Download presentation
Presentation is loading. Please wait.

1
ELECTRICAL ENGINEERING TECHNOLOGY EMT 113/4
Semester II 08/09 CHAPTER 3: AC MACHINES

2
Introduction Electrical Engineering Technology Semester II 08/09
2 major classes: a) Asynchronous machines / induction machines :– Motors or generators whose field current is supplied by magnetic induction (transformer action) into their field windings. b) Synchronous machines :– Motors or generators whose field current is supplied by a separate dc power source. Note: 1) Induction motor has the same physical stator as a synchronous machine, with a different rotor construction. 2) The fields circuit of most synchronous and induction machines are located on their rotors. Semester II 08/09 Motors = ac electrical energy mechanical energy Generators = mechanical energy ac electrical energy
 Asynchronous machines / induction machines :– Motors or generators whose field current is supplied by magnetic induction (transformer action) into their field windings. b) Synchronous machines :– Motors or generators whose field current is supplied by a separate dc power source. Note: 1) Induction motor has the same physical stator as a synchronous machine, with a different rotor construction. 2) The fields circuit of most synchronous and induction machines are located on their rotors. Semester II 08/09. Motors = ac electrical energy mechanical energy. Generators = mechanical energy ac electrical energy.")
3
AC Machinery Fundamental
Electrical Engineering Technology AC Machinery Fundamental A SIMPLE LOOP IN A UNIFORM MAGNETIC FIELDS. A rotating loop of wire within the magnetic field. Magnetic field produced by a large stationary magnet produce-constant and uniform magnetic field, B. Rotation of the loop induced a voltage in the wire. Current flows in the loop, a torque will be induced on the wire loop. Semester II 08/09 eind V ө

4
THE ROTATING MAGNETIC FIELD
Electrical Engineering Technology THE ROTATING MAGNETIC FIELD When two magnetic fields are present in a machine, a torque will be created which will tend to line up the two magnetic fields. Magnetic field is produced by the stator and rotor of an ac machine. Then a torque will be induced in the rotor cause the rotor to turn and align itself with the stator magnetic field. The induced torque in the rotor would cause the rotor to constantly “ chase “ the stator magnetic field around in circle the basic principle of all ac motor operation. Semester II 08/09

5
AC MACHINE POWER LOSSES
Electrical Engineering Technology AC MACHINE POWER LOSSES The efficiency of an AC machines is defined as: Four types of losses in AC machines: Electrical or copper losses (I2R losses) Core losses Mechanical losses Stray load losses Semester II 08/09
 Core losses. Mechanical losses. Stray load losses. Semester II 08/09.")
6
VOLTAGE REGULATION AND SPEED REGULATION
Electrical Engineering Technology VOLTAGE REGULATION AND SPEED REGULATION VR is a measure of the ability of a generator to keep a constant voltage at its terminals as load varies. It is defined as follow: Semester II 08/09 SR is a measure of the ability of a motor to keep a constant shaft speed as load varies.

