Download presentation
Presentation is loading. Please wait.

2
Nice, 17/18 December 2001 Autonomous mapping of natural fields using Random Closed Set Models Stefan Rolfes, Maria Joao Rendas rolfes,rendas@i3s.unice.fr Laboratoire I3S, CNRS, UNSA Sophia Antipolis, France

3
Nice, 17/18 December 2001 Outline Introduction Habitat mapping Representation using RCS models Navigation using RCS maps Simulation results Conclusion

4
Nice, 17/18 December 2001 Goals: evaluate the total amount of living/dead maerl in Rousey Sound (Orkney Islands, Scotland) characterise the spatial distribution of maerl Platform: Phantom Sensor: vision Maerl mapping
 characterise the spatial distribution of maerl Platform: Phantom Sensor: vision Maerl mapping")
5
Nice, 17/18 December 2001 Individual delimitation of each maerl patch is impossible Approach: (1) Learn the statistical characteristics of the field: the distribution of the patches sizes the distribution of their shapes how they are spatially scattered (2) Relate the local distribution to the site’s characteristics (depth, currents, slope, bottom type) whenever this information is available. Result: A “statistical map” of the area surveyed and a “statistical model” of its properties. enables determination of the expected total amount of maerl provides the basis for extrapolating the local observations to other (unobserved) areas. Maerl mapping
 areas. Maerl mapping.")
6
Nice, 17/18 December 2001 image segmentationregion classificationstatistical characterisation raw images expert knowledge (model) (labels)(homogenous regions) model types mapping robot position map post-processing total amount of maerl relation of maerl distribution to geophysical parameters (shape, size and spatial distribution) Data processing
 (labels)(homogenous regions) model types mapping robot position map post-processing total amount of maerl relation of maerl distribution to geophysical parameters (shape, size and spatial distribution) Data processing")
7
Nice, 17/18 December 2001 Generalisation of K-means clustering algorithm in distribution space Image Segmentation: approach

8
Nice, 17/18 December 2001 Goal: find the “homogeneous” regions of the image Approach: model the set of pixels in each neighbourhood of the image as iid random variables discriminate distinct regions as realisations of distinct random variables, two sequences Hypotheses: H 0 : H 1 : Statistical Test

9
Nice, 17/18 December 2001 Kullback-Leibler divergence type of the sequence x i (n) mixture of 1 and 2. Optimal test

10
Nice, 17/18 December 2001 K-means (Lloyd) algorithm
 algorithm")
11
Nice, 17/18 December 2001 Iterate 1) 2) Geometrical view
 2) Geometrical view")
12
Nice, 17/18 December 2001 Start with and randomly “split” h 0 in two histograms h 1 (0) and h 2 (0) such that Randomly generate find that minimizes where Replace Euclidean distance (between points) by Kullback divergence (between histograms)
 and h 2 (0) such that Randomly generate find that minimizes where Replace Euclidean distance (between points) by Kullback divergence (between histograms)")
13
Nice, 17/18 December 2001 Test “homogeneity” of the classes found by testing the distribution of the Kullback-Leibler distances of its members with respect to against the exponential distribution (theoretical dist. – type theory) Since is the average value of the exponential distribution, we use and test the values of Determination of the number of classes
 Since is the average value of the exponential distribution, we use and test the values of Determination of the number of classes.")
14
Nice, 17/18 December 2001 segmented image (1) original image 1 Examples
 original image 1 Examples")
15
Nice, 17/18 December 2001 050100150200250300 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 optimal classes (2) all image class 1 class 2 classes histograms (3) 050100150200250300 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 class 1 class 2 class 3
 all image class 1 class 2 classes histograms (3) class 1 class 2 class 3")
16
Nice, 17/18 December 2001 original image (2)
")
17
Nice, 17/18 December 2001 original image (3)segmented image (3)
segmented image (3)")
18
Nice, 17/18 December 2001

