Download presentation
Presentation is loading. Please wait.

1
Rescue Simulation http://ce.sharif.edu/~arian arian@ce.sharif.edu

2
Overview of Presentation Why do we use simulation? Rescue simulation problem. The system overview. Open Projects.

3
Simulation systems in Action: Gaining extra information from the system. Experience upon the simulated system. Why do we Simulate?

4
Simulation Systems in Action: Building low level simulated system. Applying the algorithms based upon the below level.

5
Rescue Simulation Devastating earthquake left more than 6500 citizens dead in the city of Kobe, Japan on 1 st of Jan. 1995. A meeting at the city hall on April 1999 led to the Rescue simulation project, formally proposed as a competition in Robocup.

6
Rescue simulation design issues We need a general world model(city simulation issue). We need to model the disaster (disaster formulation). We need to act upon the situation.
. We need to act upon the situation..")
7
Current system in detail Main server side Cooperative server side Client side Humanoid agents 1.FireBrigade 2.PoliceForce 3.AmbulanceTeam Stationary agents 1.FireStation 2.PoliceOffice 3.AmbulanceCenter Kernel GIS Viewer Collapse simulator Blockade simulator Fire simulator Traffic simulator Misc simulator

11
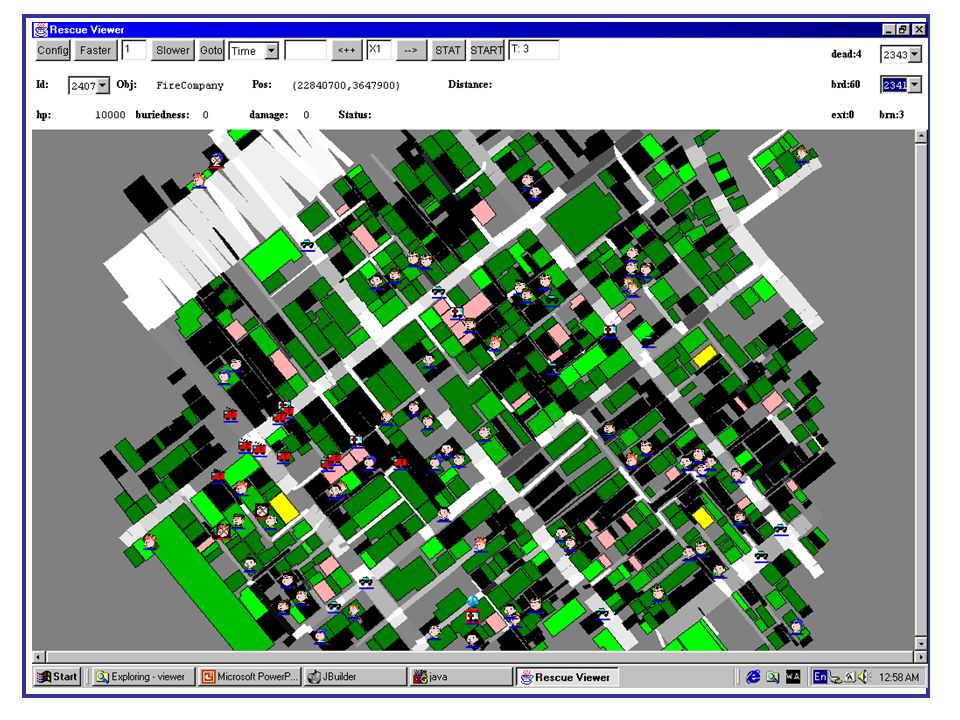
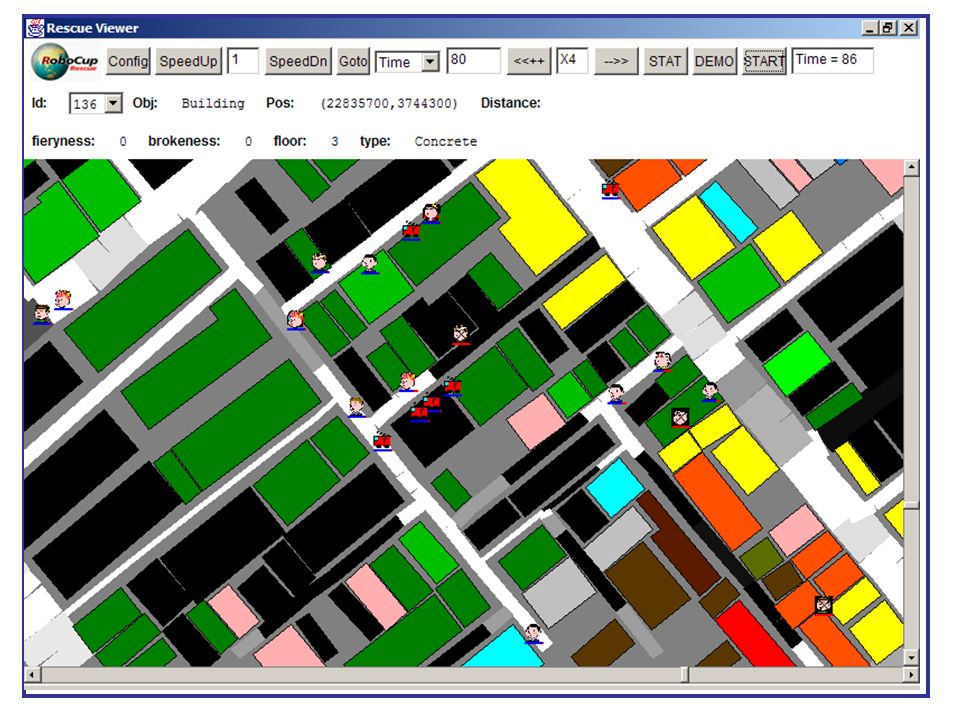
2D Viewer 3D Viewer

