Download presentation
Presentation is loading. Please wait.

2
Click to edit Master text styles Second level Third level Fourth level Fifth level Click to edit Master title style Blind Source Separation: Finding Needles in Haystacks Scott C. Douglas Department of Electrical Engineering Southern Methodist University douglas@lyle.smu.edu

3
Signal Mixtures are Everywhere Cell Phones Radio Astronomy Brain Activity Speech/Music How do we make sense of it all?

4
Example: Speech Enhancement

5
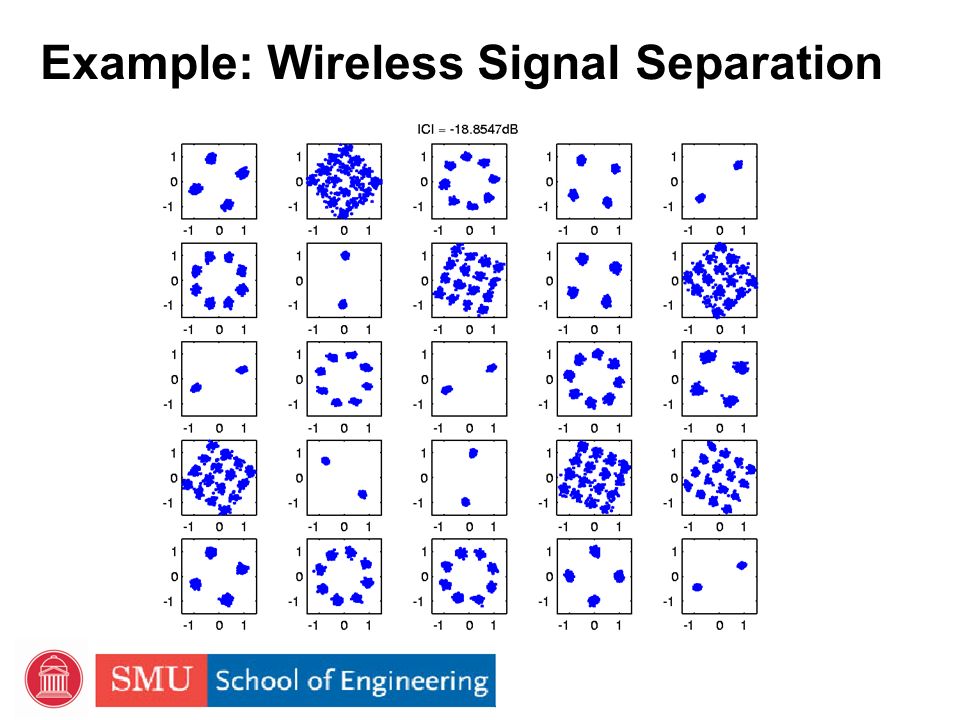
Example: Wireless Signal Separation

9
Outline of Talk Blind Source Separation General concepts and approaches Convolutive Blind Source Separation Application to multi-microphone speech recordings Complex Blind Source Separation What differentiates the complex-valued case Conclusions

