Download presentation
Presentation is loading. Please wait.

1
Chapter 9: Image Segmentation
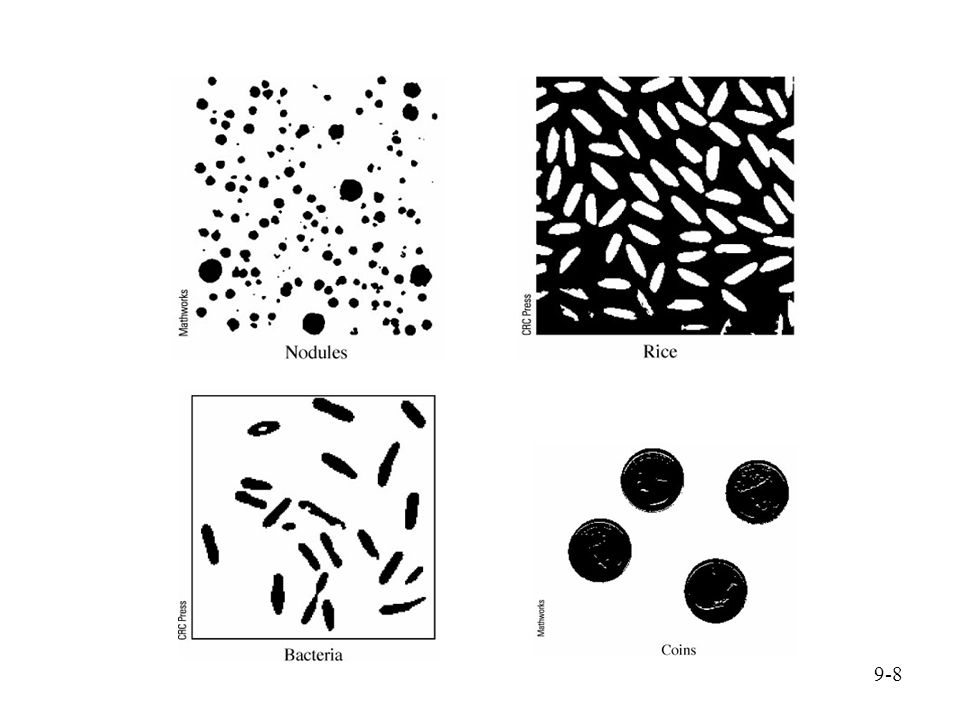
Image segmentation – partition an image into component parts Contents: (1) Thresholding (2) Edge detection
 Thresholding. (2) Edge detection.")
2
◎ Thresholoding 。 Single Thresholoding

3
。 Double Thresholding

4
。Advantages: (i) Remove unnecessary detail (ii) Bring out hidden detail
 Remove unnecessary detail (ii) Bring out hidden detail")
5
○ How to choose a threshold value
。 Histogram method

6
。 Otsu’s thresholding method
Describe the histogram as a probability distribution by

7
Let t be the determined threshold value
Define Find t such that

9
○ Adaptive Thresholding
Divide image into strips Apply Otsu’s method to each strip

10
。 Rosenfeld’s variable thresholding (i) Divide image into blocks
Global thresholding (ii) Compute histograms of block images
 Compute histograms of block images.")
11
For each block image, compute its
(1) Smooth histogram h
 Smooth histogram h.")
12
(2) Fit histogram with mixture of Gaussians let v be the gray level corresponding to the deepest valley of

13
Compute

14
(3) Test biomodality
 Test biomodality")
15
(4) If the bimodality test is past, compute T by
(5) For block (x,y) whose threshold value T(x,y) hasn’t yet been determined
 For block (x,y) whose threshold value T(x,y) hasn’t yet been determined.")
16
(6) Smooth T by (7) Determine thresholding values of image pixels by bilinear interpolation
![]()
17
Variable thresholding
Global thresholding

