Download presentation
Presentation is loading. Please wait.

1
Group Four Catherine Fahey, Steven Falzerano, Nicollette Fernandez, Eliot M. Fine and Stefan Toubia

2
Los Jefes Darth Vader

3
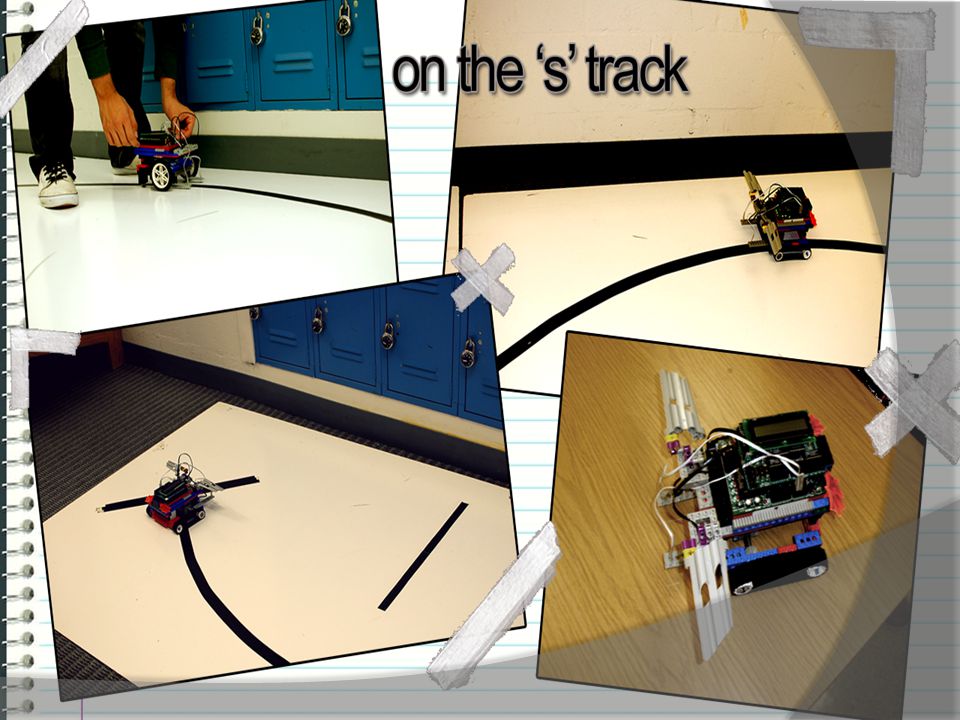
Objective To create a robot that follows a course laid out in black tape, make a u-turn, and return to the starting line following the tape again. In doing so, we can learn more about Interactive C programming and the Handyboard.

4
Resources Handyboard 2 motors 2 analog light sensors, Lego's (this includes treads, wheels, and gears)
")
5
Procedure: We chose: Treads: because the robot was able to make the adjustments more easily, and also the robot got more traction Gears: because the motors were too weak to actually move the robot Our trial-and-error process helped us come to these conclusions.

6
Code void main(){ int lap; lap=0; while(start_button()==0){} while(1){ if(analog(5)<200 && analog(6)<200){ motor(1,100); motor(3,100); // if the light sensors read white then both motors go forward at a speed of 20 } else if(analog(5)>=200 && analog(6)<200){ motor(1,-100); motor(3,100); // but if analog 5 reads dark (the black tape), then the robot will turn right } else if(analog(5) =200){ motor(1,100); motor(3,-100); //but if analog 6 read dark, then the robot will turn left } else if(lap==0 && analog(5)>=200 && analog (6)>=200){ motor(1,-100); motor(3,100); sleep(1.5); //the robot reads dark, then the robot will make a u-turn and head to the start line while(analog(5)<200{}; lap ++; //new lap, repeats above but goes to next statement when reaches start line } else{ ao();// robot turns off once at start line again }
{ int lap; lap=0; while(start_button()==0){} while(1){ if(analog(5)<200 && analog(6)<200){ motor(1,100); motor(3,100); // if the light sensors read white then both motors go forward at a speed of 20 } else if(analog(5)>=200 && analog(6)<200){ motor(1,-100); motor(3,100); // but if analog 5 reads dark (the black tape), then the robot will turn right } else if(analog(5) =200){ motor(1,100); motor(3,-100); //but if analog 6 read dark, then the robot will turn left } else if(lap==0 && analog(5)>=200 && analog (6)>=200){ motor(1,-100); motor(3,100); sleep(1.5); //the robot reads dark, then the robot will make a u-turn and head to the start line while(analog(5)<200{}; lap ++; //new lap, repeats above but goes to next statement when reaches start line } else{ ao();// robot turns off once at start line again }")
8
Challenges: Friction Our original design (3 wheels: 2 with tires, 1 without), did not pick up enough friction Our original design (3 wheels: 2 with tires, 1 without), did not pick up enough friction Switched to treads Switched to treads ○ Motors were too weak, so we had to add gears to help give more force
, did not pick up enough friction Our original design (3 wheels: 2 with tires, 1 without), did not pick up enough friction Switched to treads Switched to treads ○ Motors were too weak, so we had to add gears to help give more force")
10
What is a Centrifuge? A piece of equipment that rotates about an axis Uses centrifugal forces to separate substances Heaviest molecules move to the bottom of the tube Used in biology, chemistry, and aeronautics Separate substances Meselson and Stahl experiment

