Download presentation
Presentation is loading. Please wait.

1
Interactive Point-based Modeling of Complex Objects from Images Pierre Poulin (a,b) Marc Stamminger (a,c) François Duranleau (b) Marie-Claude Frasson (a) George Drettakis (a) (a) REVES, INRIA Sophia Antipolis (b) DIRO, Université de Montréal (c) University of Erlangen
 Marc Stamminger (a,c) François Duranleau (b) Marie-Claude Frasson (a) George Drettakis (a) (a) REVES, INRIA Sophia Antipolis (b) DIRO, Université de Montréal (c) University of Erlangen")
2
Modeling Complex Objects

3
High visual complexity Time consuming Algorithms for specialized objects –e.g., plants, mountains, etc. Adaptive rendering Many applications need such objects

4
Key Observations Extracting complex models from photos is a very powerful approach Point-based representation is very effective for complex models –Efficient display and storage User interaction is beneficial when extracting quality models –Specify where details are needed –Resolve some ambiguities

5
Image-based Point Modeling Images are very flexible –Reality-based (photos) –Acquisition is easy
 –Acquisition is easy")
6
Image-based Point Modeling Points are very flexible –Fast rendering (hardware support) –Adaptive rendering for interactive display Stamminger
 –Adaptive rendering for interactive display Stamminger")
7
Image-based Point Modeling Points are very flexible –Hierarchical organization and levels of detail Q-splat

8
Image-based Point Modeling Points are very flexible –Visual quality –Many recent advances Deussen

9
Automatic Reconstruction Images Reconstruction Process Constraints 3D Model Image

10
Interactive Reconstruction Images Reconstruction Process Constraints 3D Model Image User new images requantize recalibrate

11
Interactive Reconstruction Images Reconstruction Process Constraints 3D Model Image User color comparisons plausibility threshold new depth maps zone of interest

12
Interactive Reconstruction Images Reconstruction Process Constraints 3D Model Image User revalidate the points request more points decimate the points jitter the points sample with patterns hole filling

13
Interactive Reconstruction Images Reconstruction Process Constraints 3D Model Image User undo changes remove points add polygons

14
Interactive Reconstruction Interactive display –6 M points/sec. on a PIII 1GHz with GeForce3 Efficient reconstruction algorithm –Test more than 1K points/sec. Simple and intuitive controls –Direct interaction with the points

15
Computer Vision Contributions 3D scanners Structured light Stereo – N-views Shape-from-X Volumetric

16
Volumetric Reconstruction Voxel coloring and Space carving –If a voxel is impossible, carved out of object –Silhouettes, transparency, shading –Photo-consistency SeitzKutulakos

17
Image-based Polygon Modeling Academic: Façade, Rekon, Reality Industry: RealViz, Canoma, Photomodeler Façade

18
Image-based Polygon Modeling Small polygonal scene (30-100 polygons) Extracted textures and illumination Boivin
 Extracted textures and illumination Boivin")
20
Input Images (4/14)
")
21
Input Images Digital camera: Canon EOS-DS30 1080x720 and 2166x1440 Fixed aperture and shutter speed Try not to change zoom OpenGL and ray traced test scenes

22
Camera Calibration

23
ImageModeler from RealViz Fiduciary marks placed around the object Interactive system Intrinsic and extrinsic camera parameters

24
3D Zone of Interest

25
Initial Random Points

26
Generated randomly within the envelope More specific patterns discussed later Projection of a point in each photo Gather colors

27
Color Comparison Euclidean distance –RGB, CIE xy, CIE Luv, CIE Lab –Speed vs. accuracy Color quantized images –Precomputed (ppmquantall or more sophisticated) –Quantization only on projected zone of interest –32 to 128 colors –Reduce shading variations –Efficient test for color equality
 –Quantization only on projected zone of interest –32 to 128 colors –Reduce shading variations –Efficient test for color equality.")
28
C: 25% B: 50% Dominant Color A: 100% Plausibility 100% 33% with visibility

29
Random Points with Depth Maps

30
Depth Maps Computed from the current set of points Updated on user demand With depth maps, can raise the plausibility threshold Generate more points within the object Re-evaluation of previously generated points

31
Clean-up Points

32
In general –Increase color threshold and re-evaluate With good depth maps –Project in each image –Reject if point visible and color too different

33
Generate More Points

34
Randomly Stratified sampling based on voxels Point decimation based on voxels

35
Guide the Points

36
Smaller 3D sphere of interest –Generate more points –Eliminate all points 3D flood fill for branching patterns Patterns for planar surfaces Patterns for boundary surfaces