18
Ramp edge ◎ Edge Detection 。Types of edge: Step edge (jump edge)
Roof edge (crease edge) Smooth edge
 Smooth edge.")
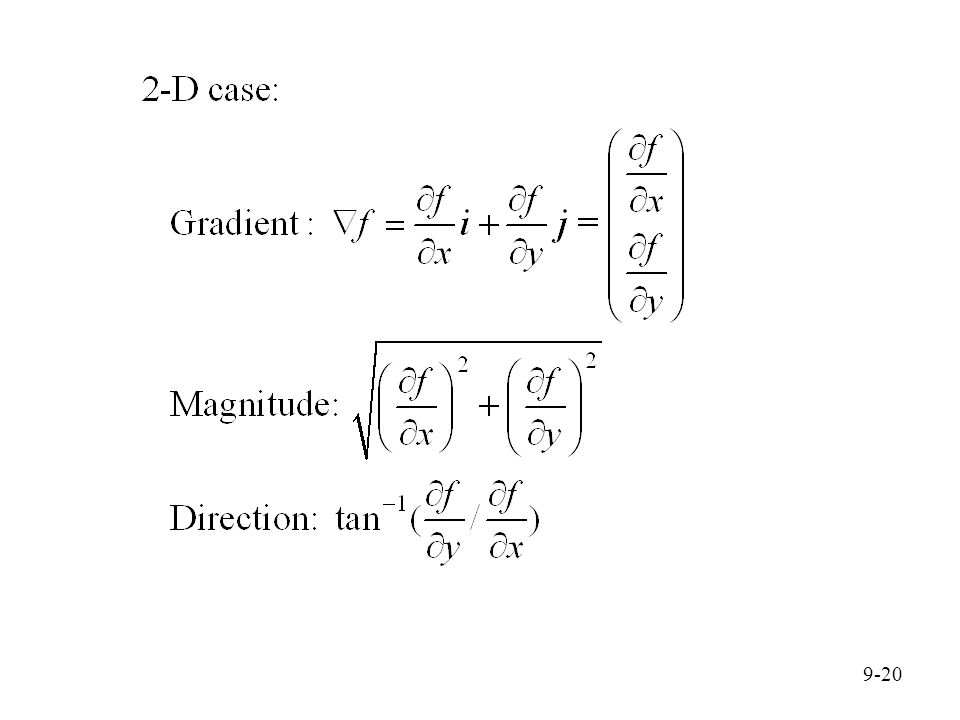
19
○ Derivatives

21
Horizontal filter: , Smooth filter:
Prewitt filters 。Consider Horizontal filter: , Smooth filter: Combine Vertical filter: , Smooth filter:

22
vertical horizontal Edge image Binary image Thinning

23
。Roberts filter: 。Sobel filter:

24
◎ Second Derivatives Laplacian:

25
Invariant under rotation (isotropic filter)
Discrete filter: Invariant under rotation (isotropic filter)
")
26
Step edge: Ramp edge:

27
。 Second derivatives are
sensitive to noise 。 Other Laplacian masks

28
○ Zero crossing 0 +, + 0 0 -, - 0 + -, - +

29
Example: Edge detection by taking zero
crossings after a Laplace filtering Marr-Hildreth method Smooth the input image using a Gaussian before Laplace filtering

30
。 Gaussian smooth + Laplace filtering
= Laplacian of Gaussian (LOG): Gaussian: LOG:
: Gaussian: LOG:")
31
Mexican hat: Difference of Gaussian (DOG): ◎ Canny edge detector
Features: 1. Precise in edge position (scale space) 2. One-pixel width edges
 2. One-pixel width edges.")
32
○ Steps: Let 1. Smoothing and Edge detection (a) Horizontal direction (b) Vertical direction (c) Edge magnitude
 Edge magnitude.")
33
(b) Quantize to (a) For each pixel p, 2. Non-maximum suppression
0, 45, 90 or 135 degs. (c) Along p is marked if its edge magnitude is larger than both its two neighbors p is deleted otherwise
![]()
34
3. Hysteresis thresholding
For each marked pixel p, (a) If > or (b) If and p is adjacent to an edge pixel p is considered as an edge pixel
 If > or. (b) If and p is adjacent to. an edge pixel. p is considered as an edge pixel.")
35
◎ Hough Transform

36
○ Line equation: y = ax + b Parameter space
A point on the line Rewrite as Another point on the line

37
○ Line equation:

Similar presentations













 Images by Pawan SinhaPawan Sinha formal terminology.>")
 HW#3 due, next week No office hours today.>")