7
Electrical Engineering Technology
INDUCTION MOTORS Semester II 08/09

8
Electrical Engineering Technology
Induction Motors Induction motors are the motor frequently encountered in industry. It simple, rugged, low-priced and easy to maintain. It run essentially constant speed from zero to full-load. The speed is frequency-dependent and consequently these motors are not easily adapted to speed control Induction machines is called induction because the rotor voltage (which produces the rotor current and the rotor magnetic field) is induced in the rotor winding rather than physically connected by wires. Semester II 08/09
 is induced in the rotor winding rather than physically connected by wires. Semester II 08/09.")
9
Induction Motor : Construction
Electrical Engineering Technology Induction Motor : Construction A 3-phase induction motor has two main parts : A stationary stator (stationary part of the machine) Revolving rotor (rotating part of the machine) The rotor is separated from the stator by a small air gap (the tolerances is depending on the power of the motor). Semester II 08/09
 Revolving rotor (rotating part of the machine) The rotor is separated from the stator by a small air gap (the tolerances is depending on the power of the motor). Semester II 08/09.")
10
Electrical Engineering Technology
Two types of rotor which can placed inside the stator: a) Squirrel-cage induction motor (Cage rotor) Semester II 08/09 b) Wound rotor induction motor
 Squirrel-cage induction motor (Cage rotor) Semester II 08/09. b) Wound rotor induction motor.")
11
Electrical Engineering Technology
a) Squirrel cage – the conductors would look like one of the exercise wheels that squirrel or hamsters run on. Semester II 08/09 Cage Induction Motor rotor consists of a series of conducting bars laid into slot carved in the face of rotor and shorted at either end by large shorting ring
 Squirrel cage – the conductors would look like one of the exercise wheels that squirrel or hamsters run on. Semester II 08/09. Cage Induction Motor rotor consists of a series of conducting bars laid into slot carved in the face of rotor and shorted at either end by large shorting ring.")
12
Electrical Engineering Technology
Semester II 08/09 Small cage rotor induction motor Large cage rotor induction motor

13
Electrical Engineering Technology
b) Wound rotor – have a brushes and slip ring at the end of rotor Semester II 08/09
 Wound rotor – have a brushes and slip ring at the end of rotor. Semester II 08/09.")
14
Electrical Engineering Technology
Wound rotor has a complete set of three-phase winding that are mirror images of the winding on the stator. - The three phases of the rotor windings are usually Y-connected, the end of the three rotor wires are tied to slip ring on the rotor shaft. - Rotor windings are shorted through brushes riding on the slip rings. Wound-rotor induction motors are more expansive than the cage induction motors, they required much more maintenance because the wear associated with their brushes and slip rings. Semester II 08/09

15
Induction Motor : Concepts INDUCED TORQUE IN AN INDUCTION MOTOR
Electrical Engineering Technology Induction Motor : Concepts INDUCED TORQUE IN AN INDUCTION MOTOR The three-phase of voltages has been applied to the stator, and three-phase set of stator current is flowing . These currents produce a magnetic field BS , rotating counterclockwise direction Semester II 08/09 The speed of the magnetic field’s rotation in a cage rotor induction motor (Figure 7.6, Chapman) is given by Where nsync = synchronous speed [r/min] fe = System frequency [Hz] p = number of poles This equation shows that the synchronous speed increases with frequency and decrease with the number of poles. .
 is given by. Where nsync = synchronous speed [r/min] fe = System frequency [Hz] p = number of poles. This equation shows that the synchronous speed increases with frequency and decrease with the number of poles. .")
16
Electrical Engineering Technology
This rotating field BS passes over the rotor bars and induces a voltage in them Where : v = velocity of the bar relative to the magnetic field B = magnetic flux density vector l = length of conductor in the magnetic field Semester II 08/09 It is a relative motion of the rotor compared to the stator magnetic field that produces induced voltage in a rotor bar. The rotor current flow produces a rotor magnetic field, BR. The induce torque in the machine is given by; The voltage induced in a rotor bar depends on the speed of the rotor relative to the magnetic fields So, resulting torque is counterclockwise.

17
THE CONCEPT OF ROTOR SLIP
Electrical Engineering Technology THE CONCEPT OF ROTOR SLIP Slip speed is defined as the differences between synchronous speed and rotor speed: Where nslip = slip speed of the machines nsync = speed of the magnetic field nm = mechanical shaft speed of motor Semester II 08/09 The other term used to describe the relative motion is slip, which is relative speed expressed on a per unit or a percentage basis. The slip is defined as :

