Download presentation
Presentation is loading. Please wait.

1
Joshua Petrohilos Supervisor: Nasser Asgari

2
Bachelor of Engineering (Robotics)/Master of Engineering (Electronics) My role: Electrical Design
/Master of Engineering (Electronics) My role: Electrical Design")
3
Using MyRIO Quick movement Accurate movement Object Detection Stable arm movement Strong block gripper Voltage Regulation Power/Cutoff Switches Neat and easy to follow wiring

4
Main Processor Requires 12V Provides several inputs and outputs Uses LabView programming environment

5
Polulu 12V DC Motor Gear motor (43.7:1 ratio) 251 rpm 1.5 kg*cm torque Powerful enough to move quickly Comes with encoders for movement tracking
 251 rpm 1.5 kg*cm torque Powerful enough to move quickly Comes with encoders for movement tracking")
6
Sabertooth dual 5A Motor Driver Receives information from MyRIO When tested, found to be reasonably accurate

7
Adds feedback control to Sabertooths Confusing to calibrate and tune Found to be more useful for a motor running at a constant speed Left unused

8
ADNS-9800 Laser gaming mouse sensor Difficult to work with Ultimately redundant Went unused

9
Lidar: Light Detection and Ranging Hokuyo URG-04LX-UG01 240 º viewing angle Approximately 5.6m distance 0.352 º per scan Can be powered by USB

10
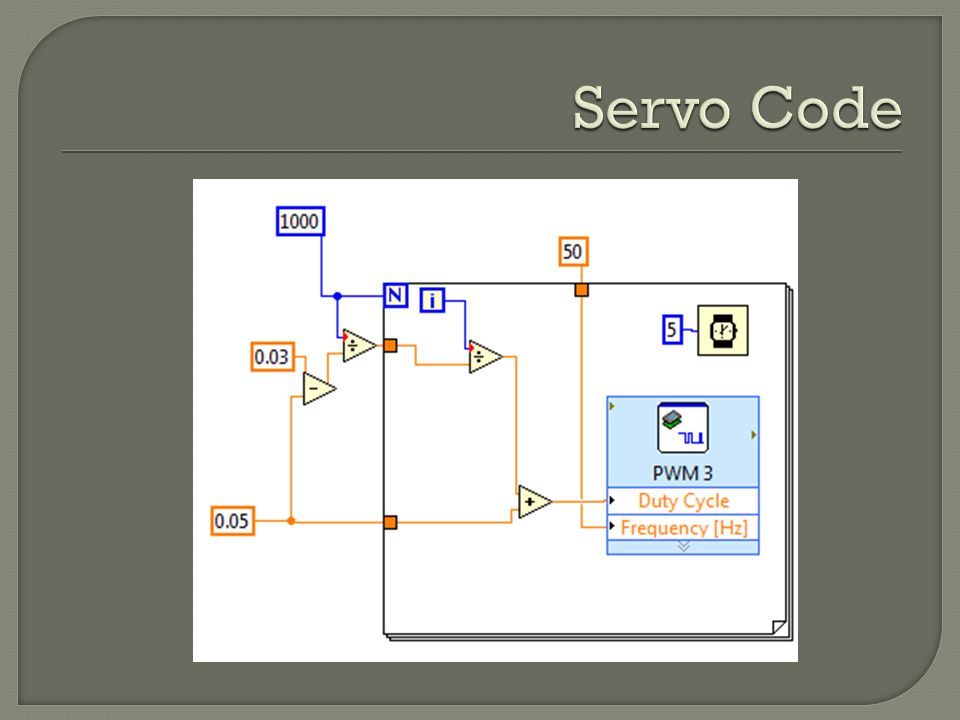
Metal Gear Servos Strong Enough to stabilise and lift arm Required 6V to operate correctly

11
Regular plastic servos Strength not as necessary as Arm servos Used 6V out of simplicity HS-311 and HS-422

13
Only servos and lidar require less than 12V MyRIO has voltage regulation (5V and 3.3V) Servos did not work with MyRIO regulation Used an adjustable step-down regulator
 Servos did not work with MyRIO regulation Used an adjustable step-down regulator")
14
One switch for power, one for motor cutoff Push button for various functions

15
Option A) Basic wiring Option B) PCB + Basic Wiring Option C) Veroboard + Basic Wiring
 Basic wiring Option B) PCB + Basic Wiring Option C) Veroboard + Basic Wiring")
16
Option C) Was chosen Still unsure of parts required Allowed easier changes Still the same amount of wiring with PCB Allows easy Voltage Regulation and grounding
 Was chosen Still unsure of parts required Allowed easier changes Still the same amount of wiring with PCB Allows easy Voltage Regulation and grounding")
19
Battery tucked behind Lidar Secure due to design Starting point for voltage regulation

20
Voltage Regulation needs to occur close to Battery Pieces of Veroboard for voltage regulation and grounding Mounted on Roof

