Download presentation
Presentation is loading. Please wait.

1
Margins on Bode plot

2
Margins on Nyquist plot Suppose: Draw Nyquist plot G(jω) & unit circle They intersect at point A Nyquist plot cross neg. real axis at –k

3
Relative stability from margins One of the most widely used methods in determine “how stable the system is” Margins on based on open-loop transfer function’s frequency response Basic rule: –PM>0 and GM>0: closed-loop system stable –PM + Mp 70 –As PM or GM 0: oscillates more –PM=0 and GM=0: sustained oscillation –PM<0: unstable

4
If no wgc, gain never crosses 0dB or 1: –Gain > 1: Closed loop system is unstable. –Gain < 1: Closed loop system is stable unstable G(s)
.")
5
If no wgc, gain never crosses 0dB or 1: –Gain > 1: Closed loop system is unstable. –Gain < 1: Closed loop system is stable stable G(s)
.")
6
Relative stability from margins If there is one wgc and multiple wpc’s all > wgc –PM>0, all GM>0, and closed-loop system is stable If there is one wgc but > one wpc’s –Closed-loop system is stable if margins >0 –PM and GM reduce simultaneously –PM and GM becomes 0 simultaneously, at which case the closed loop system will have sustained oscillation at wgc=wpc

7
Relative stability from margins If there is one wgc, and multiple wpc’s And if system is minimum phase (all zeros in left half plane) And if gain plot is generally decreasing –PM>0, all GM>0: closed-loop system is stable –PM>0, and at wpc right to wgc GM>0: closed- loop system is stable –PM<0, and at wpc right to wgc GM<0: closed- loop system is unstable
 And if gain plot is generally decreasing –PM>0, all GM>0: closed-loop system is stable –PM>0, and at wpc right to wgc GM>0: closed- loop system is stable –PM<0, and at wpc right to wgc GM<0: closed- loop system is unstable")
9
ans = 1.0e+002 * -1.7071 -0.2928 -0.0168 -0.0017 + 0.0083i -0.0017 - 0.0083i All poles negative (in left half plane) Closed loop system is stable
 Closed loop system is stable")
10
Relative stability from margins If there is one wgc, and multiple wpc’s And if system is minimum phase (all zeros in left half plane) And if gain plot is generally decreasing –PM>0, all GM>0: closed-loop system is stable –PM>0, and at wpc right to wgc GM>0: closed- loop system is stable –PM<0, and at wpc right to wgc GM<0: closed- loop system is unstable
 And if gain plot is generally decreasing –PM>0, all GM>0: closed-loop system is stable –PM>0, and at wpc right to wgc GM>0: closed- loop system is stable –PM<0, and at wpc right to wgc GM<0: closed- loop system is unstable")
12
ans = 1.0e+002 * -1.7435 -0.0247 + 0.1925i -0.0247 - 0.1925i -0.1748 -0.0522 Closed loop system poles are all negative System is stable