10
Blind Source Separation (BSS) - A Simple Math Example Let s 1 (k), s 2 (k),…, s m (k) be signals of interest Measurements: For 1 i m, x i (k) = a i1 s 1 (k) + a i2 s 2 (k) + … + a im s m (k) Sensor noise is neglected Dispersion (echo/reverberation) is absent AB s(k)s(k)x(k)x(k) y(k)y(k)
 - A Simple Math Example Let s 1 (k), s 2 (k),…, s m (k) be signals of interest Measurements: For 1 i m, x i (k) = a i1 s 1 (k) + a i2 s 2 (k) + … + a im s m (k) Sensor noise is neglected Dispersion (echo/reverberation) is absent AB s(k)s(k)x(k)x(k) y(k)y(k)")
11
Blind Source Separation Example (continued) AB s(k)s(k)x(k)x(k) y(k)y(k) Can Show: The s i (k)s can be recovered as y i (k) = b i1 x 1 (k) + b i2 x 2 (k) + … + b im x m (k) up to permutation and scaling factors (the matrix B is like the inverse of matrix A) Problem: How do you find the demixing b ij s when you dont know the mixing a ij s or s j (k)s?
 AB s(k)s(k)x(k)x(k) y(k)y(k) Can Show: The s i (k)s can be recovered as y i (k) = b i1 x 1 (k) + b i2 x 2 (k) + … + b im x m (k) up to permutation and scaling factors (the matrix B is like the inverse of matrix A) Problem: How do you find the demixing b ij s when you dont know the mixing a ij s or s j (k)s")
12
Why Blind Source Separation? (Why not Traditional Beamforming?) BSS requires no knowledge of sensor geometry. The system can be uncalibrated, with unmatched sensors. BSS does not need knowledge of source positions relative to the sensor array. BSS requires little to no knowledge of signal types - can push decisions/ detections to the end of the processing chain.
 BSS requires no knowledge of sensor geometry. The system can be uncalibrated, with unmatched sensors. BSS does not need knowledge of source positions relative to the sensor array. BSS requires little to no knowledge of signal types - can push decisions/ detections to the end of the processing chain..")
13
What Properties Are Necessary for BSS to Work? Separation can be achieved when (# sensors) (# of sources) The talker signals {s j (t)} are statistically-independent of each other and are non-Gaussian in amplitude OR have spectra that differ from each other OR are non-stationary Statistical independence is the critical assumption.
 (# of sources) The talker signals {s j (t)} are statistically-independent of each other and are non-Gaussian in amplitude OR have spectra that differ from each other OR are non-stationary Statistical independence is the critical assumption..")
14
Entropy is the Key to Source Separation Entropy: A measure of regularity In BSS, separated signals are demixed and, have more order as a group. First used in 1996 for speech separation. - In physics, entropy increases (less order) - In biology, entropy decreases (more order)
 - In biology, entropy decreases (more order).")
15
Convolutive Blind Source Separation Mixing system is dispersive: Separation System B(z) is a multichannel filter
 is a multichannel filter")
16
Goal of Convolutive BSS Key idea: For convolutive BSS, sources are arbitrarily filtered and arbitrarily shuffled

17
Non-Gaussian-Based Blind Source Separation Basic Goal: Make the output signals look non- Gaussian, because mixtures look more Gaussian (from the Central Limit Theorem) Criteria Based On This Goal: Density Modeling Contrast Functions Property Restoral [e.g. (Non-)Constant Modulus Algorithm] Implications: Separating capability of the criteria will be similar Implementation details (e.g. optimization strategy) will yield performance differences
Constant Modulus Algorithm] Implications: Separating capability of the criteria will be similar Implementation details (e.g. optimization strategy) will yield performance differences.")
18
BSS for Convolutive Mixtures Idea: Translate separation task into frequency domain and apply multiple independent instantaneous BSS procedures Does not work due to permutation problems A Better Idea: Reformulate separation tasks in the context of multichannel filtering Separation criterion stays in the time domain – no implied permutation problem Can still employ fast convolution methods for efficient implementation

19
Natural Gradient Convolutive BSS Alg. [Amari/Douglas/Cichocki/Yang 1997] where f(y) is a simple vector-valued nonlinearity. Criterion: Density-based (Maximum Likelihood) Complexity: about four multiply/adds per tap =
 is a simple vector-valued nonlinearity. Criterion: Density-based (Maximum Likelihood) Complexity: about four multiply/adds per tap =.")
20
Blind Source Separation Toolbox A MATLAB toolbox of robust source separation algorithms for noisy convolutive mixtures (developed under govt. contract) Allows us to evaluate relationships and tradeoffs between different approaches easily and rapidly Used to determine when a particular algorithm or approach is appropriate for a particular (acoustic) measurement scenario
 Allows us to evaluate relationships and tradeoffs between different approaches easily and rapidly Used to determine when a particular algorithm or approach is appropriate for a particular (acoustic) measurement scenario.")
21
Speech Enhancement Methods Classic (frequency selective) linear filtering Only useful for the simplest of situations Single-microphone spectral subtraction: Only useful if the signal is reasonably well- separated to begin with ( > 5dB SINR ) Tends to introduce musical artifacts Research Focus: How to leverage multiple microphones to achieve robust signal enhancement with minimal knowledge.
 linear filtering Only useful for the simplest of situations Single-microphone spectral subtraction: Only useful if the signal is reasonably well- separated to begin with ( > 5dB SINR ) Tends to introduce musical artifacts Research Focus: How to leverage multiple microphones to achieve robust signal enhancement with minimal knowledge.")
22
Novel Techniques for Speech Enhancement Blind Source Separation: Find all the talker signals in the room - loud and soft, high and low-pitched, near and far away … without knowledge of any of these characteristics. Multi-Microphone Signal Enhancement: Using only the knowledge of target present or target absent labels on the data, pull out the target signal from the noisy background.

