Download presentation
Presentation is loading. Please wait.

1
INDUCTION MOTOR steady-state model
SEE 3433 MESIN ELEKTRIK INDUCTION MOTOR steady-state model

2
Stator – 3-phase winding Rotor – squirrel cage / wound
Construction a b b’ c’ c a’ 120o Stator windings of practical machines are distributed Coil sides span can be less than 180o – short-pitch or fractional-pitch or chorded winding If rotor is wound, its winding the same as stator Stator – 3-phase winding Rotor – squirrel cage / wound

4
Construction Single N turn coil carrying current i
Spans 180o elec Permeability of iron >> o → all MMF drop appear in airgap a a’ /2 -/2 - Ni / 2 -Ni / 2

5
Construction Distributed winding
– coils are distributed in several slots Nc for each slot MMF closer to sinusoidal - less harmonic contents /2 -/2 - (3Nci)/2 (Nci)/2
/2. (Nci)/2.")
6
Construction The harmonics in the mmf can be further reduced by increasing the number of slots: e.g. winding of a phase are placed in 12 slots:

7
Construction In order to obtain a truly sinusoidal mmf in the airgap: the number of slots has to infinitely large conductors in slots are sinusoidally distributed In practice, the number of slots are limited & it is a lot easier to place the same number of conductors in a slot

8
Phase a – sinusoidal distributed winding
Air–gap mmf F() 2
 2")
9
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF t i(t) This is the excitation current which is sinusoidal with time F()
 in a phase produces space sinusoidal standing wave MMF. t. i(t) This is the excitation current which is sinusoidal with time. F() ")
10
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF t i(t) F() t = 0
 in a phase produces space sinusoidal standing wave MMF. t. i(t) F() t = 0. ")
11
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t1 F() t = t1 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t1. F() t = t1. 2 ")
12
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t2 F() t = t2 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t2. F() t = t2. 2 ")
13
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t3 F() t = t3 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t3. F() t = t3. 2 ")
14
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t4 F() t = t4 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t4. F() t = t4. 2 ")
15
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t5 F() t = t5 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t5. F() t = t5. 2 ")
16
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t6 F() t = t6 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t6. F() t = t6. 2 ")
17
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t7 F() t = t7 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t7. F() t = t7. 2 ")
18
Sinusoidal winding for each phase produces space sinusoidal MMF and flux
Sinusoidal current excitation (with frequency s) in a phase produces space sinusoidal standing wave MMF i(t) t t8 F() t = t8 2
 in a phase produces space sinusoidal standing wave MMF. i(t) t. t8. F() t = t8. 2 ")
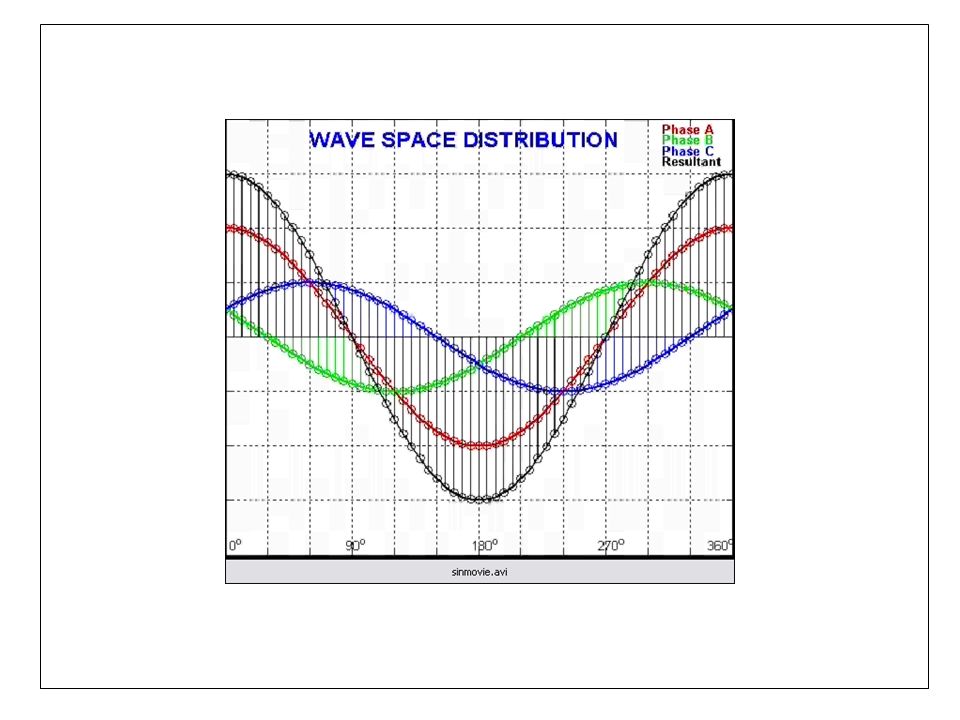
19
Combination of 3 standing waves resulted in ROTATING MMF wave