13
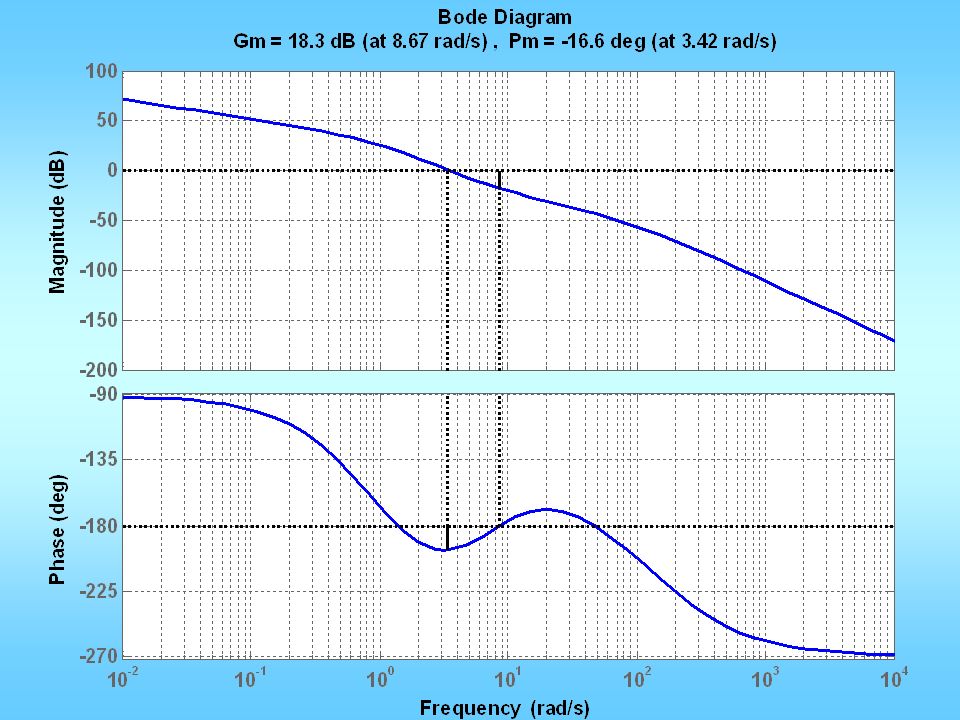
Relative stability from margins If there is one wgc, and multiple wpc’s And if system is minimum phase (all zeros in left half plane) And if gain plot is generally decreasing –PM>0, all GM>0: closed-loop system is stable –PM>0, and at wpc right to wgc GM>0: closed- loop system is stable –PM<0, and at wpc right to wgc GM<0: closed- loop system is unstable
 And if gain plot is generally decreasing –PM>0, all GM>0: closed-loop system is stable –PM>0, and at wpc right to wgc GM>0: closed- loop system is stable –PM<0, and at wpc right to wgc GM<0: closed- loop system is unstable")
15
ans = 1.0e+002 * -1.7082 -0.2888 -0.0310 0.0040 + 0.0341i 0.0040 - 0.0341i Two right half plane poles, unstable

16
Conditionally stable systems Closed-loop stability depends on the overall gain of the system For some gains, the system becomes unstable Be very careful in designing such systems Type 2, or sometimes even type 1, systems with lag control can lead to such Need to make sure for highest gains and lowest gains, the system is stable

17
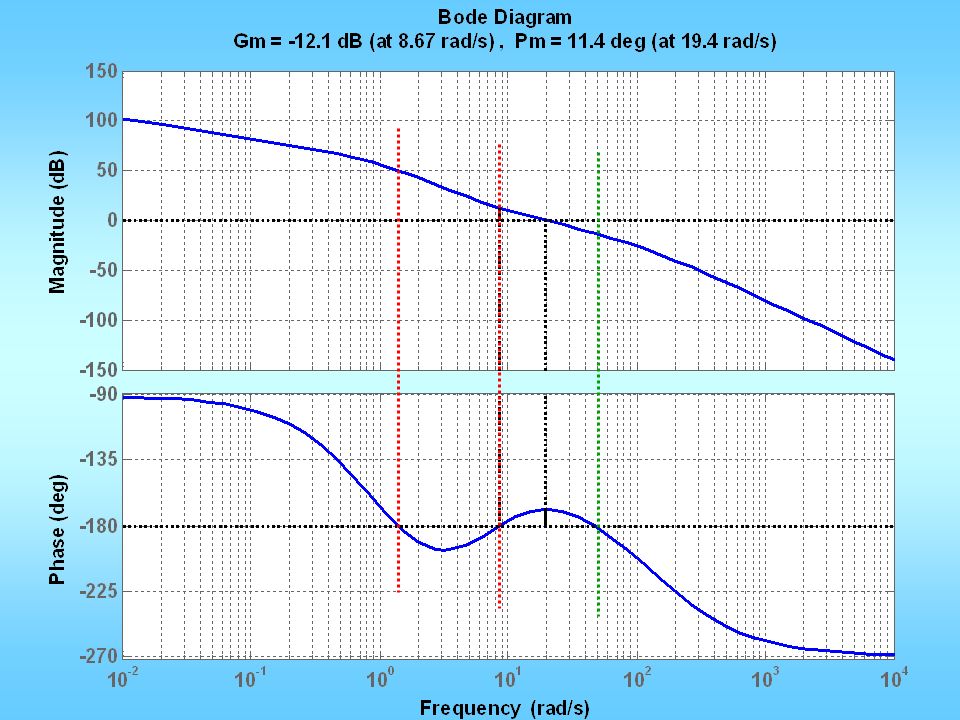
Relative stability from margins If there are multiple wgc’s –Gain plot cannot be generally decreasing –There may be 0, or 1 or multiple wpc’s –If all PM>0: closed-loop system is stable –If one PM<0: closed-loop system is unstable