12
General Disaster Formulations e(t) = ƒ ( x(t), u(t), t) x(t+ t) = g( x(t), e(t)) t is time t is interval x(t) is status var. u(t) is input vector e(t) describes the state change g configures state
 is input vector e(t) describes the state change g configures state.")
13
Detailed Disaster Formulations e 1 (t) = ƒ 1 ( x(t), u(t), t) e 2 (t) = ƒ 2 ( x(t), u(t), t). e n (t) = ƒ n ( x(t), u(t), t) x(t+ t) = g( x(t), e 1 (t), e 2 (t),…, e n (t)) t is time t is interval x(t) is status var. u(t) is input vector f i (t) one disaster simulation g configures state
 = ƒ n ( x(t), u(t), t) x(t+ t) = g( x(t), e 1 (t), e 2 (t),…, e n (t)) t is time t is interval x(t) is status var. u(t) is input vector f i (t) one disaster simulation g configures state.")
14
Agent behavior formulations e a (t) = ƒ a (x a (t), s a (x(t)), u a (t), t) x(t+ t) = g( x(t), e 1 (t), e 2 (t),…, e n (t), e a1 (t), e a2 (t),…, e aN (t) ) x a (t+ t) = g a ( x a (t), s a (x(t)),e 1 (t), e 2 (t),…, e n (t), e a1 (t), e a2 (t),…, e aN (t) ) t is time t is interval x(t) is status var. e a (t) is agent work to the outside world. f a (t) agent state change s a restriction of info. For that agent g a configures agent state
 is agent work to the outside world. f a (t) agent state change s a restriction of info. For that agent g a configures agent state.")
15
Current rescue simulation system overall The system is a multi-agent system. The system is a core-based system. The system is a distributed simulation system. The system is a concrete simulation system. The system runs under Linux OS. The system is written in C++ language.