23
SMU Multimedia Systems Lab Acoustic Facility Room (Nominal Configuration) Acoustically-treated RT = 300 ms Non-parallel walls to prevent flutter echo Sources Loudspeakers playing Recordings as well as live talkers. Distance to mics: 50 cm Angles: -30 o, 0 o, 27.5 o Sensors Omnidirectional Micro- phones (AT803b) Linear array (4cm spacing) Data collection and processing entirely within MATLAB. Allows for careful characterization, fast evaluation, and experimentation with artificial and human talkers.
 Linear array (4cm spacing) Data collection and processing entirely within MATLAB. Allows for careful characterization, fast evaluation, and experimentation with artificial and human talkers..")
24
Performance improvement: Between 10 dB and 15 dB for equal-level mixtures, and even higher for unequal-level ones. Blind Source Separation Example Convolutive Mixing (Room) Separation System (Code) Talker 1 (MG) Talker 2 (SCD)
 Separation System (Code) Talker 1 (MG) Talker 2 (SCD).")
25
Unequal Power Scenario Results Time-domain CBSS methods provide the greatest SIR improvements for weak sources; no significant improvement in SIR if the initial SIR is already large

26
Noise Source Speech Source Linear Processing Adaptive Algorithm Multi-Microphone Speech Enhancement Contains most speech Contains most noise y1y1 y2y2 y3y3 ynyn z1z1 z2z2 z3z3 znzn

27
Speech Enhancement via Iterative Multichannel Filtering System output at time k: a linear adaptive filter is a sequence of (n x n) matrices at iteration k. Goal: Adapt, over time such that the multichannel output contains signals with maximum speech energy in the first output.

28
Multichannel Speech Enhancement Algorithm A novel* technique for enhancing target speech in noise using two or more microphones via joint decorrelation Requires rough target identifier (i.e. when talker speech is present) Is adaptive to changing noise characteristics Knowledge of source locations, microphone positions, other characteristics not needed. Details in [Gupta and Douglas, IEEE Trans. Audio, Speech, Lang. Proc., May 2009] *Patent pending
 Is adaptive to changing noise characteristics Knowledge of source locations, microphone positions, other characteristics not needed. Details in [Gupta and Douglas, IEEE Trans. Audio, Speech, Lang. Proc., May 2009] *Patent pending.")
29
28 Performance Evaluations Room –Acoustically-treated, RT = 300 ms –Non-parallel walls to prevent flutter echo Sources –Loudspeakers playing BBC Recordings (Fs = 8kHz), 1 male/1-2 noise sources –Distance to mics: 1.3 m –Angles: -30 o, 0 o, 27.5 o Sensors –Linear array adjustable (4cm spacing) Room –Ordinary conference room (RT = 600ms) Sources –Loudspeakers playing BBC Recordings (Fs = 8kHz), 1 male/1-2 noise sources –Angles: -15 o, 15 o, 30 o Sensors –Omnidirectional Microphones (AT803b) –Linear array adjustable (4cm nominal spacing) 6 7 8 6 7 8
, 1 male/1-2 noise sources –Distance to mics: 1.3 m –Angles: -30 o, 0 o, 27.5 o Sensors –Linear array adjustable (4cm spacing) Room –Ordinary conference room (RT = 600ms) Sources –Loudspeakers playing BBC Recordings (Fs = 8kHz), 1 male/1-2 noise sources –Angles: -15 o, 15 o, 30 o Sensors –Omnidirectional Microphones (AT803b) –Linear array adjustable (4cm nominal spacing)")
30
Audio Examples Acoustic Lab: Initial SIR = -10dB, 3-Mic System Before:After: Acoustic Lab: Initial SIR = 0dB, 2-Mic System Before:After: Conference Room: Initial SIR = -10dB, 3-Mic System Before:After: Conference Room: Initial SIR = 5dB, 2-Mic System Before:After:

