Download presentation
Presentation is loading. Please wait.

1
Introduction to Robotics Electronics and Robotics Club

2
What Is “Robotics” ? The word robotics is used to collectively define a field in engineering that covers the mimicking of various human characteristics Sound concepts in many engineering disciplines is needed for working in this particular field It finds it’s uses in all aspects of our life

3
What A Robot Can Mean ? An automatic industrial machine replacing the human in hazardous work environment An automatic mobile sweeper machine at a modern home An automatic toy car for a child to play with A machine removing mines in a war field all by itself and many more…

4
What Do We Mean Here ? Here we are aiming at design and prototyping of mobile robots capable of controlled locomotion It may be human controlled or automatic It must be able to perform certain tasks we set for it The task must be achieved within some given limitations

5
Basic Parts Of Our Mobile Robot Locomotion system Power supply system Actuators Sensory devices for feedback Sensor Data processing unit Control system

7
Locomotion System As the name suggests a mobile robot must have a system to make it move This system gives our machine the ability to move forward, backward and take turns It may also provide for climbing up and down The concept of locomotion invariably needs rotational motion e.g. a wheel driven by some power source This involves conversion of electrical energy into mechanical energy, which we can easily achieve using electrical motors

8
Wheeled Locomotion Systems Differential drive Car type drive Skid steer drive Articulated drive Synchronous drive Pivot drive Dual differential drive

9
Power Systems Suitable power source is needed to run the robots Mobile robots are most suitably powered by batteries The weight and energy capacity of the batteries may become the determinative factor of its performance

10
Motors AC Motors : Not used much in robotics Stepper Motors : For controlled rotation DC Motors : Finds extensive general use Servo Motors : DC motor with in built feedback & error compensation

11
Stepper Motor Used for measured rotation Can be held at a particular position of the shaft Ideal for many autonomous robots requiring higher precision

12
Working-Single Excitation

13
Double Point Excitation

14
DC Motors As the name suggests, a motor which uses a DC (Direct Current) power Can run in both directions Speed Controllable
 power Can run in both directions Speed Controllable")
15
DC Motor Working Direction of rotation controlled by polarity of current / voltage Speed of rotation controlled by average energy (power) fed to the motor
 fed to the motor")
16
DC Motor Drivers These are current amplifying circuits A low current control signal is converted into a proportionally higher current signal that can drive the motor Power Transistors can switch high currents. The I Cmax is usually of the order of Amps as compared to small signal transistors which have I Cmax in mA

17
DC Motor Speed Control Circuit Input is the operating voltage & control signal Output is a part of the operating voltage depending upon the control signal

18
Pulse Width Modulation PWM is a technique using which we can modify the duty cycle of a waveform depending upon an input control voltage This forms the backbone of our speed control circuit It can be easily implemented using the popular multipurpose IC 555, used widely for hobby electronics

19
Servo Motors Used to obtain discrete angles Used extensively in robotic arm, humanoid to mimic limb movements Used in environments where dynamic load changes take place. Require PWM, angle of rotation depends on the duty cycle of the pulse.

