Download presentation
Presentation is loading. Please wait.

1
Introduction to Probabilistic Robot Mapping

2
What is Robot Mapping? General Definitions for robot mapping

3
Terms and concepts related to Robot Mapping

4
What is SLAM?

5
Example of Localization for a mobile robot Yellow means fixed firm information Predicted state Robot knows map Robot knows landmarks on map Robot sees landmarks Robot wants to estimate its pose

6
Example of Mapping estimate given Robot does not know the map or its part Robot knows its pose Robot sees landmarks Robot wants to estimate landmarks on the map to create or update or extend the map. Robot creates the map

7
Real value Predicted value Robot does not know the map or its part Robot estimates its pose Robot sees landmarks Robot wants to estimate landmarks on the map to create or update or extend the map. Example of SLAM

8
The SLAM problem is chicken-or-egg problem

9
SLAM Problem is very important SLAM is the fundamental problem in robot navigation. You cannot avoid it.

10
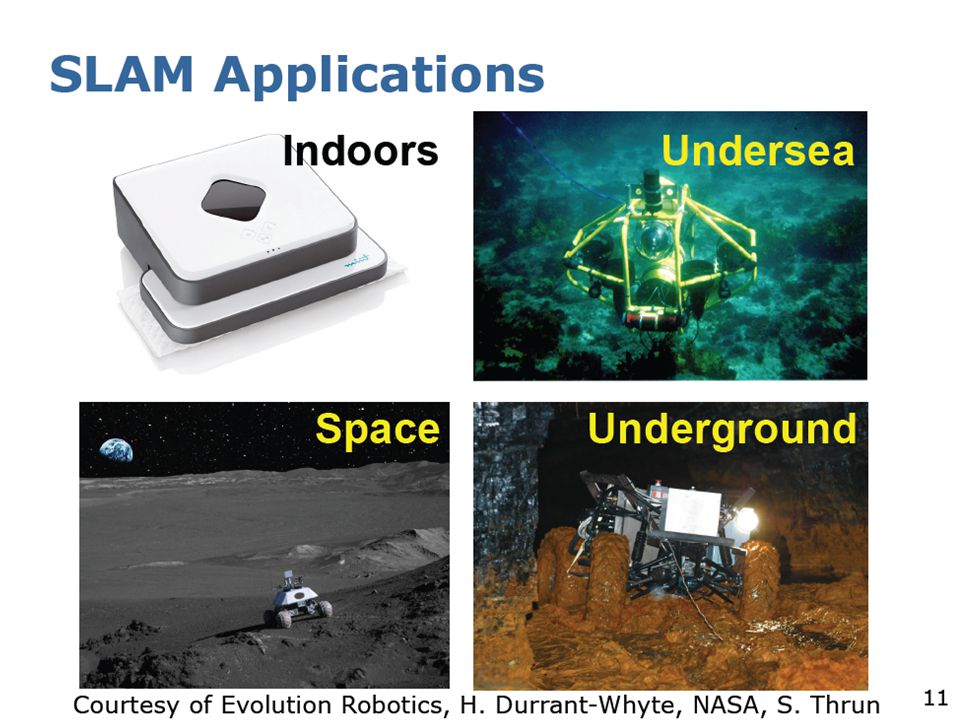
Applications of SLAM In MCECSBOT we do not have SLAM as the map is known. SLAM can be used for furniture only and items that are not on a map of the building

