Download presentation
Presentation is loading. Please wait.

1
Principle Investigator: Lynton Dicks Supervisor: Karen Bradshaw CO-OPERATIVE MAPPING AND LOCALIZATION OF AUTONOMOUS ROBOTS

2
Introduction SLAM CSLAM History and Background Hardware Localization Algorithms Map Merging PRESENTATION OVERVIEW

3
Simultaneous Localization and Mapping (SLAM) Well researched for use on a single robot Uses: Google Autonomous Vehicles Navigate and map unreachable areas Military Reconnaissance Co-operative Mapping and Localization (CSLAM) Relatively new field Benefits: Team work saves time Improved Accuracy INTRODUCTION
 Well researched for use on a single robot Uses: Google Autonomous Vehicles Navigate and map unreachable areas Military Reconnaissance Co-operative Mapping and Localization (CSLAM) Relatively new field Benefits: Team work saves time Improved Accuracy INTRODUCTION")
4
SIMULTANEOUS LOCALIZATION AND MAPPING SLAMState Update Landmark Tracking (Dead reckoning) Landmark Extraction Data Association Pose TrackingOdometry
 Landmark Extraction Data Association Pose TrackingOdometry")
5
Each robots role Master-slave Independent Entities Centralization / Convergence Aggregation Communication methods COOPERATIVE MAPPING AND LOCALIZATION

6
Generic Framework for both online and offline SLAM Implemented SLAM for use with one robot Generic Programming Framework to combine standard robotic operations with AI Abstracts away the details of interfacing and controlling robots Easy to implement new robot hardware classes to allow the framework to work with new hardware HISTORY AND BACKGROUND Autonomous Robotic Programming Framework – Leslie Luyt 2009 A Robotic Framework for use in Simultaneous Localization and Mapping Algorithms – Shaun Egan 2010

7
Two Encoder Motors Two Ultrasonic Sensors A Bluetooth Controller – 10m range, ability to keep several connections alive at the same time HARDWARE – FISCHERTECHNIK ROBOT

8
HARDWARE: ADDONS Motor EncodersUltrasonic Sensors

9
TRIANGULAR BASED FUSION

10
LOCALIZATION ALGORITHMS Constraints: Unique Landmark Associations and adequately spaced landmarks Time between observations Static Environment Limited to two robots The Algorithms Extended Kalman Filter Monte Carlo Particle Filter

11
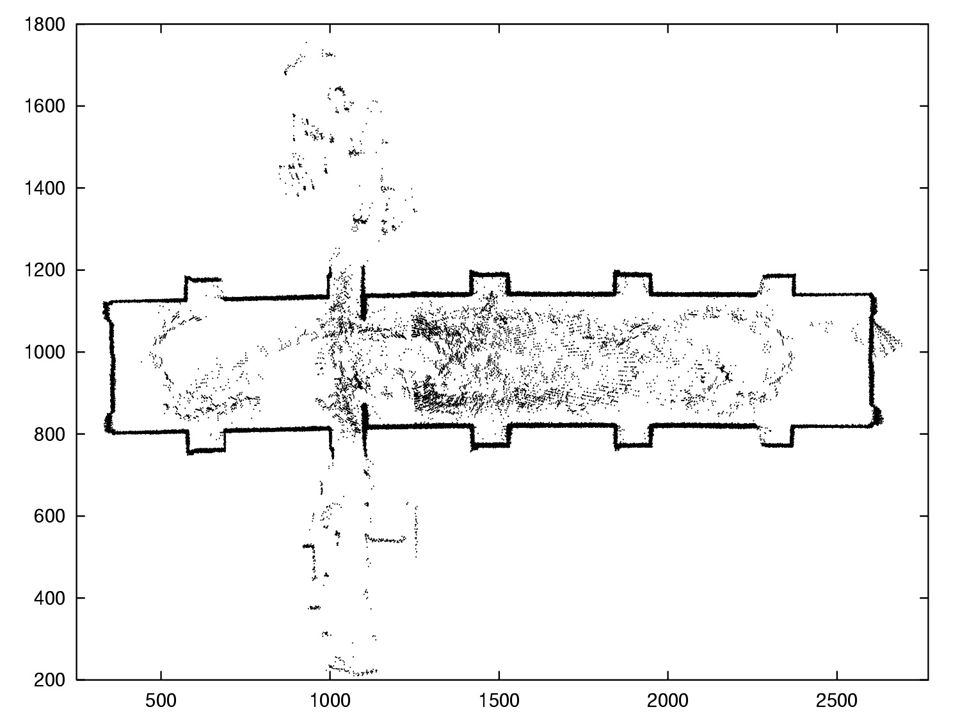
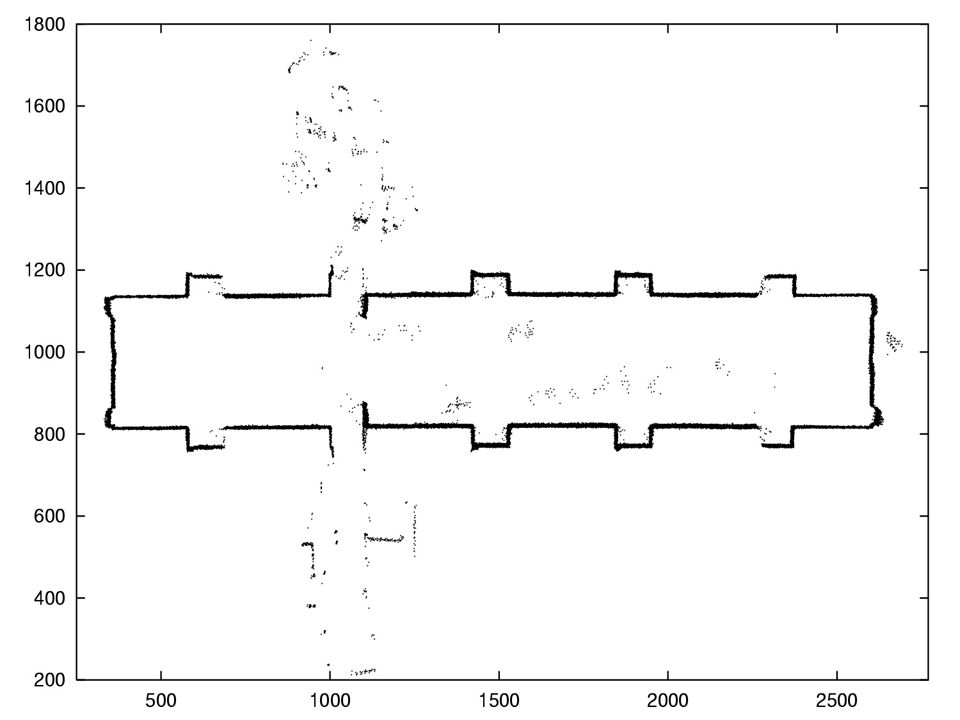
MAP MERGING Merge maps with observed robot Maps are transformed (rotated, translated) through merging algorithm Merging maps of populated environments by keeping track of moving objects
 through merging algorithm Merging maps of populated environments by keeping track of moving objects")
Similar presentations