16
The System Structure Overview.

17
kernel Agents Simulators GIS Viewers Simulation Progress Kernel sends sensory information to each agent module.most of this information is visual information. This information is mixed with some errors. Each agent module decides what actions the individual should take, and send it to the kernel. This message is called command. The kernel gathers all messages sent from agent modules, and broadcasts them to the component simulators. Commands are sometimes filtered e.g late commands or commands from dead agents are discarded. The component simulators individually compute how the world will change based upon its internal status and the commands received from the kernel. These results are then sent back to the kernel The kernel integrates the results received from the component simulators, and broadcasts them to the GIS and the component simulators. The kernel then increase the simulation clock, and notifies the viewers about the update. Having being requested for information from the viewers, GIS sends the updated information to the viewers. (GIS keeps track of the changes in the simulated world).
..")
18
Object structure in the system

19
Properties of entities Building Floors Style Ignition Fieryness Brokenness Shape Entrances Neighbors

20
Properties of entities(contd.) Road Head/Tail Length Kind Width Block Repair Cost Cars Pass to head/tail
 Road Head/Tail Length Kind Width Block Repair Cost Cars Pass to head/tail")
21
Properties of entities(contd.) Humanoid Agents(civilian) HP Damage Buriedness Position positionExtra Fire Brigade Water Quantity Stretched Length
 Humanoid Agents(civilian) HP Damage Buriedness Position positionExtra Fire Brigade Water Quantity Stretched Length")
22
Commands of the system Sense All the agents Say All the agents Tell All the agents Hear All the agents Move Humanoids Rest Humanoids Clear Police force Extinguish Fire brigade

23
Commands of the system(Contd.) Stretch (disabled) Fire brigade Rescue Ambulance team Load Ambulance team Unload Ambulance team
 Stretch (disabled) Fire brigade Rescue Ambulance team Load Ambulance team Unload Ambulance team")
24
Summary of the Prev. Session(1) Simulations fall into 2 major groups: Gaining extra info. about the system(@class) Experiencing new algorithms in the system(@Robocup) Key Concepts in Simulation systems: World Model / Agent Single-Agents / Multi-Agents Sensing / Action / Command Rescue Simulation Problem. Simulators / Agents

25
Summary of the Prev. Session(2) Simulators Collapse Blockade Traffic Fire Misc Agents Humanoid Fire Brigade Ambulance team Police Force Stations Fire Station Ambulance Center Police Office Let’s go, See them in Action
 Simulators Collapse Blockade Traffic Fire Misc Agents Humanoid Fire Brigade Ambulance team Police Force Stations Fire Station Ambulance Center Police Office Let’s go, See them in Action.")
26
Our side of the story Our side of the story

27
Main issues for programming under rescue simulation Very limited information of the world model. Uncertainty (sensor noise). Huge amount of data to be processed. Multi-agent approach of the system. Random behavior of the system.
. Huge amount of data to be processed. Multi-agent approach of the system. Random behavior of the system..")
28
Why do we use communication? Communication as a solution for gaining extra information from the world model. Communication as a solution for noise recovery. Communication as a way of synchronizing agents’ behaviors.

29
Overview of Communication in RescueSimulation FB FS AC AT PO PF

30
Sample agents’ messages FB/AT/PF to AT when buried in a building AT to AT reporting duties AT/FB to PF requesting to open the road

31
Problems with simple CM (Communication Manager) Real-time behavior of the messaging system. Only 4 messages in each cycle can be heard or said. Most of the messages to be TXed are multi-hopped. Once an agent in the link cannot hand in the message,total message is lost.

32
Open Projects for RescueSimulation Modifying kernel to add some functionalities to the system Modifying viewer to add debugging information. Writing Traffic Simulator under windows.

33
Kernel Modification Current kernel: Sends position information to each agent Representable information is sent only to the viewers(it’s complete & noiseless). Id of objects is not unique for different agents.

34
Kernel Modification New kernel should: Send path information to each agent & the debugger. Represent able information is sent to each agent also (convert sensible information to representable information). Provide the uniqueness of Ids among the different type of agents.
. Provide the uniqueness of Ids among the different type of agents..")
35
Viewer Modification Debugging info. Showing the path taken by each agent.(needs kernel support). A tool for comparing the noiseless information sent to viewers with noisy info sent to the agents(needs the kernel support).
..")
36
Thank You! You can download this presentation at : http://ce.sharif.edu/~arian/present.ppt Ali Nouri : http://ce.sharif.edu/~nouri nouri@ce.sharif.edu Arian rescue simulation team: http://ce.sharif.edu/~arian arian@ce.sharif.edu

Similar presentations














 Ikuo Takeuchi Tetsuhiko Koto (Univ. of Electro Communication,>")