20
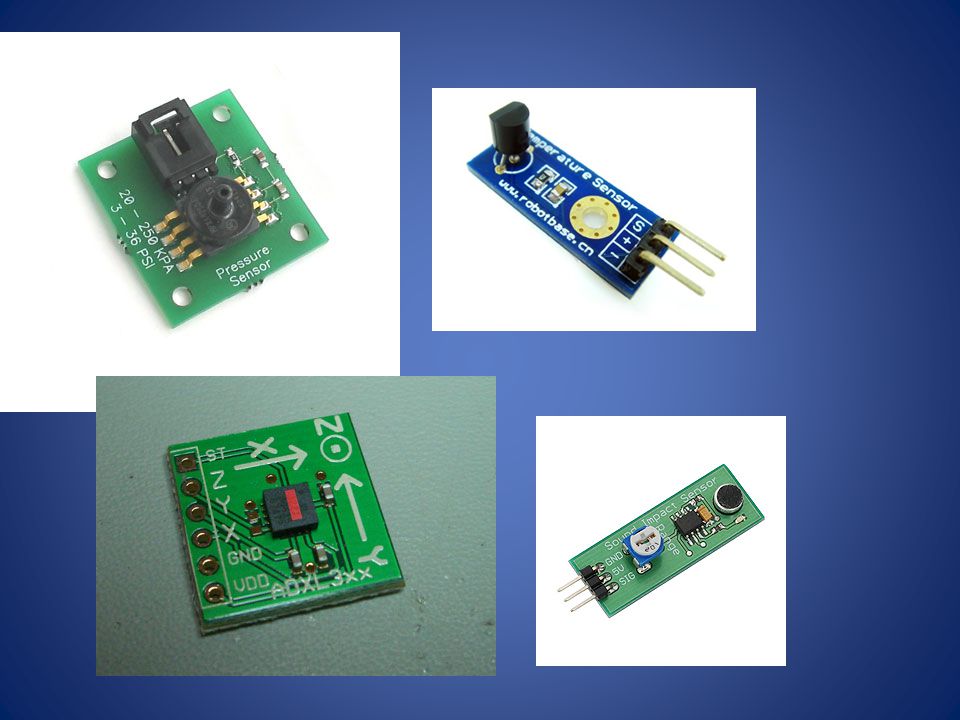
Sensors Sensors are the are the sensory organs of the robot Integral in order to achieve automation Widely used in mobile robots for achieving various tasks Output can be digital or analog Multi-purpose

21
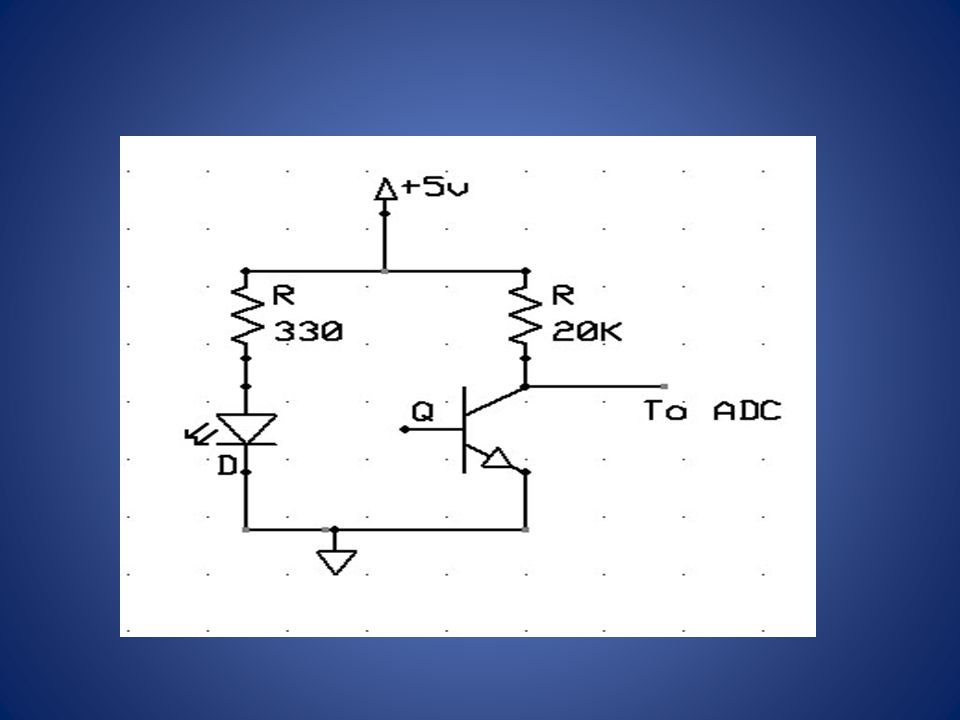
Infra Red Sensor Detects light in infra red region Gives output depending on the amount of light received by its receiver component Comes in digital and analog variety Used for proximity sensation, line following obstacle detection

23
Ultrasonic Sensor Operates in Ultrasonic range Detects reflected wave and sends signal to MCU for distance calculation Used extensively in navigation Also used for mapping and obstacle avoidance.

