Download presentation
Presentation is loading. Please wait.

1
Localization David Johnson cs6370

2
Basic Problem Go from thisto this

3
[Thrun, Burgard & Fox (2005)]
![[Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_3.jpg "[Thrun, Burgard & Fox (2005)]")
4
Kalman Filter [Thrun, Burgard & Fox (2005)]
![Kalman Filter [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_4.jpg "Kalman Filter [Thrun, Burgard & Fox (2005)]")
5
Kalman Limitations Need initial state and confidence –Doesn’t solve global localization “kidnapped robot” problem Only tracks one hypothesis at a time –Similar landmarks confuse it

6
Global methods We have used PDFs and Kalman Filter to represent and update robot state in one position Global methods represent probability of robot state everywhere at once –Pick the peak as actual location Based on Bayes filter, Markov model –Tracks a belief “bel” about where it is Side note: there is a multi-hypothesis KF that tracks multiple Gaussians at once.

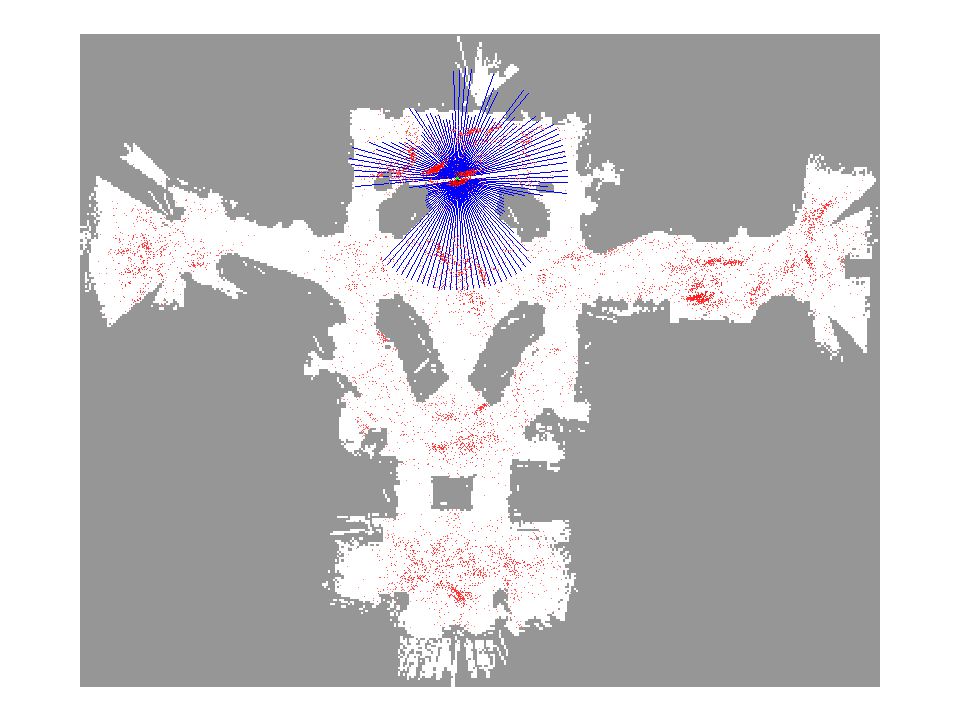
7
Markov Localization [Thrun, Burgard & Fox (2005)]
![Markov Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_7.jpg "Markov Localization [Thrun, Burgard & Fox (2005)]")
8
Global Localization The research is how to efficiently represent the global belief

9
Grid Localization Developed out of Moravec’s occupancy maps for probabilistic mapping

16
Occupancy maps Only have to represent x,y location Store probability that a cell is filled –Threshold into definitely empty or filled How is a mobile robot different?

17
Grid Localization [Thrun, Burgard & Fox (2005)]
![Grid Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_17.jpg "Grid Localization [Thrun, Burgard & Fox (2005)]")
18
Grid Localization [Thrun, Burgard & Fox (2005)]
![Grid Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_18.jpg "Grid Localization [Thrun, Burgard & Fox (2005)]")
19
Grid Localization [Thrun, Burgard & Fox (2005)]
![Grid Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_19.jpg "Grid Localization [Thrun, Burgard & Fox (2005)]")
20
Grid Localization [Thrun, Burgard & Fox (2005)]
![Grid Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_20.jpg "Grid Localization [Thrun, Burgard & Fox (2005)]")
21
Grid Localization [Thrun, Burgard & Fox (2005)]
![Grid Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_21.jpg "Grid Localization [Thrun, Burgard & Fox (2005)]")
22
Grid Localization [Thrun, Burgard & Fox (2005)]
![Grid Localization [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_22.jpg "Grid Localization [Thrun, Burgard & Fox (2005)]")
23
Illustrative Example: Robot Localization t=0 10 Prob

24
Illustrative Example: Robot Localization t=1 10 Prob

25
Illustrative Example: Robot Localization t=2 10 Prob

26
Illustrative Example: Robot Localization t=3 10 Prob

27
Illustrative Example: Robot Localization t=4 10 Prob

28
Illustrative Example: Robot Localization t=5 10 Prob 1234 Trajectory

30
Grid-based Localization

31
How do we get information to the cells? Pick closest obstacle –Precompute at each cell what the closest obstacle should be and a confidence to add to the cell if a match is made. Only update confident cells –May cause loss of global property How to do motion model? –Gaussian blur of grid

32
(Sequential) Monte Carlo filters Bootstrap filters Condensation Interacting Particle Approximations Survival of the fittest … Particle Filters
 Monte Carlo filters Bootstrap filters Condensation Interacting Particle Approximations Survival of the fittest … Particle Filters")
33
Representing Robot Location X Y

34
Sampling as Representation X Y

35
Particle Filter [Thrun, Burgard & Fox (2005)]
![Particle Filter [Thrun, Burgard & Fox (2005)]](http://images.slideplayer.com/15/4839891/slides/slide_35.jpg "Particle Filter [Thrun, Burgard & Fox (2005)]")
36
Visualization of Particle Filter unweighted measure compute importance weights p(x t-1 |z 1:t-1 ) resampling move particles predict p(x t |z 1:t-1 )
 resampling move particles predict p(x t |z 1:t-1 )")
37
Particle Filters – motion model

38
1. Prediction Phase – motion model u Motion Model

39
2. Measurement Phase Sensor Model

40
3. Resampling Step

Similar presentations






































 and Josh Bao (TA)>")