14
Formal Definition of the SLAM Problem

15
Definition of the SLAM Problem

16
All our work is based on Probabilistic Approaches

17
Representation of robot’s uncertainty in probabilistic terms We use the same notation as in past lectures

18
Graphical Model of Full SLAM path observations map controls

19
Full SLAM versus Online SLAM

20
Graphical Model of Online SLAM FULL SLAM Let us compare full SLAM and Online SLAM

21
Online SLAM

22
Graphical Model of Online SLAM to explain the integrations

23
Why SLAM problem is so hard to solve? The problem can be solved because map and pose estimates are correlated

24
Why SLAM is a hard problem to solve? More reasons why it is so hard.

25
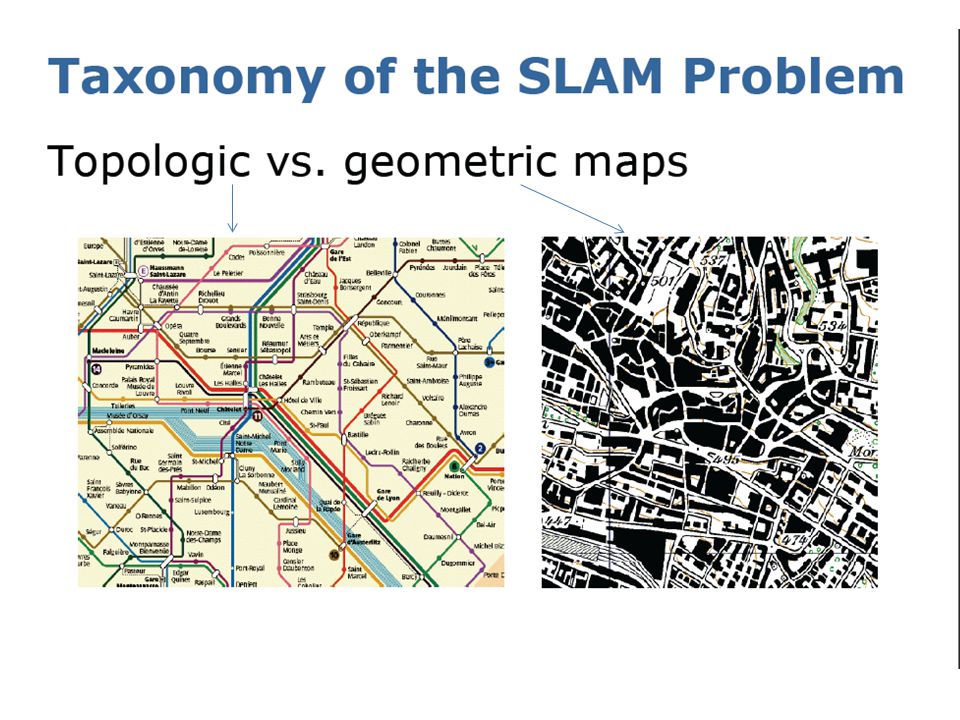