24
LDR - Light Dependent Resistor Made of cadmium sulphide Resistance between two terminals vary depending on the intensity of light Can be used to differentiate contrast colours

26
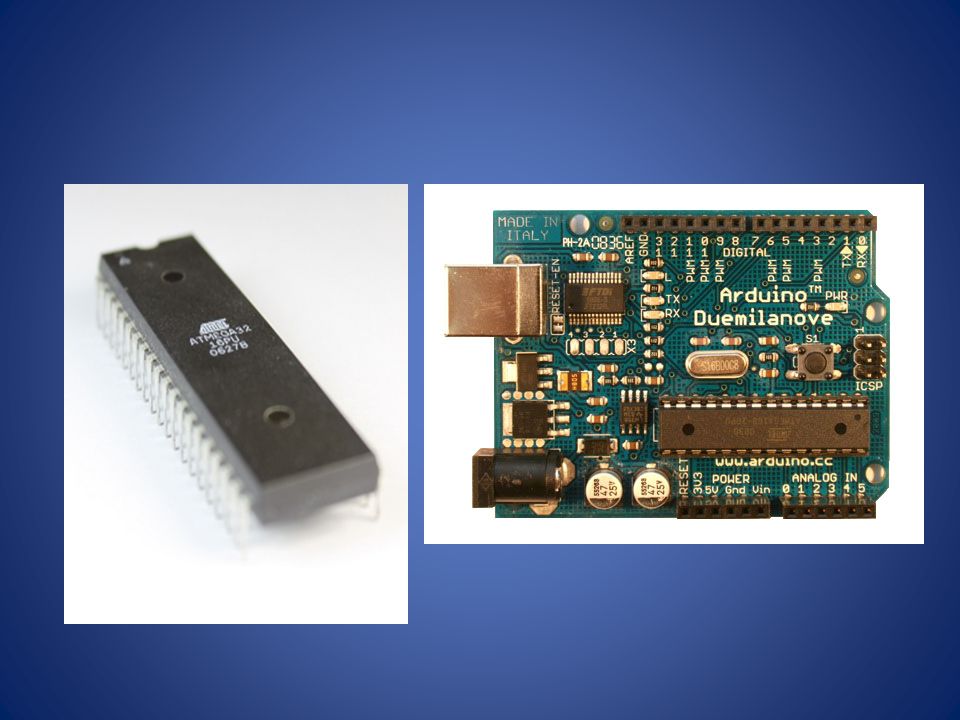
Microcontroller It is the brain of the robot Responsible for all control decision, check conditions and control outputs. Can perform various calculations to aid various tasks. Can be easily interfaced with sensors,motors and other multi purpose devices and I/O devices

28
Other IC’s Besides the microcontroller robots need other IC’s for various tasks. Current amplification Voltage regulation Control Pulse generation

29
Motor driver MCU control signals insufficient to drive motor Motor driver helps MCU maintain control signal and uses External Power to drive motor. Implements H-Bridge circuit to allow for digital control for direction variance

30
DC Motor Direction Control H – Bridge Circuit Diagram S1S1 S3S3 M 12 V CC S2S2 S4S4

31
H – Bridge Working S1S2S3S4Current Direction Effect 10011 to 2Motor spins forward 01102 to 1Motor spins backward 1100-Braking Occurs 0000-Free running

32
555 timer Application as timers and pulse generators Multiple modes Cheap and widespread Used to make various allied circuits like the TSOP obstacle detector.

33
Voltage Regulator LM-78XX series Used to step down voltage to certain value Control fluctuations in circuit and prevents damage to IC’s. Helps increase flexibility in circuit.

34
Communication Sometimes your bot needs a PC for performing complex calculations Effective com devices are required to send data to off board computer RF modules, bluetooth models are used for wireless transfer For wired transfer we have Serial cables and USB

35
Build a Bot

36
Exploring practical methods Brain storming STEPS IN BUILDING A ROBOT Testing and debugging Copyright © ERC, BITS Pilani-Goa Campus Designing Building and Fabrication 51

37
Problem Statement 1 Design a line following robot that autonously follows the black line on the following map.

Similar presentations
















 LED Dimmer Circuit>")



 LED Dimmer Circuit>")