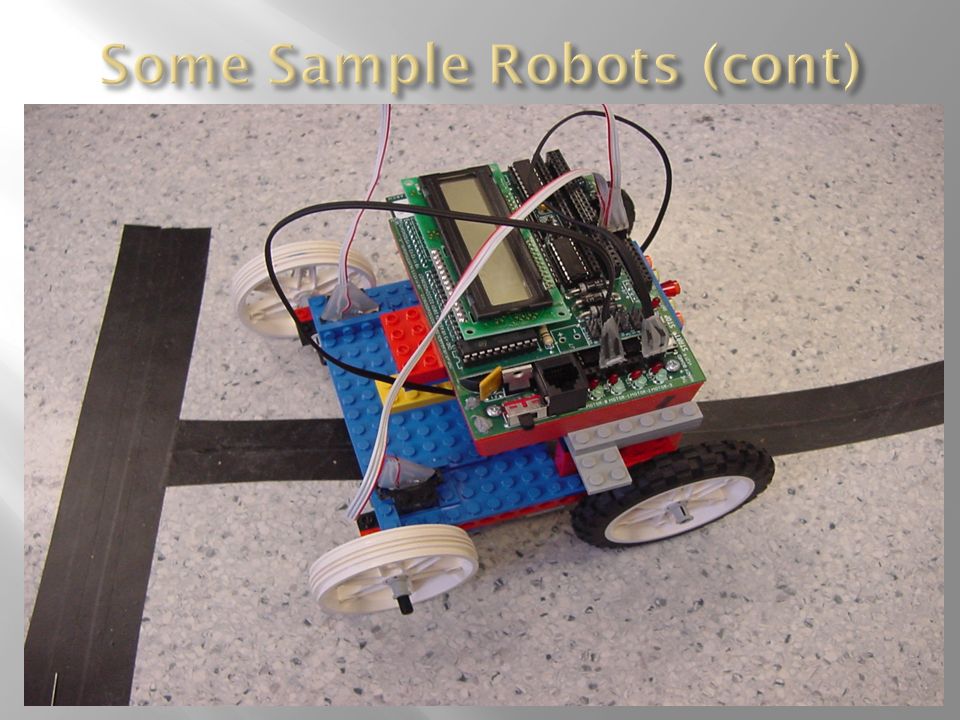
Lego Robot Construction Project

2
Adam, Roger, Lu, Riana, Paul

3
Learn the basics of the Interactive C program. Learn how processors and sensors work within the Interactive C program. Design a code that would allow the robot perform the following tasks: Follow a path set down by thick black tape. At the end of the path, make a u-turn and return to its starting position.

4
1 handyboard RJ-11 Cable Serial Port interface C AdapterSerial Port cable (25 pin to 9 pin) 2 large wheels 2 small wheels Computer running Interactive C 8.0 Lego pieces 2 motors 2 analog light sensors
 2 large wheels 2 small wheels Computer running Interactive C 8.0 Lego pieces 2 motors 2 analog light sensors")
5
void main () { int lap; /* create a counter to count how many times the the robot has completed the course*/ int rightsensor; // creates variable for the right sensor int leftsensor; // creates variable for the left sensor while (start_button ()==0) {} /*while start button is not pushed, do nothing*/ while (1) // one infinite loop { leftsensor=analog(5); // defines left sensor as analog 5 rightsensor=analog(6); // defines right senor as analog 6 if ((leftsensor < 150) && (rightsensor < 150)) /* if neither sensor is touching black lines, the robot moves forward*/ { motor(1,15); motor(3,15); } else if ((leftsensor = 150)) /* if the left sensor reads white and the right sensor reads black, the robot will turn right*/ { motor (1,100); motor (3,-100); } else if ((leftsensor >= 150) && (rightsensor < 150)) /* if the left sensor reads black and the right sensor reads white, the robot will turn left*/ { motor (1,-100); motor (3,100); }
 { int lap; /* create a counter to count how many times the the robot has completed the course*/ int rightsensor; // creates variable for the right sensor int leftsensor; // creates variable for the left sensor while (start_button ()==0) {} /*while start button is not pushed, do nothing*/ while (1) // one infinite loop { leftsensor=analog(5); // defines left sensor as analog 5 rightsensor=analog(6); // defines right senor as analog 6 if ((leftsensor < 150) && (rightsensor < 150)) /* if neither sensor is touching black lines, the robot moves forward*/ { motor(1,15); motor(3,15); } else if ((leftsensor = 150)) /* if the left sensor reads white and the right sensor reads black, the robot will turn right*/ { motor (1,100); motor (3,-100); } else if ((leftsensor >= 150) && (rightsensor < 150)) /* if the left sensor reads black and the right sensor reads white, the robot will turn left*/ { motor (1,-100); motor (3,100); }")
6
else // if both sensors read black { if (lap <1) /*if the robot has only completed 1 lap, then it will turn around and do follow the track for its second lap*/ { lap = 0; ao (); sleep (2.0); motor (1,-50); motor (3,50); sleep (1.25); lap++; } else // if the robot has completed the course, it will shut off { ao (); break; } ao (); //all motors will shut off }
 /*if the robot has only completed 1 lap, then it will turn around and do follow the track for its second lap*/ { lap = 0; ao (); sleep (2.0); motor (1,-50); motor (3,50); sleep (1.25); lap++; } else // if the robot has completed the course, it will shut off { ao (); break; } ao (); //all motors will shut off }")
7
Build body Wheels or tread? We chose a high starting speed but had to adjust it We assigned jobs according to talent- worked out well Order of creation Body and program created Test runs made Corrections made to program for efficiency