18
poles = -25.3788 -4.4559 -0.2653 stable

19
Relative stability from margins If there are multiple wgc’s –Gain plot cannot be generally decreasing –There may be 0, or 1 or multiple wpc’s –If all PM>0: closed-loop system is stable –If one PM<0: closed-loop system is unstable

20
poles = 4.7095 +11.5300i 4.7095 -11.5300i -1.1956 -0.3235 Unstable

21
poles = 4.8503 + 7.1833i 4.8503 - 7.1833i 0.3993 -0.1000 Unstable

22
Poles = 28.9627 -4.4026 + 4.5640i -4.4026 - 4.5640i -0.2576 Unstable

23
Limitations of margins Margins can be come very complicated For complicated situations, sign of margins is no longer a reliable indicator of stability In these cases, compute closed loop poles to determine stability If transfer function is not available, use Nyquist plot to determine stability

24
Stability from Nyquist plot The complete Nyquist plot: –Plot G(jω) for ω = 0 + to +∞ –Get complex conjugate of plot, that’s G(jω) for ω = 0 – to –∞ –If G(s) has pole on jω-axis, treat separately –Mark direction of ω increasing –Locate point: –1
 for ω = 0 + to +∞ –Get complex conjugate of plot, that’s G(jω) for ω = 0 – to –∞ –If G(s) has pole on jω-axis, treat separately –Mark direction of ω increasing –Locate point: –1")
26
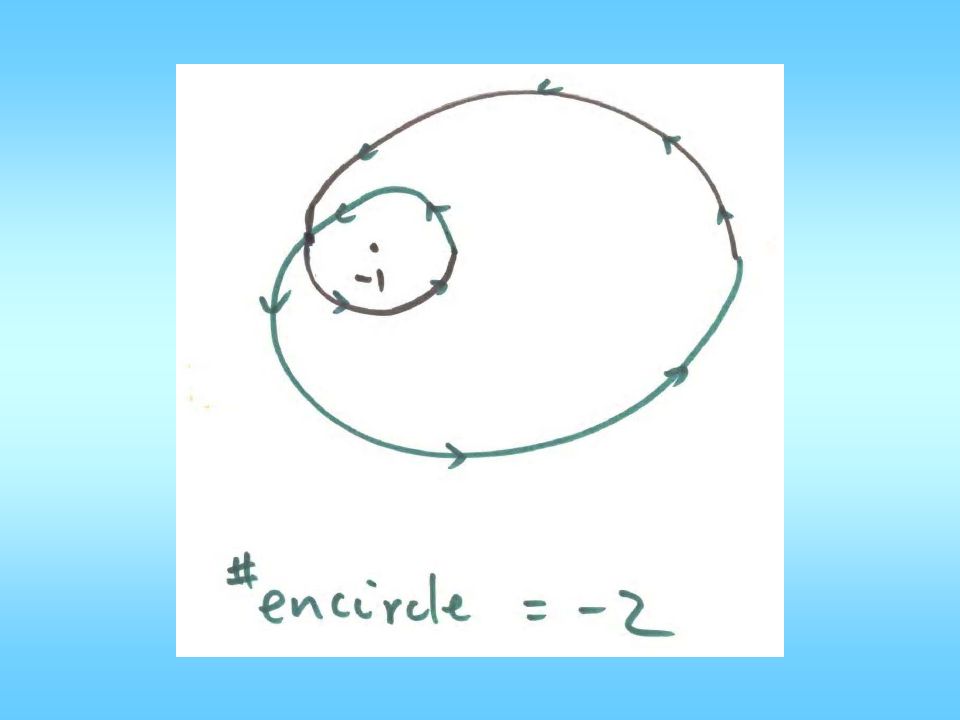
As you follow along the G(jω) curve for one complete cycle, you may “encircle” the –1 point Going around in clock wise direction once is +1 encirclement Counter clock wise direction once is –1 encirclement Encirclement of the -1 point
 curve for one complete cycle, you may encircle the –1 point Going around in clock wise direction once is +1 encirclement Counter clock wise direction once is –1 encirclement Encirclement of the -1 point")
30
# (unstable poles of closed-loop)Z = # (unstable poles of open-loop)P + # encirclementN or: Z = P + N To have closed-loop stable: need Z = 0, i.e. N = –P Nyquist Criterion Theorem