18
Electrical Engineering Technology
The previous equation also can be expressed in term of angular velocity (radians per second) as : If the rotor turns at synchronous speed, s=0 ; if the rotor is stationary (locked or stop) , s=1. All normal motor speeds fall somewhere between those limits. As for mechanical speed Semester II 08/09 These equation are useful in the derivation of induction motor torque and power relationship.
 as : If the rotor turns at synchronous speed, s=0 ; if the rotor is stationary (locked or stop) , s=1. All normal motor speeds fall somewhere between those limits. As for mechanical speed. Semester II 08/09. These equation are useful in the derivation of induction motor torque and power relationship.")
19
THE ELECTRICAL FREQUENCY ON THE ROTOR.
Electrical Engineering Technology THE ELECTRICAL FREQUENCY ON THE ROTOR. The induction motor works by inducing voltages and current in the rotor of the machine-called a rotating transformer. Like a transformer; primary (stator) induced a voltage in the secondary (rotor) Unlike a transformer, the secondary frequency not necessarily the same as primary. If the rotor of a motor is locked so that it cannot move, the rotor will have the same frequency as the stator. If the rotor turns at synchronous speed, the frequency on the rotor will be zero. For nm=0 r/min & the rotor frequency fr=fe slip, s = 1 nm=nsync & the rotor frequency fr=0 slip, s = 0 - For any speed in between, the rotor frequency is directly proportional to the difference between the speed of the magnetic field nsync and the speed of the rotor nm. Semester II 08/09
 induced a voltage in the secondary (rotor) Unlike a transformer, the secondary frequency not necessarily the same as primary. If the rotor of a motor is locked so that it cannot move, the rotor will have the same frequency as the stator. If the rotor turns at synchronous speed, the frequency on the rotor will be zero. For nm=0 r/min & the rotor frequency fr=fe slip, s = 1. nm=nsync & the rotor frequency fr=0 slip, s = 0. - For any speed in between, the rotor frequency is directly proportional to the difference between the speed of the magnetic field nsync and the speed of the rotor nm. Semester II 08/09.")
20
THE ELECTRICAL FREQUENCY ON THE ROTOR
Electrical Engineering Technology THE ELECTRICAL FREQUENCY ON THE ROTOR Since the slip of the rotor is defined as : Then the rotor frequency can be expressed as : Substituting between these two equation become : Semester II 08/09 But nsync = 120fe/P, so Therefore, fr = frequency rotor; fe = frequency stator