9
The lack of Gears - without gears there is less torque, therefore turns are harder. Friction - the friction forced our wheel off. Program - we had to cover all possibilities that the sensor could read. Motor Strength - without gears we had to constantly test the speed. If the strength was too weak, the robot did not turn. If it were to strong, it flew off the S curve. Completed the S curve without gears. Completed the course with full speed. Created three successful codes, in which one implemented a break statement. Built a sturdy robot that had the head of R2D2. ChallengesSuccesses

11
Creating a centrifuge to accelerate the separation of oil from water. How?- Put the substance in circular motion in order for the centrifugal force to separate oil from water more quickly. Using the skills obtained from this project to apply to real life situations. - The separation of proteins and DNA - Sedimentation of cells and viruses -Separation of certain substances for purification purposes.

12
a device that separates liquids based on their density driven by an electric motor puts an object in rotation around a fixed axis, applying a force perpendicular to the axis.

13
void main() { int speed = 0; float separation_time=4.0 ; float ramp_time= 0.1 printf ("\nPress start to being?"); while (start_button() == 0) {} // read value of oil + water mixed up while (stop_button()==0) { printf ("\n mixed up value=%d", analog (20)); sleep(0.2); } // ramp up motor while (speed < 100) { // turn on motor at ?speed? motor(1, speed); // sleep for ramp_time sleep(ramp_time); // increment speed variable speed = speed + 1; } // full speed ahead! sleep ( separation_time ); // ramp motor down while (speed > 0) { // do the reverse of ramp up loop motor(1, speed); sleep(ramp_time); speed = speed - 1; } ao(); }
; // sleep for ramp_time sleep(ramp_time); // increment speed variable speed = speed + 1; } // full speed ahead. sleep ( separation_time ); // ramp motor down while (speed > 0) { // do the reverse of ramp up loop motor(1, speed); sleep(ramp_time); speed = speed - 1; } ao(); }.")
14
Trial # Sensor Reading (before separation) Sensor Reading (after separation) Ramp UP time (s) Time separation (s) Ramp DOWN time (s) oilwater 1200120200101 220070150104 320070150105 420040180204 520070130205 Motor Power (%) t2 t t1 100 Conclusion: With longer ramp up time and separation time, the oil and water will be separated more clearly.
 Sensor Reading (after separation) Ramp UP time (s) Time separation (s) Ramp DOWN time (s) oilwater Motor Power (%) t2 t t1 100 Conclusion: With longer ramp up time and separation time, the oil and water will be separated more clearly.")
15
We tested the sensor for each change in environment so that our robot would remain on the right path. We used a break statement to end the nearest while loop and to successful complete two laps. We played with the adjustment of the speeds of the motors to successful turn as smooth as possible. We wanted to add gears to increase torque and make the turns easier. We wanted to use a code without a break statement. What we’ve learned… What we wanted to add…

Similar presentations


 Robot Workshop 2015 Instructor: Dr. Fred Brauchler Assistant: Chris Parker 2/7/2015Lawrence Technological University1.>")








 into a MyBlock.>")







: Rachel Bevill, Brae Bower, Samantha Cherbonneau, Professor Ahmadi, Anthony Contreras.>")
