Download presentation
Presentation is loading. Please wait.

1
GPS-Free Node Localization in Mobile Wireless Sensor Networks H¨useyin Akcan 1, Vassil Kriakov 1,Herv´e Br¨onnimann 1, Alex Delis 2 1 CIS Department Polytechnic University 2 Dept. of Informatics & Telecom. University of Athens ACM MobiDE’06

2
Outline Introductions Localization Algorithm Simulations Conclusion

3
Introduction Wireless sensor networks are composed of hundreds sensor nodes. Sensor nodes are capable of measuring various physical values. are communicating with each other and organizing themselves to achieve mission. find routing path by their relation between each other.

4
Introduction Many applications require sensor network mobility in environments. Some place there are not deployed sensor. Ex. The scene of a fire. Emergency incident.

5
Introduction Motivation preserve network formation during directed mobility in mobile sensor networks. Goals provide directional neighbor localization in a network wide coordinate system. work under fairly large motion and distance measurement errors. unaffect by the speed of nodes. work for any network size. support a stable network in mobility problems.

6
Introduction Explore accident location

7
Introduction

8
Assumptions in this paper Each mobile sensor node has a compass pointing North can measure the distance to their neighbors using (TOA). allows each node to move a specific distance in a specific direction. has no additional positioning equipment or infrastructure is required. Actuator, compass and distance measurements are subject to errors caused by various real world disturbances.

9
Localization Algorithm Core localization algorithm Verification algorithm Exceptional configurations

10
Localization Algorithm d1d1 d2d2 d1d1 T=2 T=1 T=3

11
α2α2 V2V2 v1v1 Localization Algorithm Core localization algorithm A (X 0, Y 0 ) B d1d1 A B d2d2 α1α1
 B d1d1 A B d2d2 α1α1")
12
α2α2 V2V2 v1v1 Localization Algorithm A (X 0, Y 0 ) B d1d1 A B d2d2 α1α1 (X 1, Y 1 )
 B d1d1 A B d2d2 α1α1 (X 1, Y 1 )")
13
Localization Algorithm α2α2 V2V2 v1v1 A (X 0, Y 0 ) B d1d1 A B d2d2 α1α1 (X 1, Y 1 ) (X 2, Y 2 ) (X 3, Y 3 )
 B d1d1 A B d2d2 α1α1 (X 1, Y 1 ) (X 2, Y 2 ) (X 3, Y 3 )")
14
Localization Algorithm

18
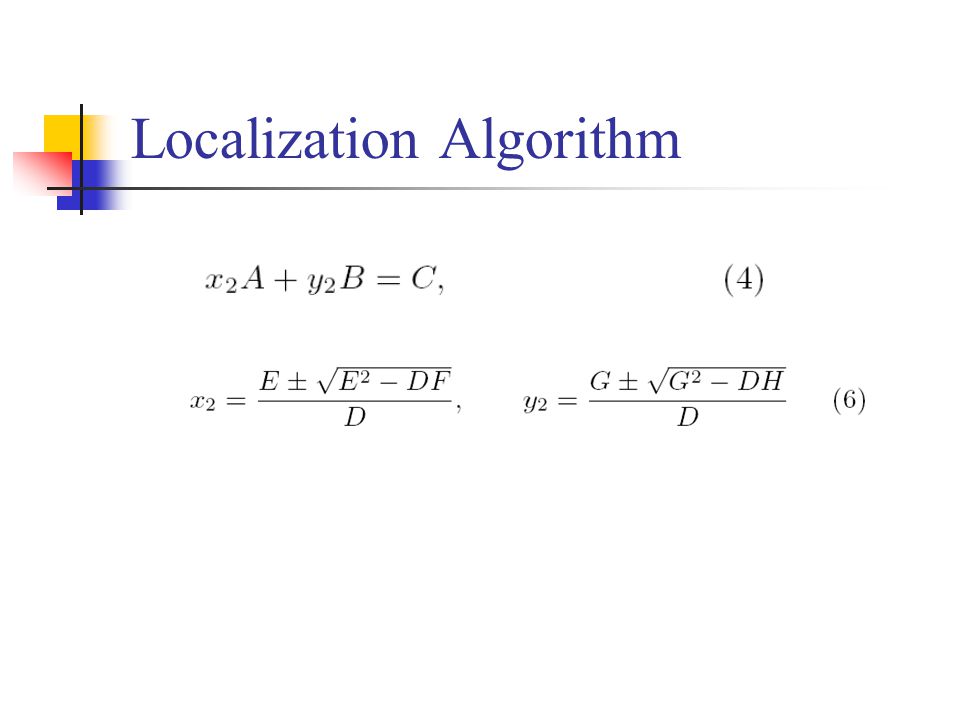
CoreLocalization(n 1, n 2, v 1,α 1 ) 1: d 1 inter-distance(n 1, n 2 ) 2: Move node n1 by v 1 and α 1 3: d 2 inter-distance(n 1, n 2 ) 4: Retrieve v 2 and α 2 from n 2 5: Calculate positions of n 2 using equations (4),(5) and (6)
 1: d 1 inter-distance(n 1, n 2 ) 2: Move node n1 by v 1 and α 1 3: d 2 inter-distance(n 1, n 2 ) 4: Retrieve v 2 and α 2 from n 2 5: Calculate positions of n 2 using equations (4),(5) and (6)")
19
Localization Algorithm α2α2 V2V2 v1v1 A (X 0, Y 0 ) B d1d1 A B d2d2 α1α1 (X 1, Y 1 ) (X 2, Y 2 ) (X 3, Y 3 )
 B d1d1 A B d2d2 α1α1 (X 1, Y 1 ) (X 2, Y 2 ) (X 3, Y 3 )")
20
Localization Algorithm Two possible position A B A B A B A B

21
Localization Algorithm Verification (NeighborList NL) 1: for each neighbor pair (m, n) in NL do 2: if m and n are neighbors then 3: d m,n measured inter-distance(m, n) 4: for each position pair {m i, n j | i, j = 1, 2} do 5: Compute Euclidean distance D between m i and n j 6: if D = d m,n then 7: mark m i and n j as exact positions
 1: for each neighbor pair (m, n) in NL do 2: if m and n are neighbors then 3: d m,n measured inter-distance(m, n) 4: for each position pair {m i, n j | i, j = 1, 2} do 5: Compute Euclidean distance D between m i and n j 6: if D = d m,n then 7: mark m i and n j as exact positions")
22
Find d BC which are equal to d3. Localization Algorithm A B A B A B A B C d BC C

23
Localization Algorithm Exceptional configurations If A=0 and B=0 then D=0 A A B B B B

24
Localization Algorithm Exceptional configurations If E 2 -DF<0 or G 2 -DH<0 Node skip this round and make necessary adjustments.

25
Localization Algorithm d1d1 d5d5 d2d2 d3d3 d4d4 T=1 T=2

26
Simulations Environment Compare with absolute position algorithm Sensor radio range 6 100 x 100 area 100 run Each round random speed [0,5) random angle [0,2π)
 random angle [0,2π)")
27
Simulations

28
Random movement

29
Simulations Directed movement

30
Simulations Directed trajectory of nodes performing zig-zag movement.

31
Simulations Absolute positioning algorithm

32
Simulations Our localization algorithm

33
Conclusion In this paper, they are the first GPS-free localization algorithm work on mobile nodes. propose a straightforward and robust algorithm that requires only a single round of node movement to localize all neighbor nodes.

Similar presentations









; Wheeler Ruml (Palo Alto Research Center ); Ying Zhang; Markus Fromherz.>")