31
That is: G(jω) needs to encircle the “–1” point counter clock wise P times. If open loop is stable to begin with, G(jω) cannot encircle the “–1” point for closed-loop stability In previous example: 1.No encirclement, N = 0. 2.Open-loop stable, P = 0 3.Z = P + N = 0, no unstable poles in closed-loop, stable
 cannot encircle the –1 point for closed-loop stability In previous example: 1.No encirclement, N = 0. 2.Open-loop stable, P = 0 3.Z = P + N = 0, no unstable poles in closed-loop, stable.")
32
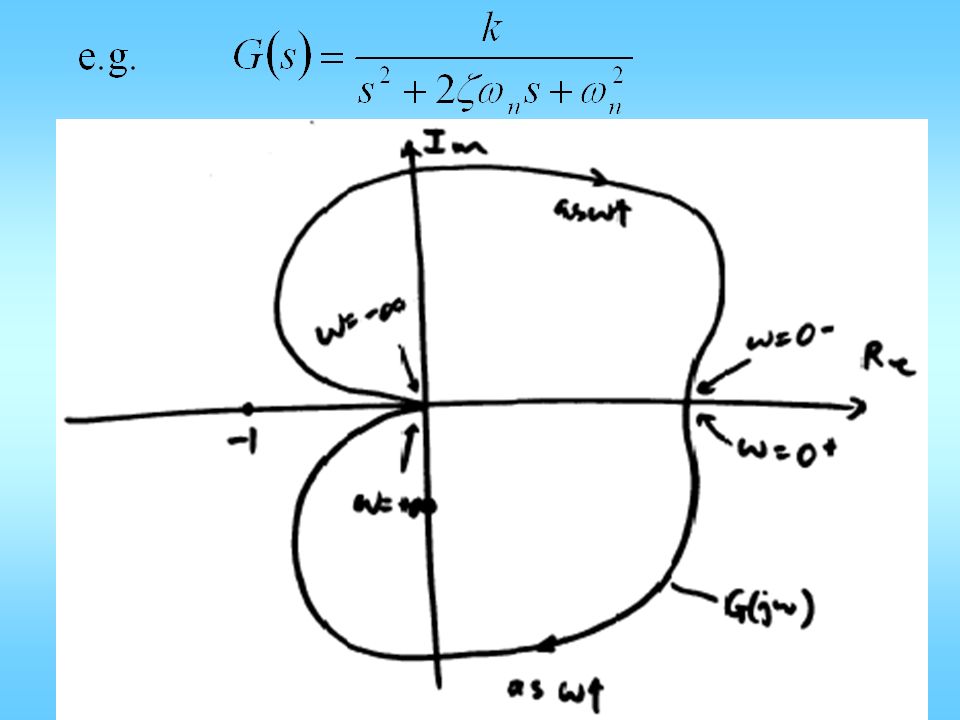
Example:

33
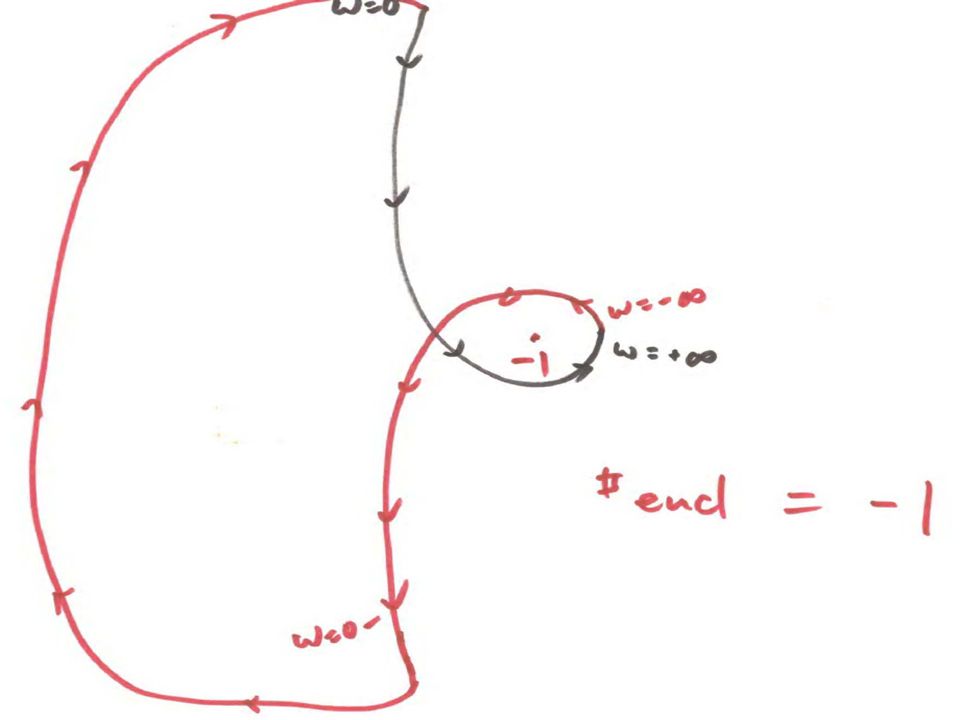
As you move around from ω = –∞ to 0 –, to 0 +, to +∞, you go around “–1” c.c.w. once. # encirclement N = – 1. # unstable pole P = 1