21
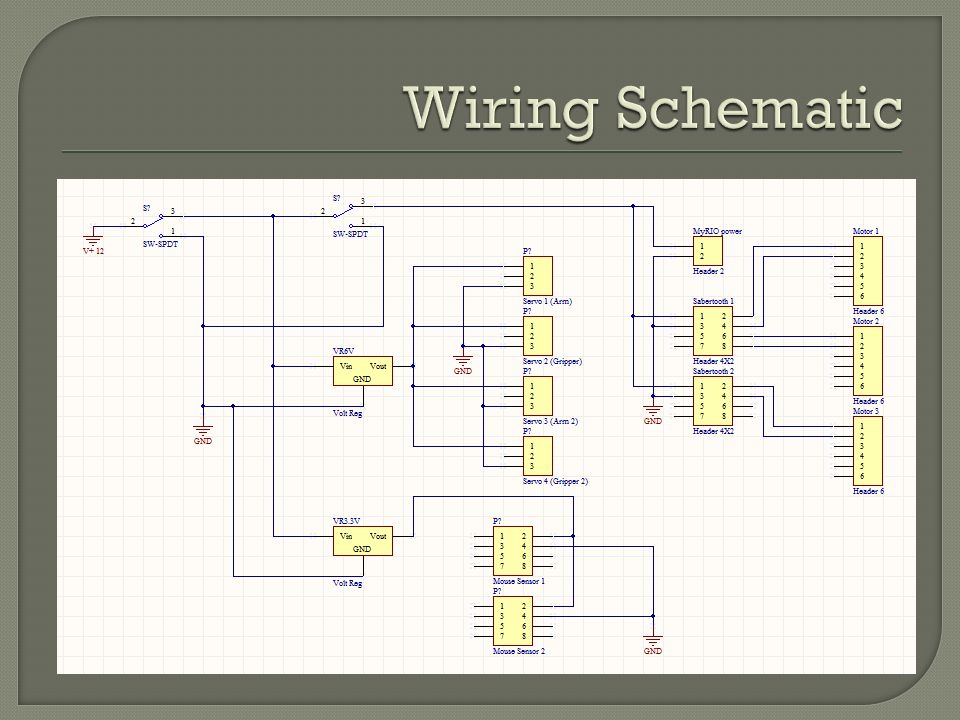
Battery power goes through power switch before going to fuse through output After fuse, goes to MyRIO and Cutoff switch Cutoff switch output then travels to Voltage Regulator

22
Sabertooths are mounted at the back

23
MyRIO mounted on top Wires housed together where possible Wires labelled for easy removal

24
Mouse Sensor Design and create PCB Circuit improvements

26
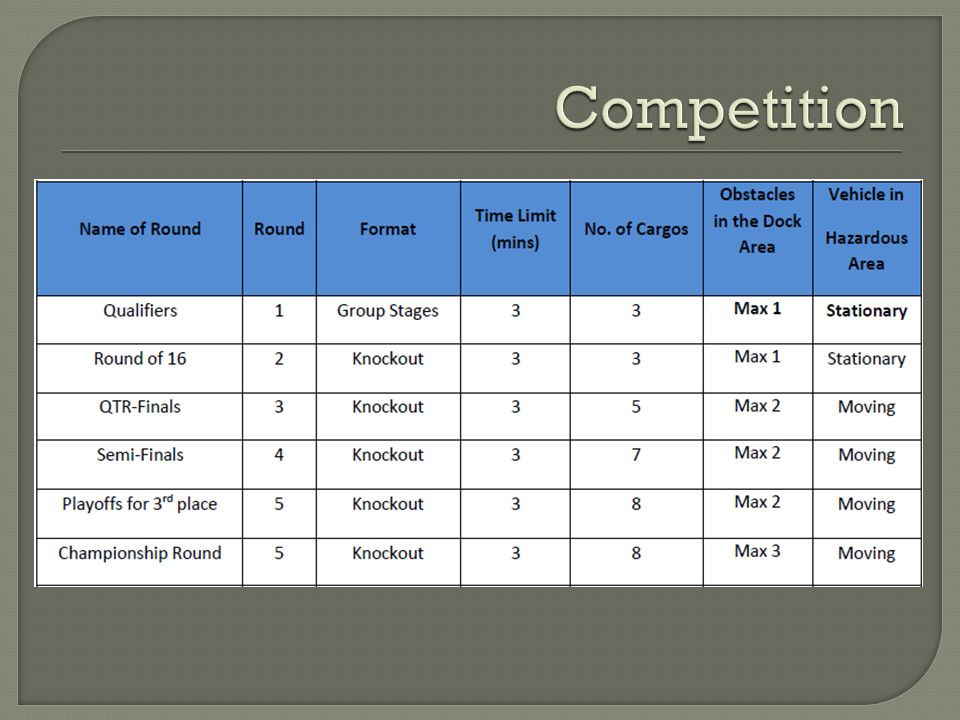
Bumpy floors Lidar possibly too low One course was incorrect size Changes were made to the program during practice to account for these issues

27
Missed out on Top 8 Happy with how the Robot performed First place: UniSA

29
Any questions?

Similar presentations















 MVRT. Main Circuit Breaker Connected to the red wire (power) of the battery When turned off, all power is cut off and robot.>")
 into a MyBlock.>")



