Download presentation
Presentation is loading. Please wait.

1
Chapter 6 Real-Time Embedded Multithreading The Thread – The Essential Component

2
OUTLINE Thread Control Block Summary of Thread Services Execution Overview Thread States Thread Design Thread Internals

3
Thread Control Block (cont.) The Thread Control Block (TCB) is a structure used to maintain the state of a thread during run-time. A TCB can be located anywhere in memory, but it is most common to make the Control Block a global structure by defining it outside the scope of any function.

4
Thread Control Block (cont.) In most case, the developer need not know the contents of the TCB.
 In most case, the developer need not know the contents of the TCB.")
5
Thread Control Block (cont.) Two useful members of the Thread control Block tx_run_count This member contains a count of how many times the thread has been scheduled. tx_state This member contain the state of the associated thread.

6
Thread Control Block (cont.)
")
7
Thread Control Block The develop may inspect the members of the TCB, but is strictly prohibited from modifying them. The value of tx_state for an executing thread is TX_READY.(0x00)
.")
8
Summary of Thread Services (cont.)
")
9
Thread Creation A thread is declared with the TX_THREAD data type and is defined with the tx_thread_create service. Each thread must have its own stack The stack size is crucial, it must be large enougth to accommodate worst-case function call nesting, local variable allocation, and saving the thread’s last execution context

10
Summary of Thread Services (cont.) The predefined minimum stack size constant, TX_MINIMUM_STACK, is probably too small for most application. It is important to design applications that create a reasonable number of thread and that avoid excessive stack usage within threads. Developers should generally avoid recursive algorithms and large local data structure.

11
Summary of Thread Services (cont.)
")
12
What happens when a stack area is too small? An important feature of multithreading is that the same C function can be called from multiple threads. A reentrant function is one that can be safely called while it is already being executed.

13
Summary of Thread Services (cont.)
")
15
If a thread is placed in “completed” state, it cannot be executed again.

16
Summary of Thread Services (cont.) Thread Deletion A thread can be deleted only if it is in a terminated or completed state. This service cannot be called from a thread attempting to delete itself.

17
Summary of Thread Services (cont.)
")
18
It is the responsibility of the application to manage the memory area used by the deleted thread’s stack, which is available after the thread has beendeleted.

19
Summary of Thread Services (cont.) Identify Thread The tx_thread_identify service returns a pointer to the currently executing thread. If this service is called from an ISR, then the return value represents the thread that was running prior to the executing interrupt handler. My_thread_ptr = tx_thread_identify();
;.")
20
Summary of Thread Services (cont.) Get Thread Information The tx_thread_info_get service obtain such information about a thread.
 Get Thread Information The tx_thread_info_get service obtain such information about a thread.")
21
Summary of Thread Services (cont.)
")
22
Preemption-Threshold Change The service tx_thread_preemption_change changes the preemption-thres_hold of an existing thread.

23
Summary of Thread Services (cont.)
")
25
Priority Change When this service is called, the preemption- threshold of the specified thread is automatically set to the new priority.

26
Summary of Thread Services (cont.)
")
28
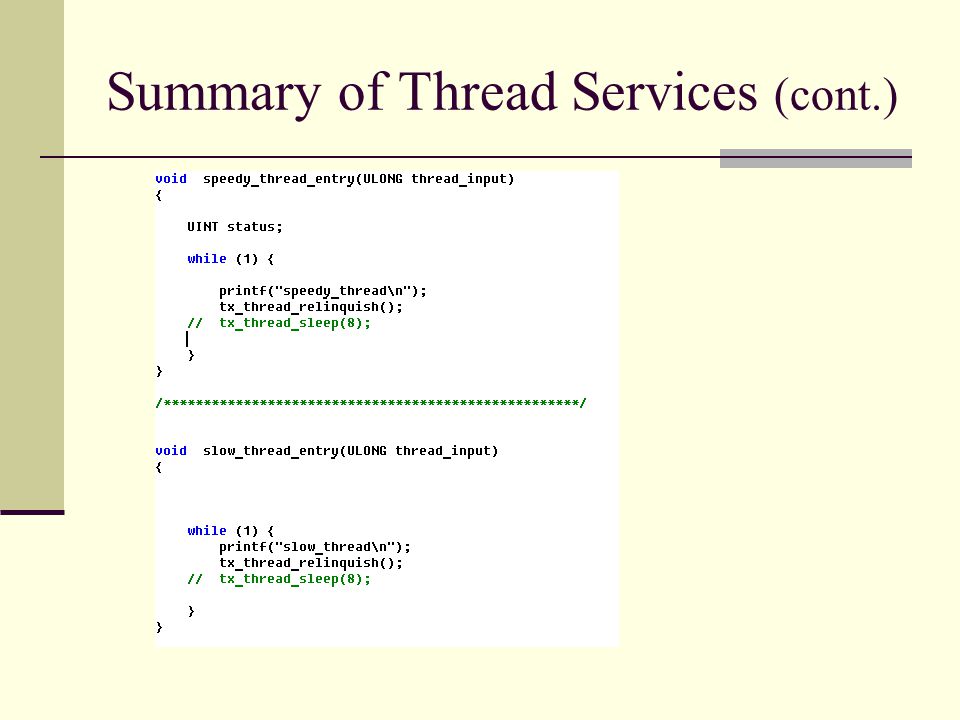
Relinquish A thread may voluntarily relinquish control to another thread by using the tx_thread_relinquish service.