34
i.e. # unstable poles of closed-loop = 0 closed-loop system is stable. Check: c.l. pole at s = –3, stable.

35
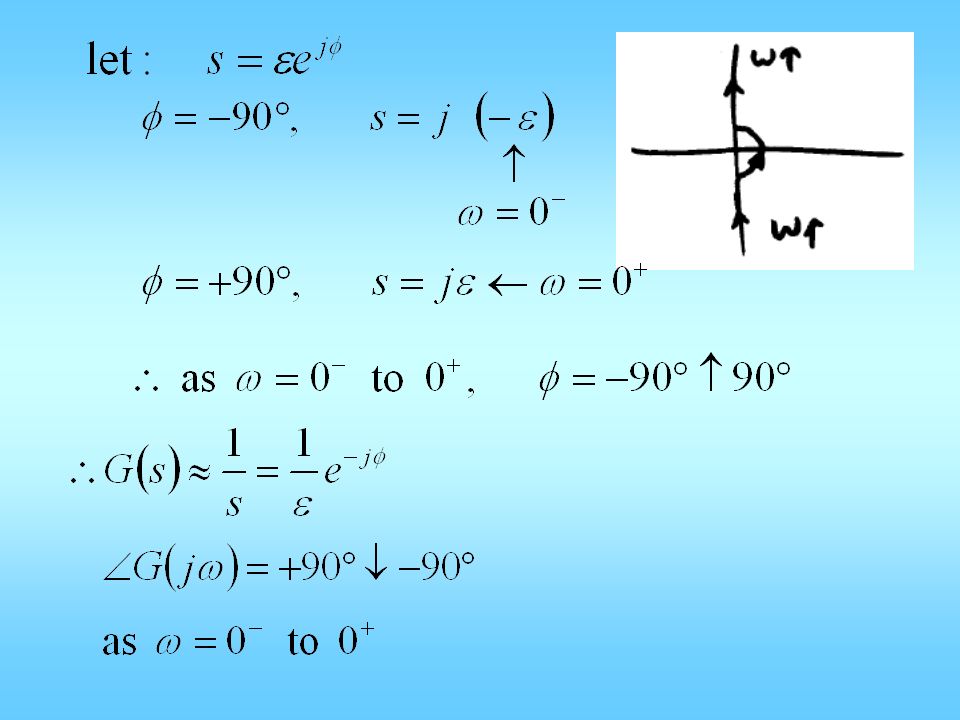
Example: 1.Get G(jω) for ω = 0 + to +∞ 2.Use conjugate to get G(jω) for ω = –∞ to 0 – 3.How to go from ω = 0 – to ω = 0 + ? At ω ≈ 0 :

38
# encirclement N = _____ # open-loop unstable poles P = _____ Z = P + N = ________ = # closed-loop unstable poles. closed-loop stability: _______