21
Frequency of rotation is given by:
p – number of poles f – supply frequency known as synchronous frequency

22
Rotating flux induced:
Emf in stator winding (known as back emf) Emf in rotor winding Rotor flux rotating at synchronous frequency Rotor current interact with flux to produce torque Rotor ALWAYS rotate at frequency less than synchronous, i.e. at slip speed: sl = s – r Ratio between slip speed and synchronous speed known as slip
 Emf in rotor winding. Rotor flux rotating at synchronous frequency. Rotor current interact with flux to produce torque. Rotor ALWAYS rotate at frequency less than synchronous, i.e. at slip speed: sl = s – r. Ratio between slip speed and synchronous speed known as slip.")
23
Induced voltage Flux density distribution in airgap: Bmaxcos
Flux per pole: = 2 Bmaxl r Sinusoidally distributed flux rotates at s and induced voltage in the phase coils Maximum flux links phase a when t = 0. No flux links phase a when t = 90o

24
Induced voltage a flux linkage of phase a a = N p cos(t)
By Faraday’s law, induced voltage in a phase coil aa’ is Maximum flux links phase a when t = 0. No flux links phase a when t = 90o

25
Induced voltage In actual machine with distributed and short-pitch windinds induced voltage is LESS than this by a winding factor Kw

26
Stator phase voltage equation:
Vs = Rs Is + j(2f)LlsIs + Eag Eag – airgap voltage or back emf (Erms derive previously) Eag = k f ag Rotor phase voltage equation: Er = Rr Ir + js(2f)Llr Er – induced emf in rotor circuit Er /s = (Rr / s) Ir + j(2f)Llr
LlsIs + Eag. Eag – airgap voltage or back emf (Erms derive previously) Eag = k f ag. Rotor phase voltage equation: Er = Rr Ir + js(2f)Llr. Er – induced emf in rotor circuit. Er /s = (Rr / s) Ir + j(2f)Llr.")
27
Per–phase equivalent circuit
Llr Lls Ir Rs + Vs – + Eag – + Er/s – Is Lm Rr/s Im Rs – stator winding resistance Rr – rotor winding resistance Lls – stator leakage inductance Llr – rotor leakage inductance Lm – mutual inductance s – slip

28
We know Eg and Er related by
Where a is the winding turn ratio = N1/N2 The rotor parameters referred to stator are: rotor voltage equation becomes Eag = (Rr’ / s) Ir’ + j(2f)Llr’ Ir’
 Ir’ + j(2f)Llr’ Ir’")
29
Per–phase equivalent circuit
Rr’/s + Vs – Rs Lls Llr’ Eag Is Ir’ Im Lm Rs – stator winding resistance Rr’ – rotor winding resistance referred to stator Lls – stator leakage inductance Llr’ – rotor leakage inductance referred to stator Lm – mutual inductance Ir’ – rotor current referred to stator

30
Power and Torque Power is transferred from stator to rotor via air–gap, known as airgap power Lost in rotor winding Converted to mechanical power = (1–s)Pag= Pm
Pag= Pm.")
31
Mechanical power, Pm = Tem r
Power and Torque Mechanical power, Pm = Tem r But, ss = s - r r = (1-s)s Pag = Tem s Therefore torque is given by:
s. Pag = Tem s. Therefore torque is given by:")
32
Power and Torque This torque expression is derived based on approximate equivalent circuit A more accurate method is to use Thevenin equivalent circuit:

33
Power and Torque sTm Tem Pull out Torque (Tmax) Trated r
rated syn sTm s

34
Steady state performance
The steady state performance can be calculated from equivalent circuit, e.g. using Matlab Rr’/s + Vs – Rs Lls Llr’ Eag Is Ir’ Im Lm

35
Steady state performance
Rr’/s + Vs – Rs Lls Llr’ Eag Is Ir’ Im Lm e.g. 3–phase squirrel cage IM V = 460 V Rs= 0.25 Rr=0.2 Lr = Ls = 0.5/(2*pi*50) Lm=30/(2*pi*50) f = 50Hz p = 4
 Lm=30/(2*pi*50) f = 50Hz p = 4.")
36
Steady state performance

37
Steady state performance

38
Steady state performance

Similar presentations


>")
>")
?>")















