Download presentation
Presentation is loading. Please wait.

1
Online Control of Simulated Humanoids Using Particle Belief Propagation

2
Motivation Control simulated humanoid Various movements, environment Without any pre-computation, motion capture data At real time

3
Simulation Model : State ( pose and velocity ) : Control. ( Desire joint angle ) Character model ( 15 bones, 30 DOF )
 Character model ( 15 bones, 30 DOF ).")
4
Objective ( for balancing ) vel : speed of COM com : horizontal distance of COM from the feet y : y position of COM relative to feet feet : distance between each foot w : angular speed of the pelvis up : difference between the pelvis up vector and global up vector fwd : head facing direction damage : 10000 if the character’s head touches the environment
 vel : speed of COM com : horizontal distance of COM from the feet y : y position of COM relative to feet feet : distance between each foot w : angular speed of the pelvis up : difference between the pelvis up vector and global up vector fwd : head facing direction damage : if the character’s head touches the environment")
5
Previous work Reference Motion Simulation Fall down

6
Previous work Reference Motion Change reference motion

7
Previous work Reference Motion Simulation

8
Result Control Simulation Initial Pose

9
Result Control Simulation Initial Pose Pick best sample

10
Result Control Simulation

11
Result Control Simulation

12
Result Control Simulation

13
Result Control Simulation N : # of samples ( = 32 ) K : Planning horizon ( = 1.2s, 36 time step )
 K : Planning horizon ( = 1.2s, 36 time step )")
14
Simulation Model : State ( pose and velocity ) : Control. ( Desire joint angle ) Character model ( 15 bones, 30 DOF )
 Character model ( 15 bones, 30 DOF ).")
15
Sampling

16
Resampling Backwards local refinement Using previous trajectories as a prior

17
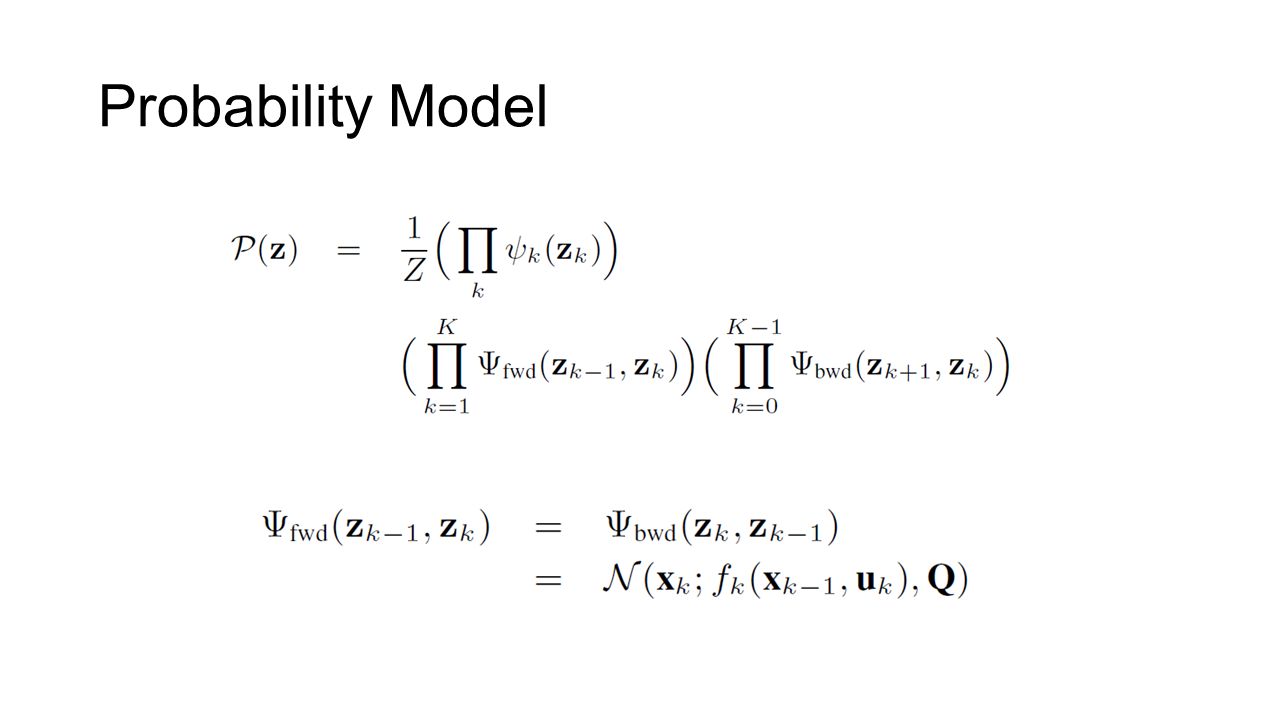
Probability Model

20
Control as Markov Random Field

21
Belief Propagation

22
Particle Belief Propagation

25
Result Control Simulation

26
Resampling

27
Local Refinement

28
Operation Over Multiple Frames

29
Current Step Previous Step

30
Sampling

31
Operation Over Multiple Frames

32
Current Step Previous Step

33
Total Algorithm

Similar presentations