39
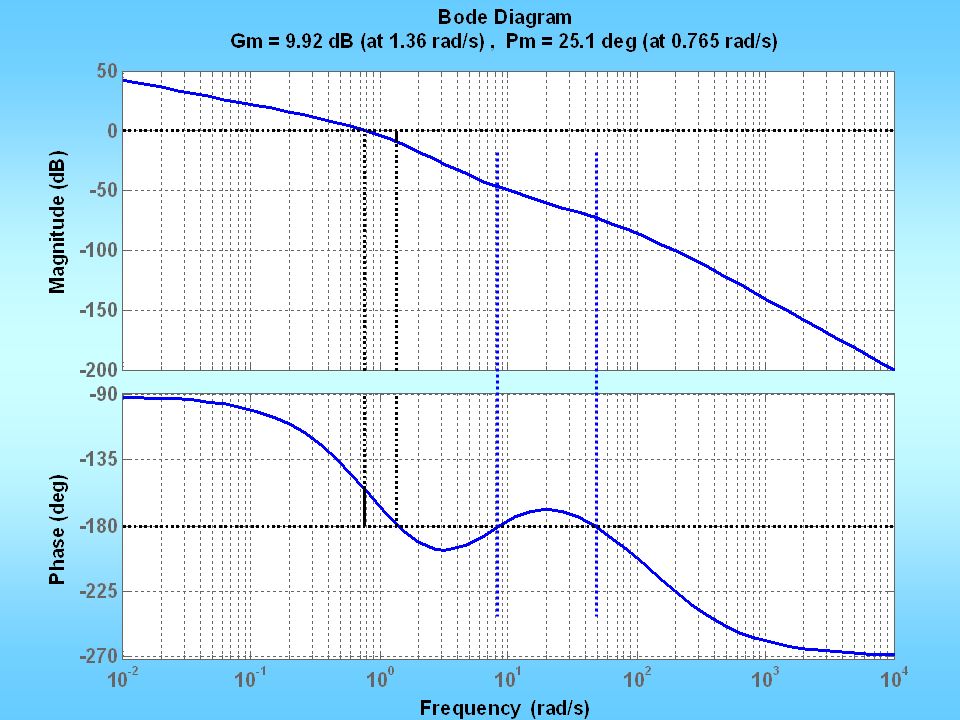
Example: Given: 1.G(s) is stable 2.With K = 1, performed open-loop sinusoidal tests, and G(jω) is on next page Q:1. Find stability margins 2. Find Nyquist criterion to determine closed-loop stability

41
Solution: 1.Where does G(jω) cross the unit circle? ________ Phase margin ≈ ________ Where does G(jω) cross the negative real axis? ________ Gain margin ≈ ________ Is closed-loop system stable with K = 1? ________
 cross the negative real axis. ________ Gain margin ≈ ________ Is closed-loop system stable with K = 1. ________.")
42
Note that the total loop T.F. is KG(s). If K is not = 1, Nyquist plot of KG(s) is a scaling of G(jω). e.g. If K = 2, scale G(jω) by a factor of 2 in all directions. Q: How much can K increase before GM becomes lost? ________ How much can K decrease? ______
 is a scaling of G(jω). e.g. If K = 2, scale G(jω) by a factor of 2 in all directions. Q: How much can K increase before GM becomes lost. ________ How much can K decrease. ______.")
43
Some people say the gain margin is 0 to 5 in this example Q: As K is increased from 1 to 5, GM is lost, what happens to PM? What’s the max PM as K is reduced to 0 and GM becomes ∞?

44
2.To use Nyquist criterion, need complete Nyquist plot. a)Get complex conjugate b)Connect ω = 0 – to ω = 0 + through an infinite circle c)Count # encirclement N d)Apply: Z = P + N o.l. stable,P = _______ Z = _______ c.l. stability: _______
Get complex conjugate b)Connect ω = 0 – to ω = 0 + through an infinite circle c)Count # encirclement N d)Apply: Z = P + N o.l. stable,P = _______ Z = _______ c.l. stability: _______.")
45
Incorrect Correct

46
Example: G(s) stable, P = 0 G(jω) for ω > 0 as given. 1.Get G(jω) for ω < 0 by conjugate 2.Connect ω = 0 – to ω = 0 +. But how?
 for ω < 0 by conjugate 2.Connect ω = 0 – to ω = 0 +. But how .")
47
Choice a) : Where’s “–1” ? # encirclement N = _______ Z = P + N = _______ Make sense? _______ Incorrect

48
Choice b) : Where is “–1” ? # encir. N = _____ Z = P + N = _______ closed-loop stability _______ Correct

49
Note: If G(jω) is along –Re axis to ∞ as ω→0 +, it means G(s) has in it. when s makes a half circle near ω = 0, G(s) makes a full circle near ∞. choice a) is impossible, but choice b) is possible.
 makes a full circle near ∞. choice a) is impossible, but choice b) is possible..")
50
Incorrect