21
Induction Motor : Equivalent Circuit
Electrical Engineering Technology Induction Motor : Equivalent Circuit Transformer model - model of the transformer action-induction of voltages and currents in the rotor circuit of an IM is essentially a transformer operation. - as in transformer model – certain resistance, self inductance in primary (stator) windings; magnetization curve and etc. b)Rotor circuit model The greater the relative motion between the rotor and the stator magnetic fields, the greater the resulting rotor voltage and frequency. Locked-rotor or blocked-rotor –the largest relative motion when the rotor is stationary. c) Final Equivalent circuit - Refer the rotor part of the model over the stator side. Semester II 08/09
 windings; magnetization curve and etc. b)Rotor circuit model. The greater the relative motion between the rotor and the stator magnetic fields, the greater the resulting rotor voltage and frequency. Locked-rotor or blocked-rotor –the largest relative motion when the rotor is stationary. c) Final Equivalent circuit. - Refer the rotor part of the model over the stator side. Semester II 08/09.")
22
Electrical Engineering Technology
A) TRANSFORMER MODEL Semester II 08/09 STATOR IDEAL TRANSFORMER ROTOR Symbol Description aeff Effective turn ratio – ratio of the conductors per phase on the stator to the conductors per phase on the rotor R1 Stator Resistance X1 Stator Leakage Reactance Rc Magnetizing reactance Xm Resistance losses (correspond to iron losses, windage and friction losses) E1 Primary internal stator voltage ER Secondary internal rotor voltage RR Rotor Resistance XR Rotor Reactance
 TRANSFORMER MODEL. Semester II 08/09. STATOR. IDEAL TRANSFORMER. ROTOR. Symbol. Description. aeff. Effective turn ratio – ratio of the conductors per phase on the stator to the conductors per phase on the rotor. R1. Stator Resistance. X1. Stator Leakage Reactance. Rc. Magnetizing reactance. Xm. Resistance losses (correspond to iron losses, windage and friction losses) E1. Primary internal stator voltage. ER. Secondary internal rotor voltage. RR. Rotor Resistance. XR. Rotor Reactance.")
23
Electrical Engineering Technology
Induction motor operates on the induction of voltage and current in its rotor circuit from the stator circuit (transformer action). An induction motor is called a singly excited machine, since power is supply to only the stator circuit. The flux in the machine is related to the integral of the applied voltage E1. The curve of magnetomotive force versus flux (magnetization curve) for this machine is compared to a similar curve for a power transformer. Semester II 08/09
. An induction motor is called a singly excited machine, since power is supply to only the stator circuit. The flux in the machine is related to the integral of the applied voltage E1. The curve of magnetomotive force versus flux (magnetization curve) for this machine is compared to a similar curve for a power transformer. Semester II 08/09.")
24
Electrical Engineering Technology
B) ROTOR CIRCUIT MODEL Suppose the motor run at a slip s, meaning that the rotor speed is ns (1-s), where ns is the synchronous speed, then this modify the values of VOLTAGE and CURRENT on the primary and secondary side. The frequency of the induced voltage at any slip will be given fr = sfe Assuming ER0 is the magnitude of the induced rotor voltage at LOCKED ROTOR condition the actual voltage induced because of slip (s) is, ER = sER0 The resistor is not frequency sensitive, the value of RR remain the same. The rotor inductance is frequency sensitive (X=L=2fL) then XR = sXR0 Figure 6 shows the equivalent circuit when motor is running at a slip (s). Semester II 08/09
 ROTOR CIRCUIT MODEL. Suppose the motor run at a slip s, meaning that the rotor speed is ns (1-s), where ns is the synchronous speed, then this modify the values of VOLTAGE and CURRENT on the primary and secondary side. The frequency of the induced voltage at any slip will be given. fr = sfe. Assuming ER0 is the magnitude of the induced rotor voltage at LOCKED ROTOR condition the actual voltage induced because of slip (s) is, ER = sER0. The resistor is not frequency sensitive, the value of RR remain the same. The rotor inductance is frequency sensitive (X=L=2fL) then. XR = sXR0. Figure 6 shows the equivalent circuit when motor is running at a slip (s). Semester II 08/09.")
25
Electrical Engineering Technology
Semester II 08/09 Equivalent circuit of a wound-rotor when it at locked or blocked condition The frequency of the voltages and currents in the stator is f, but the frequency of the voltages and currents in the rotor is sf.

26
Electrical Engineering Technology
ER = sER0 jXR=jsXR0 RR Then, resulting rotor equivalent circuit as below. The rotor current flow can be found as : ZReq Semester II 08/09 The rotor circuit model of an induction motor

27
Electrical Engineering Technology
Then the rotor equivalent circuit become: The rotor circuit model with all the frequency (slip) effects concentrated in resistor RR ER0 jsXR0 Semester II 08/09 ZReq
 effects concentrated in resistor RR. ER0. jsXR0. Semester II 08/09. ZReq.")
28
C) FINAL EQUIVALENT CIRCUIT
Electrical Engineering Technology C) FINAL EQUIVALENT CIRCUIT Remember, in transformer, the voltages, currents and impedances on the secondary side of the device can be referred to PRIMARY side by turn ratio of the transformer : Semester II 08/09 The same transformation can be used for the induction motor’s rotor circuit by using effective turn ratio aeff
 FINAL EQUIVALENT CIRCUIT. Remember, in transformer, the voltages, currents and impedances on the secondary side of the device can be referred to PRIMARY side by turn ratio of the transformer : Semester II 08/09. The same transformation can be used for the induction motor’s rotor circuit by using effective turn ratio aeff.")
29
Electrical Engineering Technology
The rotor circuit model that will be referred to the stator side as shown below Semester II 08/09 The per-phase equivalent circuit of an induction motor.