37
Filling with no Leaves

38
Filling with Leaves

39
Jitter the Points

40
Reprojection

41
Stepping through it again

42
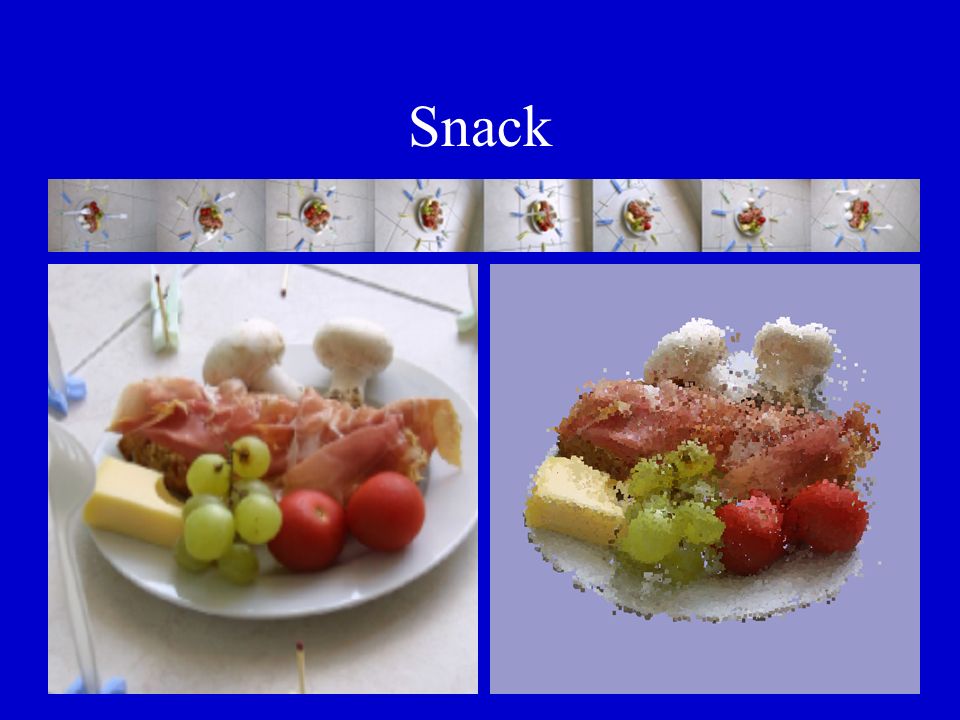
Results SceneImagesResolutionColorsPoints Fruit bowl13512x512-- Soldier132160x144064118K Snack81440x96064120K Ficcus132160x144064150K

43
Synthetic Fruit Bowl ray tracingcolor pointsreprojection

44
Toy Soldier color points reprojection

45
Snack

47
Ficcus

48
Conclusions Point-based reconstruction of complex objects from images Tight integration –3D color point representation –User-driven and/or automatic reconstructions –Interactive display Flexible to integrate most advances in computer vision

49
Findings First steps are encouraging, but objects are still of limited realism Information in photos is inspiring, but also difficult to analyse correctly How many things in a pixel? How many pixels and colors for an object?

50
Future Work Video sequences High dynamic range photos Shadows and shading in color comparison Extraction of limited BRDFs 3D texture synthesis of materials

51
Questions Did you… Is it… Can you… When… What… Where…

52
User Interaction in Modeling Specify regions of interest, thresholds, validity Control the visual quality Iterative refining process Guide the solution Automatic or interactive process Interactive display (6 M points/sec. GeForce3)
.")
53
Image-based Point Modeling Difficulties with points –Visibility Holes in surfaces, size of points Filtering the representation and the texture Not our goal to fix these difficulties for now

54
LOD in Graphics Environment maps Billboards Textured polygons Layer-depth images Light field / lumigraph

55
3D Scanners Very good results in general Size of the scanner wrt object Costs Fixed illumination

56
Stereo - N views Camera calibration Epipolar constraints Color matching 3D position and color Difficulties –Holes and occlusions –Sharp edges, noise, shading Infinity of shapes in general Targeted for object recognition and collision avoidance Only recently goal of photo-realism

57
Shape-from-X Silhouettes Shadows Focus/defocus Motion Shading etc.

Similar presentations








 – camera parameters for.>")





 COMS 4162, Lecture 21: Image-Based Rendering Ravi Ramamoorthi>")



 Jinxiang Chai.>")