29
Summary of Thread Services (cont.) Speedy_thread 5,5 slow_thread 10,10
 Speedy_thread 5,5 slow_thread 10,10")
30
Summary of Thread Services (cont.)
")
31
Speedy 5,5 Slow 10,10

32
Summary of Thread Services (cont.)
")
35
Resume Thread Execution When a thread is created with the TX_DONT_START option, it is placed in a suspended state. When a thread is suspended because of a call to tx_thread_suspend, it is also placed in a suspended state. The only way such threads can be resumed is when another thread calls the tx_thread_resume service.

36
Summary of Thread Services (cont.)
")
38
Thread Sleep On some occasions, a thread needs to be suspended for a specific amount of time. This is achieved with the tx_thread_sleep service, which causes the calling thread to suspend for the specified number of timer- ticks Status = tx_thread_sleep(100)
.")
39
Summary of Thread Services (cont.) Suspend thread Execution A specified thread can be suspended by calling the tx_thread_suspend service. A thread can suspend itself, it can suspend another thread, or it can be suspended by another thread. This type of suspension is called unconditional suspension. Condition suspension – in which a thread is suspended because it is waiting for a resource that is not available, or a thread is sleeping for a specific period of time.

40
Summary of Thread Services (cont.) If the specified thread is already suspended conditionally, the unconditional suspension is held internally until the prior suspension is lifted. When the prior suspension is lifted, the unconditional suspension of the specified thread is then performed.

41
Summary of Thread Services (cont.)
")
43
Terminate Application Thread This service terminates the specified application thread, regardless of whether or not that thread is currently suspended. A terminated thread cannot be executed again. If you need to execute a terminated thread, then you must delete it and then create it again.

44
Summary of Thread Services (cont.)
")
46
Time-Slice Change This service permits a thread to change its own time-slice or that of another thread. Note that if a preemption-threshold has been specified, then time-slicing for that thread is disabled.

47
Summary of Thread Services (cont.)
")
49
Abort Thread suspension This service aborts sleep or any wait-related suspension of the specified thead. This service does not release explicit suspension that is made by the tx_thread_suspend service.

50
Summary of Thread Services (cont.)
")
51
Summary of Thread Services

52
Execution Overview (cont.) There are four types of program execution within a threadX aplication: initialization, thread execution, interrupt service routines(ISRs), and application timers.
 There are four types of program execution within a threadX aplication: initialization, thread execution, interrupt service routines(ISRs), and application timers.")
53
Execution Overview (cont.)
")
54
Initialization includes all program execution between processor reset and the entry point of the thread scheduling loop. The scheduling loop looks for an application thread that is ready for execution. When a ready thread is found, ThreadX transfer control to it. Without interrupts it would be extremely difficult to respond to changer in the external world in a timely manner.

55
Execution Overview What happen when an interrupt occurs? Interrupt may also occur inside an executing ISR or an application timer. Application timers are very similar to ISRs, except actual hardware implementation is hidden from the application. Like ISRs, application timers most often interrupt thread execution. Unlike ISRs, application timers cannot interrupt each other

56
Thread States

57
Thread Design (cont.) Minimize the number of thread in the application system Choose priorities carefully Minimize the number of priorities Consider preemption-threshold Consider priority inheritance when mutexes are employed Consider round-robin scheduling Consider time-slicing
 Minimize the number of thread in the application system Choose priorities carefully Minimize the number of priorities Consider preemption-threshold Consider priority inheritance when mutexes are employed Consider round-robin scheduling Consider time-slicing")
58
Thread Design (cont.) Minimize the number of thread in the application system The number of threads in an application significantly affects the amount of system overhead.
 Minimize the number of thread in the application system The number of threads in an application significantly affects the amount of system overhead.")
59
Thread Design (cont.) Choose priorities carefully Misuse of thread priorities can starve other thread, create priority inversion, reduce processing bandwidth, and make the application’s run-time behavior difficult to understand.
 Choose priorities carefully Misuse of thread priorities can starve other thread, create priority inversion, reduce processing bandwidth, and make the application’s run-time behavior difficult to understand.")
60
Thread Design (cont.) Minimize the number of priorities An application that has many different thread priorities inherently requires more system overhead than one with a smaller number of priorities. If distinct priorities for these thread are required, then the ThreadX preemption- threshold mechanism can prevent these extra context switches.

61
Thread Design (cont.) Consider preemption-threshold There are three primary methods of preventing priority inversion in ThreadX. First, the developer can select application priorities and design run-time behavior in a manner that prevents the priority inversion problem Second, lower-priority threads can utilize preemption-threshold to block preemption from intermediate threads while they share resources with higher-priority threads.

62
Thread Design (cont.) Finally, threads using ThreadX mutex objects to protect system resources may utilize the optional mutex priority inheritance to eliminate nondeterministic priority inversion.
 Finally, threads using ThreadX mutex objects to protect system resources may utilize the optional mutex priority inheritance to eliminate nondeterministic priority inversion.")
63
Thread Design (cont.) Consider Priority Inheritance Note that priority inheritance is available only with a mutex but not with a counting semaphore.
 Consider Priority Inheritance Note that priority inheritance is available only with a mutex but not with a counting semaphore.")
64
Thread Design (cont.) Consider Round-Robin Scheduling ThreadX supports round-robin scheduling of multiple thread that have the same priority. This is accomplished through cooperative calls to the tx_thread_relinquish service.

65
Thread Design Consider Time-Slicing Time-slicing provides another form of round- robin scheduling for threads with the same priority.

66
Thread Internals

Similar presentations

















 Lecture 3 Processes phones off (please)>")



: Selects a process from the ready queue.>")


 Spring 2012(Week 8). Thread Status. Synchronization in Shared Memory Programming(Java threads ) ◦ Locks ◦ Barriars.>")