51
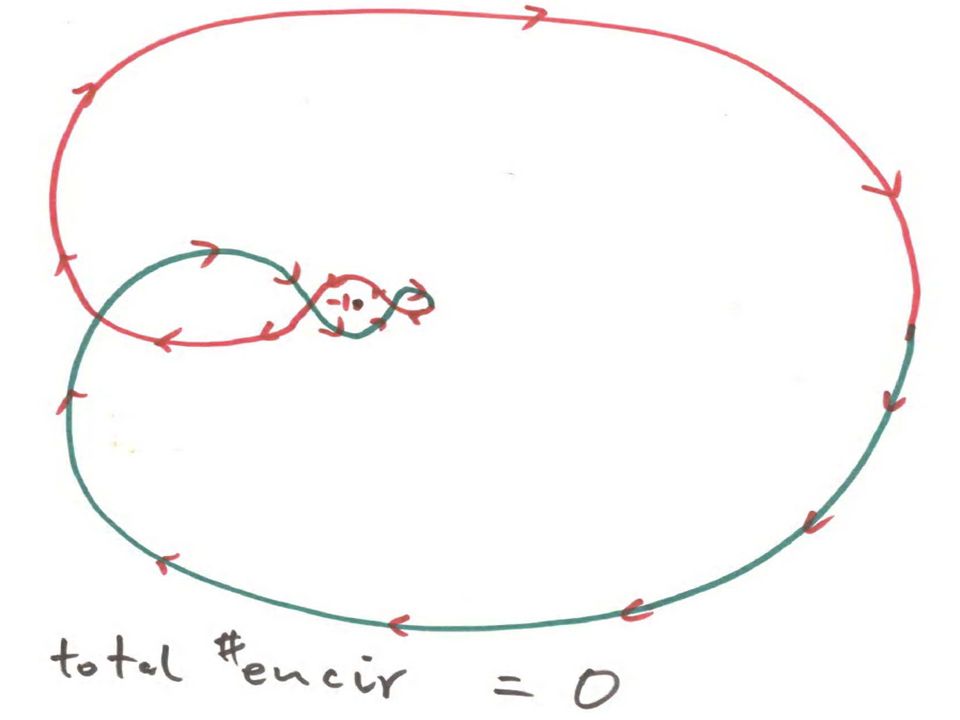
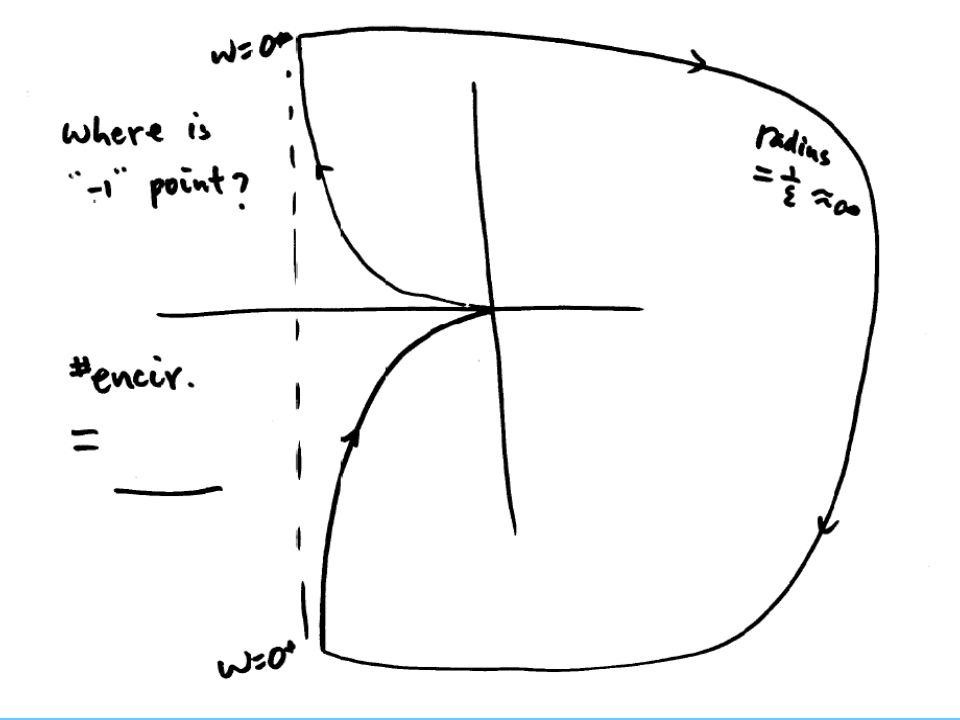
Example:G(s) stable,P = 0 1.Get conjugate for ω < 0 2.Connect ω = 0 – to ω = 0 +. Needs to go one full circle with radius ∞. Two choices.