20
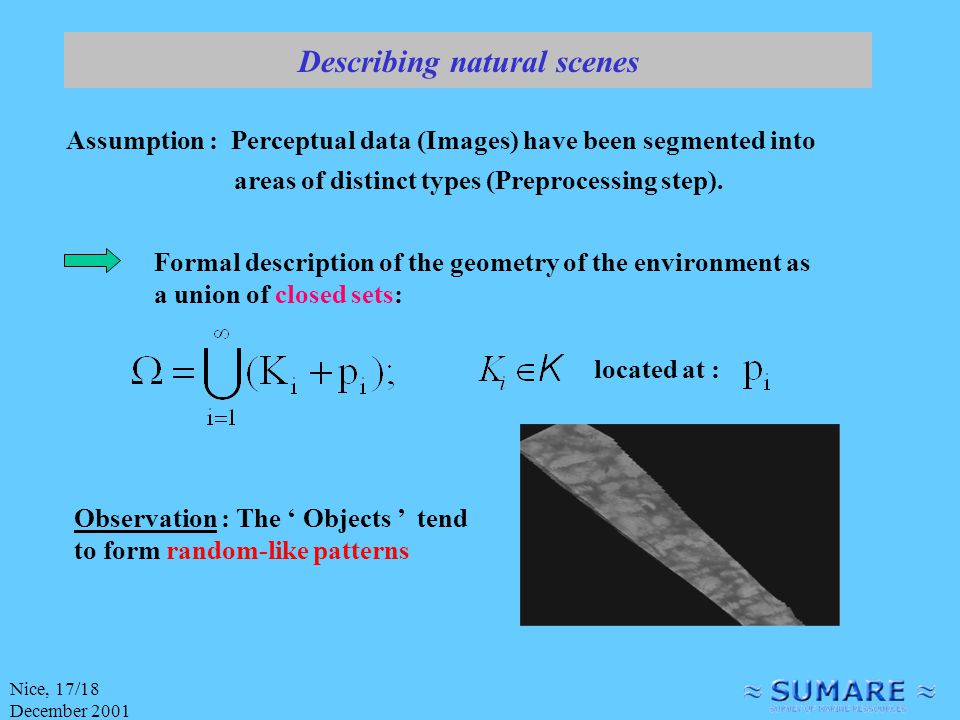
Describing natural scenes Formal description of the geometry of the environment as a union of closed sets: Observation : The ‘ Objects ’ tend to form random-like patterns located at : Assumption : Perceptual data (Images) have been segmented into areas of distinct types (Preprocessing step).
 have been segmented into areas of distinct types (Preprocessing step).")
21
Nice, 17/18 December 2001 Modelisation as Random Closed Set Each model is defined by a parameter vector Family of models : Doubly stochastic process : 1) Random point process (germ process) describes spatial distribution of objects 2) Shape process (grain process) determines the geometry of the objects
 Random point process (germ process) describes spatial distribution of objects 2) Shape process (grain process) determines the geometry of the objects")
22
Nice, 17/18 December 2001 Examples of Random Closed Sets Uniform distribution Cluster process Regular structures Non isotropic distribution

23
Nice, 17/18 December 2001 Map of the environment Segmentation of the workspace : Non isotropic isotropic Map of the environment

24
Nice, 17/18 December 2001 Perceptual observations : Hitting capacities Knowledge of the hitting capacities for all compact sets is equivalent to knowledge of the RCS model determined by Hit Miss Analytical expression for Boolean models :

25
Nice, 17/18 December 2001 Distribution of hitting capacities Local observations in an observation window W induce a distribution on the hitting capacities for stationary RCS models Its characterization is important for : Mapping (segmentation of the workspace) Localization (Bayesian approach) Requires explicit detection of model change
 Localization (Bayesian approach) Requires explicit detection of model change")
26
Nice, 17/18 December 2001 Conclusions We proposed a novel environment description by RCS models Proposal of a new image segmentation algorithm (adaptively learns the number of classes) – Methods for detection of model changes (region boundaries) – Validation with real data Future work the workspace (boundary tracking)
 – Methods for detection of model changes (region boundaries) – Validation with real data Future work the workspace (boundary tracking)")
Similar presentations













 Shengcai Liao, Guoying Zhao, Vili Kellokumpu,>")



 Heriot Watt University Old Academy.>")