30
Electrical Engineering Technology
Input is 3 phase system of voltages and currents. Output is mechanical. Semester II 08/09 The power flow diagram of an induction motor – shows the relationship between the input electric power and output mechanical power.

31
Induction Motor :Power & Torque
Electrical Engineering Technology Induction Motor :Power & Torque Semester II 08/09 The per-phase equivalent circuit of an induction motor Input current Where

32
Torque Speed Characteristics
Electrical Engineering Technology Induction Motor : Torque Speed Characteristics Semester II 08/09

33
Electrical Engineering Technology
The induced torque of the motor is zero at synchronous speed. The torque speed curve is nearly linear between no-load and full-load. In this range, the rotor resistance is much larger than the rotor reactance. So, the rotor current increasing linearly. There is maximum possible torque that cannot be exceeded (called pullout torque or breakdown torque) is 2-3 times the rated full-load torque. Starting torque on motor is slightly larger than full-load. The torque on the motor for a given slip varies as the square of the applied voltage. If the rotor of the induction motor is driven faster than synchronous speed, then the direction of the induced torque in the machine reverse and become generator. If motor turning backward, relative to the direction of the magnetic field, the induced torque will stop the machine very rapidly and will try to rotate it in the other direction (called plugging). Semester II 08/09
 is 2-3 times the rated full-load torque. Starting torque on motor is slightly larger than full-load. The torque on the motor for a given slip varies as the square of the applied voltage. If the rotor of the induction motor is driven faster than synchronous speed, then the direction of the induced torque in the machine reverse and become generator. If motor turning backward, relative to the direction of the magnetic field, the induced torque will stop the machine very rapidly and will try to rotate it in the other direction (called plugging). Semester II 08/09.")
34
Induction Motor : Speed Control
Electrical Engineering Technology Induction Motor : Speed Control By pole changing By line frequency control By line voltage control By changing the rotor resistance Semester II 08/09 Note: 1 h.p = 746 Watts