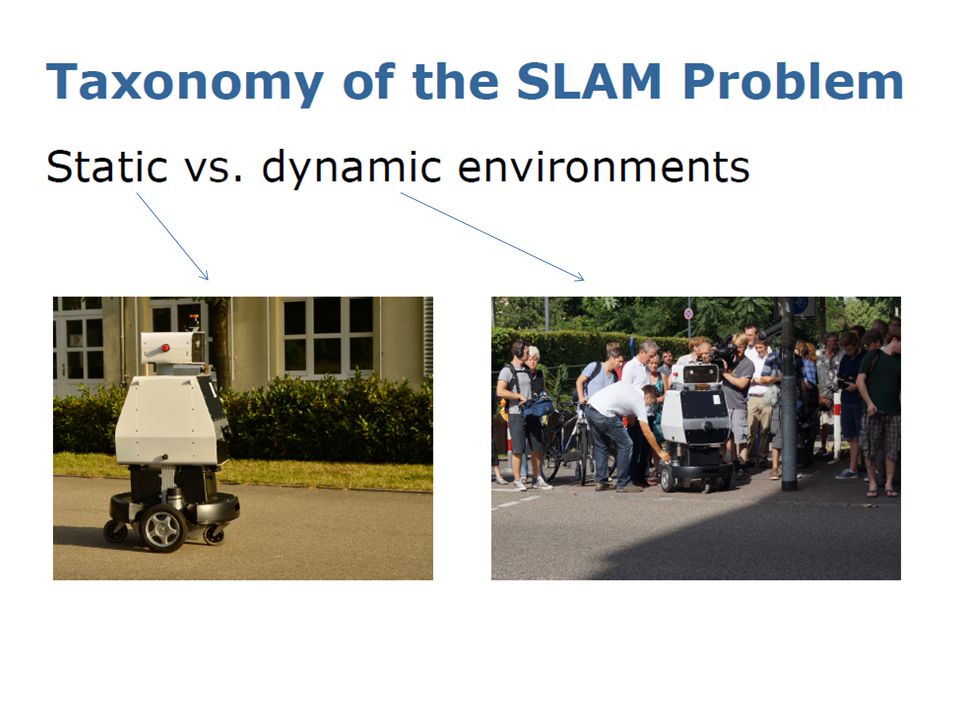
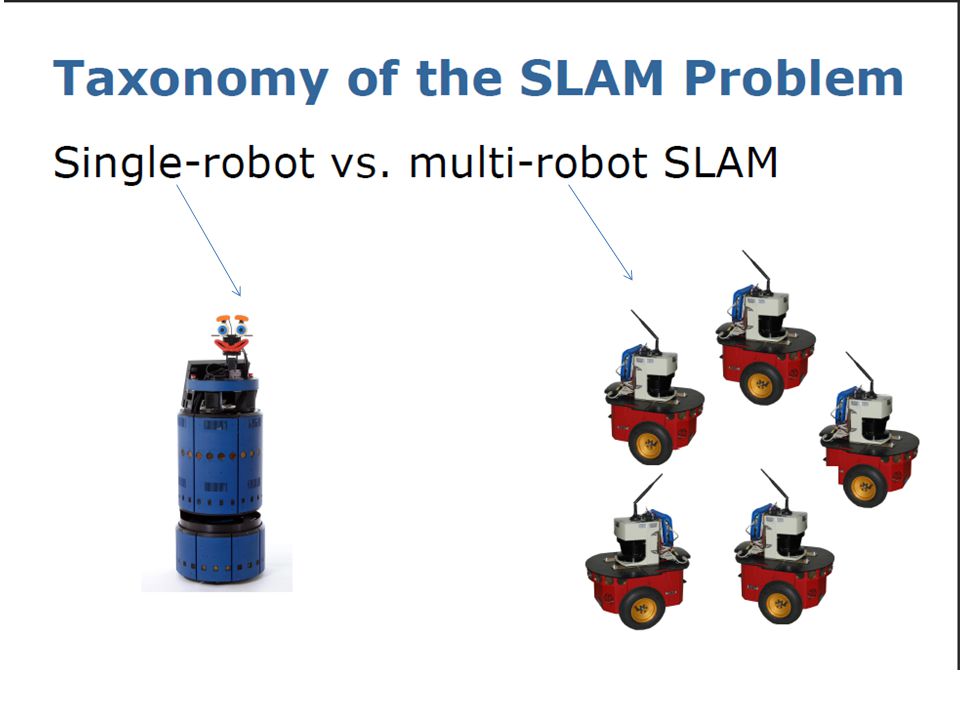
Taxonomy of SLAM problems

31
In active SLAM we have a feedback to make decision where to go next

33
Time is restrictedSpace is restricted

34
Approaches to solve the SLAM problem

36
Main Paradigms for SLAM

37
Models for SLAM

38
Model of Motion and Observation

39
Model of Motion for SLAM

40
Examples of Models of Motion

41
STANDARD ODOMETRY Model for motion of a robot new data old controls Calculate new data from old data and controls

43
Model of Observation of Sensor

44
Examples of Observation Model

46
Summary on SLAM

Similar presentations





















 George Kantor presented to Sensor Based Planning Lab Carnegie Mellon University December 8, 2000.>")