31
Effect of Noise Segment Length on Overall Performance

32
31 Diffuse Noise Source Example Noise Source: SMU Campus-Wide Air Handling System Data was recorded using a simple two- channel portable M- Audio recorder (16-bit, 48kHz) with it associated T-shaped omnidirectional stereo array at arms length, then downsampled to 8kHz.
 with it associated T-shaped omnidirectional stereo array at arms length, then downsampled to 8kHz.")
33
32 Air Handler Data Processing Step 1: Spatio-Temporal GEVD Processing on a frame-by-frame basis with L = 256, where Rv(k) = Ry(k-1); that is, data was whitened to the previous frame. Step 2: Least-squares multichannel linear prediction was used to remove tones. Step 3: Log-STSA spectral subtraction was applied to the first output channel.

34
Complex Blind Source Separation AB s(k)s(k)x(k)x(k) y(k)y(k) Signal Model: x(k) = A s(k) Both the s i (k)s in s(k) and the elements of A are complex-valued. Separating matrix B is complex-valued as well. It appears that there is little difference from the real-valued case…

35
Complex Circular vs. Complex Non- Circular Sources (Second-Order) Circular Source: The energies of the real and imaginary parts of s i (k) are the same. (Second-Order) Non-Circular Source: The energies of the real and imaginary parts of s i (k) are not the same. Non-CircularCircular
 Circular Source: The energies of the real and imaginary parts of s i (k) are the same. (Second-Order) Non-Circular Source: The energies of the real and imaginary parts of s i (k) are not the same. Non-CircularCircular.")
36
Why Complex Circularity Matters in Blind Source Separation Fact #1: It is possible to separate non-circular sources by decorrelation alone if their non- circularities differ [Eriksson and Koivunen, IEEE Trans. IT, 2006] Fact #2: The strong-uncorrelating transform is a unique linear transformation for identifying non- circular source subspaces using only covariance matrices. Fact #3: Knowledge of source non-circularity is required to obtain the best performance of a complex BSS procedure.

37
Complex Fixed Point Algorithm [Douglas 2007] NOTE: The MATLAB code involves both transposes and Hermitian transposes… and no, those arent mistakes!
![Complex Fixed Point Algorithm [Douglas 2007] NOTE: The MATLAB code involves both transposes and Hermitian transposes… and no, those arent mistakes!](http://images.slideplayer.com/2/702599/slides/slide_37.jpg "Complex Fixed Point Algorithm [Douglas 2007] NOTE: The MATLAB code involves both transposes and Hermitian transposes… and no, those arent mistakes!")
38
Performance Comparisons

39
Complex BSS Example Original Sources Sensor Signals 16-elem ULA, /4 Spacing 3000 Snapshots SINRs/elem: -17,-12,-5,-12,-12 (dB). DOAs( o ): -45,20,-15,49,35 CFPA1 Outputs Output SINRs (dB): 7,24,18,15,23 Complexity: ~3500 FLOPS per output sample
: -45,20,-15,49,35 CFPA1 Outputs Output SINRs (dB): 7,24,18,15,23 Complexity: ~3500 FLOPS per output sample.")
40
Conclusions Blind Source Separation provides unique capabilities for extracting useful signals from multiple sensor measurements corrupted by noise. Little to no knowledge of the sensor array geometry, the source positions, or the source statistics or characteristics is required. Algorithm design can be tricky. Opportunities for applications in speech enhancement, wireless communications, other areas.

41
For Further Reading My publications page at SMU: http://lyle.smu.edu/~douglas/puball.html It has available for download 82% of my published journal papers 75% of my published conference papers

Similar presentations






 1 Chapter 12 Cross-Layer.>")







![Introduction[1] •Three techniques are used independently or in tandem to improve receiver signal quality •Equalization compensates for.](/8/2430929/big_thumb.jpg "Introduction[1] •Three techniques are used independently or in tandem to improve receiver signal quality •Equalization compensates for.>")







 domain, pattern-based ground roll removal Morgan P. Brown* and Robert G. Clapp Stanford Exploration Project Stanford University.>")