35
Electrical Engineering Technology
SYNCHRONOUS MACHINE Semester II 08/09

36
Synchronous Machine : Introduction
Electrical Engineering Technology Synchronous Machine : Introduction Transformer – energy transfer device (transfer energy from primary to secondary) form of energy remain unchanged. (Electrical) (DC/AC) Machines – electrical energy is converted to mechanical or vice versa. Semester II 08/09 Motor operation The field induced voltage, E permits the motor to draw power from the line to be converted into mechanical power. This time, the mechanical output torque is also developing. The induced voltage is in opposition to the current flow-called counter emf.
 - form of energy remain unchanged. (Electrical) (DC/AC) Machines – electrical energy is converted to mechanical or vice versa. Semester II 08/09. Motor operation. The field induced voltage, E permits the motor to draw power from the line to be converted into mechanical power. This time, the mechanical output torque is also developing. The induced voltage is in opposition to the current flow-called counter emf.")
37
Electrical Engineering Technology
Generator operation The field induced voltage, E is in the same direction as the current and is called the “generated voltage”. The machine torque opposes the input mechanical torque that is trying to drive the generator, and it is called the counter torque. Semester II 08/09 Generally, the magnetic field in a machine forms the energy link between the electrical and mechanical systems. The magnetic field performs two functions: Magnetic attraction and repulsion produces mechanical torque (motor operation) The magnetic field by Faraday’s Law induces voltages in the coils of wire. (generator operation)
 The magnetic field by Faraday’s Law induces voltages in the coils of wire. (generator operation)")
38
Synchronous Machine : Construction
Electrical Engineering Technology Synchronous Machine : Construction Have an outside stationary part, (stator) The inner rotating part (rotor) The rotor is centered within the stator. Air gap - the space between the outside of the rotor and the inside of the stator Semester II 08/09 Origin of name: syn = equal, chronos = time Synchronous machines are called ‘synchronous’ because their mechanical shaft speed is directly related to the power system’s line frequency.
 The inner rotating part (rotor) The rotor is centered within the stator. Air gap - the space between the outside of. the rotor and the inside of the stator. Semester II 08/09. Origin of name: syn = equal, chronos = time. Synchronous machines are called ‘synchronous’ because their mechanical shaft speed is directly related to the power system’s line frequency.")
39
Electrical Engineering Technology
STATOR The stator of a synchronous machine carries the armature or load winding which is a three-phase winding. The armature winding is formed by interconnecting various conductors in slots spread over the periphery of the machine’s stator. Semester II 08/09 When current flows in the winding, each group produces a magnetic pole having a polarity dependent on the current direction, and a magnetomotive force (mmf) proportional to the current magnitude.
 proportional to the current magnitude.")
40
Electrical Engineering Technology
ROTOR 2 types of rotors - cylindrical (or round) rotors - salient pole rotors. Salient pole rotor less expensive than round rotors and rotate at lower speeds The rotor carries the field winding. The field current or the excitation current is provided by an external dc source. Synchronous machine rotors are simply rotating electromagnets built to have as many poles as are produced by the stator windings. Dc currents flowing in the field coils surrounding each pole magnetize the rotor poles. The magnetic field produced by the rotor poles locks in with a rotating stator field, so that the shaft and the stator field rotate in synchronism. Semester II 08/09
 rotors. - salient pole rotors. Salient pole rotor less expensive than round rotors. and rotate at lower speeds. The rotor carries the field winding. The field current or the excitation current is provided by an external dc source. Synchronous machine rotors are simply rotating electromagnets built to have as many poles as are produced by the stator windings. Dc currents flowing in the field coils surrounding each pole magnetize the rotor poles. The magnetic field produced by the rotor poles locks in with a rotating stator field, so that the shaft and the stator field rotate in synchronism. Semester II 08/09.")
41
Synchronous GENERATOR
Electrical Engineering Technology Synchronous GENERATOR 1. GENERATOR The rate of rotation of the magnetic fields in the machine is related to the stator electrical frequency, given as: Semester II 08/09 The internal generated voltage of a synchronous generator is given as, This equation shows the magnitude of the voltage induced in a given stator phase.

42
Electrical Engineering Technology
The per phase equivalent circuit Semester II 08/09

43
Electrical Engineering Technology
Voltage Regulation: If the generator operates at a terminal voltage VT while supplying a load corresponding to an armature current Ia, then; In an actual synchronous machine, the reactance is much greater than the armature resistance, in which case; Among the steady-state characteristics of a synchronous generator, its voltage regulation and power-angle characteristics are the most important ones. As for transformers, the voltage regulation of a synchronous generator is defined at a given load as; Semester II 08/09

44
Electrical Engineering Technology
Phasor Diagram: The phasor diagram is to shows the relationship among the voltages within a phase (Eφ,Vφ, jXSIA and RAIA) and the current IA in the phase. Semester II 08/09
 and the current IA in the phase. Semester II 08/09.")
45
Electrical Engineering Technology
Lagging P.F Semester II 08/09 Leading P.F.

46
Electrical Engineering Technology
Power and Torque: In generators, not all the mechanical power going into a synchronous generator becomes electric power out of the machine The power losses in generator are represented by difference between output power and input power shown in power flow diagram below. Pconv Semester II 08/09