52
Choice a) : N = 0 Z = P + N = 0 closed-loop stable Incorrect!
 : N = 0 Z = P + N = 0 closed-loop stable Incorrect!")
53
Choice b) : N = 2 Z = P + N = 2 Closed loop has two unstable poles Correct!
 : N = 2 Z = P + N = 2 Closed loop has two unstable poles Correct!")
54
Which way is correct? For stable & non-minimum phase systems,

55
Example: G(s) has one unstable pole P = 1, no unstable zeros 1.Get conjugate 2.Connect ω = 0 – to ω = 0 +. How? One unstable pole/zero If connect in c.c.w.

56
# encirclement N = ? If “–1” is to the left of A i.e.A > –1 thenN = 0 Z = P + N = 1 + 0 = 1 but if a gain is increased, “–1” could be inside,N = –2 Z = P + N = –1 c.c.w. is impossible

57
If connect c.w.: For A > –1 N = ______ Z = P + N = ______ For A < –1 N = ______ Z = ______ No contradiction. This is the correct way.

58
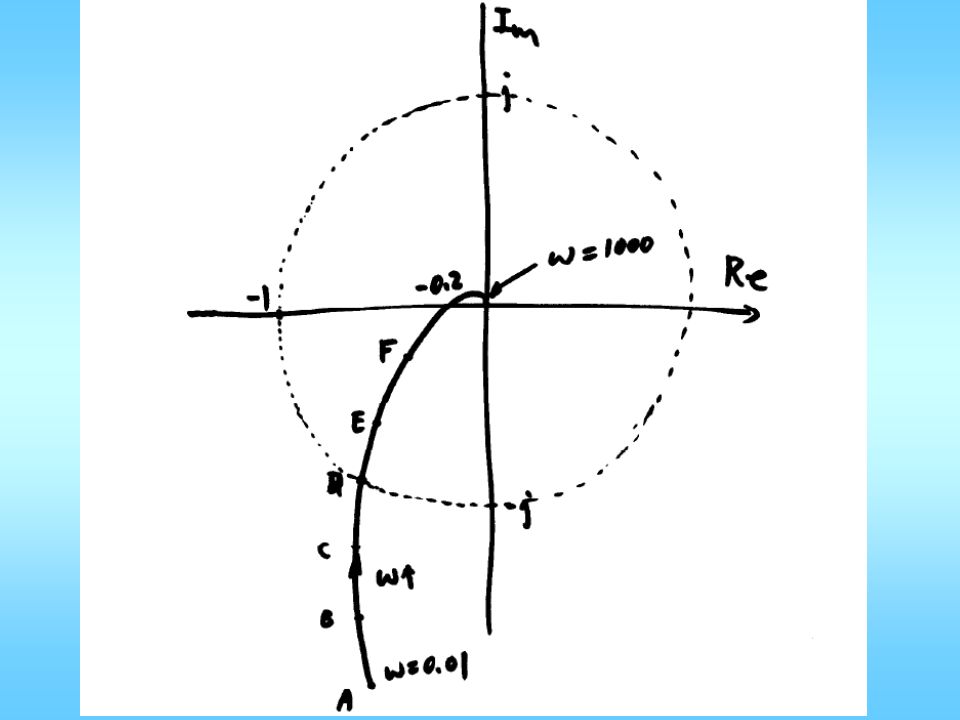
Example: G(s) stable, minimum phase P = 0 G(jω) as given: get conjugate. Connect ω = 0 – to ω = 0 +,

59
If A < –1 < 0 : N = ______ Z = P + N = ______ stability of c.l. : ______ If B < –1 < A : A=-0.2, B=-4, C=-20 N = ______ Z = P + N = ______ closed-loop stability: ______ Gain margin: gain can be varied between (-1)/(-0.2) and (-1)/(-4), or can be less than (-1)/(-20)
/(-0.2) and (-1)/(-4), or can be less than (-1)/(-20).")
60
If C < –1 < B : N = ______ Z = P + N = ______ closed-loop stability: ______ If –1 < C : N = ______ Z = P + N = ______ closed-loop stability: ______

Similar presentations










>")