11
Set Up Used: IR “Top-Hat” sensor, scotch tape and a cuvette, gears, wheels Constructed: Base of legos Motor with gears to create an axel T-shaped crossbar attached to the axel One side had a cuvette the other had a counterweight Tires attached to base to act as shock absorbers and supports *Note: need white paper behind cuvette

12
die Windmühle

13
Code void main(){ int speed=0; float separation_time=5.0;// Time, seconds, that centrifuge will spin float ramp_time=0.1;// Time, seconds, between speeds printf ("\nHold Down Start Button to Take Readings"); while (start_button()==0) {} while (start_button()==1) {// Top-Hat reads while button is pressed printf ("\nAmount mixed is %d", analog(3)); sleep (0.2); } while (speed<=100) {// Speed gradually increases from 0 to 100 printf ("\nSpeed is %d",speed); motor (1,speed); sleep (ramp_time); speed++; } sleep (separation_time);// Centrifuge spins for specified time at 100 while (speed>0) {// Speed gradually decreases from 100 to 0 printf ("\nSpeed is %d",speed); motor (1,speed); sleep (ramp_time); speed--; } ao(); while (speed==0) {// Everthing shuts off and Top-Hat reads again printf ("\nMixation = %d, Did they separate?”,analog(3)); sleep (0.2); } http://tinypic.com/player.php?v=34njo6s&s=4
{ int speed=0; float separation_time=5.0;// Time, seconds, that centrifuge will spin float ramp_time=0.1;// Time, seconds, between speeds printf ( \nHold Down Start Button to Take Readings ); while (start_button()==0) {} while (start_button()==1) {// Top-Hat reads while button is pressed printf ( \nAmount mixed is %d , analog(3)); sleep (0.2); } while (speed<=100) {// Speed gradually increases from 0 to 100 printf ( \nSpeed is %d ,speed); motor (1,speed); sleep (ramp_time); speed++; } sleep (separation_time);// Centrifuge spins for specified time at 100 while (speed>0) {// Speed gradually decreases from 100 to 0 printf ( \nSpeed is %d ,speed); motor (1,speed); sleep (ramp_time); speed--; } ao(); while (speed==0) {// Everthing shuts off and Top-Hat reads again printf ( \nMixation = %d, Did they separate ,analog(3)); sleep (0.2); } v=34njo6s&s=4")
14
Data:

15
Conclusions We learned: ○ From the Robot: ○ Treads are slower but they have more traction ○ Going from big gears to small gears increases speed and from small gears to big gears increases torque ○ A sturdy frame is crucial Improvements: ○ Our code could have had a slower, more careful turn, so that it would not whip around Improvements with the centrifuge: ○ Faster motors, more durable parts, more easily- removable cuvettes, a built-in IR sensor ○ The code did work extremely well though

Similar presentations



. Students should lead their teams in the building, design, and all other aspects of the robot. Knowledge of the Kit.>")














: Rachel Bevill, Brae Bower, Samantha Cherbonneau, Professor Ahmadi, Anthony Contreras.>")