47
Electrical Engineering Technology
Losses: Rotor - resistance; iron parts moving in a magnetic field causing currents to be generated in the rotor body - resistance of connections to the rotor (slip rings) Stator - resistance; magnetic losses (e.g., hysteresis) Mechanical - friction at bearings, friction at slip rings Stray load losses - due to non-uniform current distribution Semester II 08/09
 Stator. - resistance; magnetic losses (e.g., hysteresis) Mechanical. - friction at bearings, friction at slip rings. Stray load losses. - due to non-uniform current distribution. Semester II 08/09.")
48
Electrical Engineering Technology
The input mechanical power is the shaft power in the generator given by equation: The power converted from mechanical to electrical form internally is given by The real electric output power of the synchronous generator can be expressed in line and phase quantities as and reactive output power Semester II 08/09

49
Electrical Engineering Technology
In real synchronous machines of any size, the armature resistance RA is more than 10 times smaller than the synchronous reactance XS (Xs >> RA). Therefore, RA can be ignored Semester II 08/09
. Therefore, RA can be ignored. Semester II 08/09.")
50
Electrical Engineering Technology
Synchronous MOTOR Semester II 08/09

51
Electrical Engineering Technology
POWER AND TORQUE Semester II 08/09

52
Electrical Engineering Technology
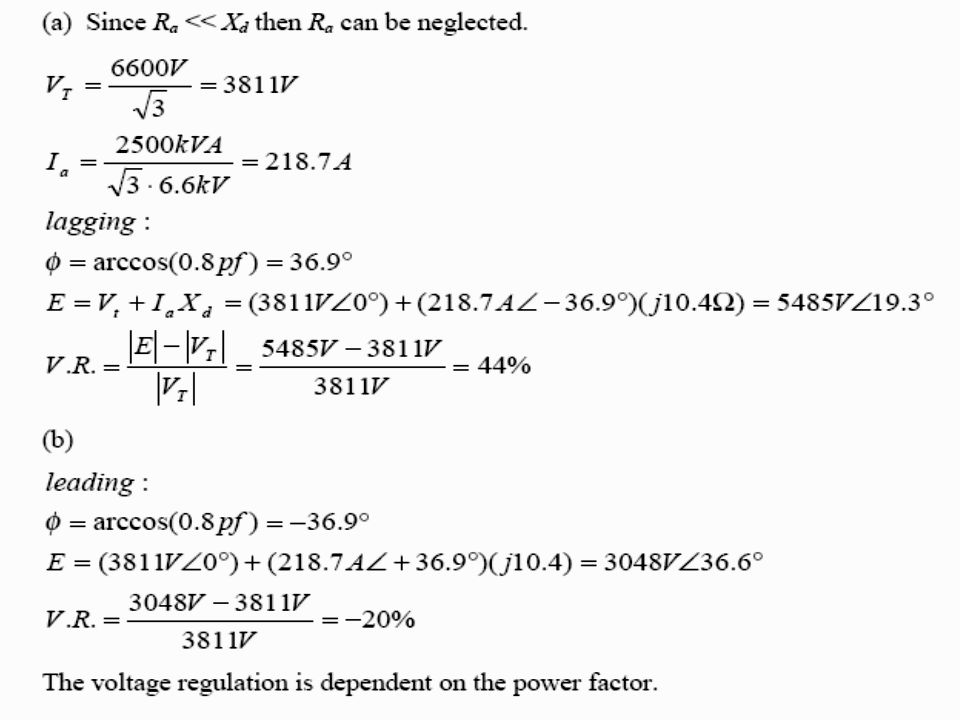
Example Example 3.3 : Synchronous Generator. A three-phase, wye-connected 2500 kVA and 6.6 kV generator operates at full-load. The per-phase armature resistance Ra and the synchronous reactance, Xd, are (0.07+j10.4). Calculate the percent voltage regulation at : (a) 0.8 power-factor lagging (b) 0.8 power-factor leading. Semester II 08/09
. Calculate the percent voltage regulation at : (a) 0.8 power-factor lagging. (b) 0.8 power-factor leading. Semester II 08/09.")
54
Electrical Engineering Technology
END OF CHAPTER 3 Semester II 08/09

Similar presentations

>")
>")
>")















